一、概念
卷积神经网络主要是由输入层、卷积层、激活函数、池化层、全连接层、损失函数组成,表面看比较复杂,其实质就是特征提取以及决策推断。
要使特征提取尽量准确,就需要将这些网络层结构进行组合,比如经典的卷积神经网络模型AlexNet:5个卷积层+3个池化层+3个连接层结构。
2.1 卷积(convolution)
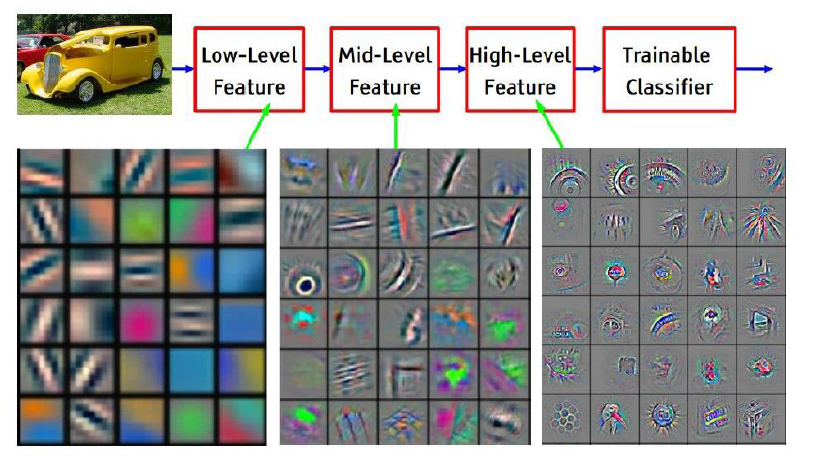
卷积的作用就是提取特征,因为一次卷积可能提取的特征比较粗糙,所以多次卷积,以及层层纵深卷积,层层提取特征(千万要区别于多次卷积,因为每一层里含有多次卷积)。
这里可能就有小伙伴问:为什么要进行层层纵深卷积,而且还要每层多次?
你可以理解为物质A有自己的多个特征(高、矮、胖、瘦、、、),所以在物质A上需要多次提取,得到不同的特征,然后这些特征组合后发生化学反应生成物质B,
而物质B又有一些新的专属于自己的特征,所以需要进一步卷积。这是我个人的理解,不对的话或者有更形象的比喻还请不吝赐教啊。
在卷积层中,每一层的卷积核是不一样的。比如AlexNet
第一层:96*11*11(96表示卷积核个数,11表示卷积核矩阵宽*高) stride(步长) = 4 pad(边界补零) = 0
第二层:256*5*5 stride(步长) = 1 pad(边界补零) = 2
第三,四层:384*3*3 stride(步长) = 1 pad(边界补零) = 1
第五层:256*3*3 stride(步长) = 1 pad(边界补零) = 2
卷积的篇幅说了这么多,那么到底是如何进行运算的呢,虽说网络上关于卷积运算原理铺天盖地,但是个人总感觉讲得不够透彻,或者说本人智商有待提高,
希望通过如下这幅图(某位大神的杰作)来使各位看官们能够真正理解。

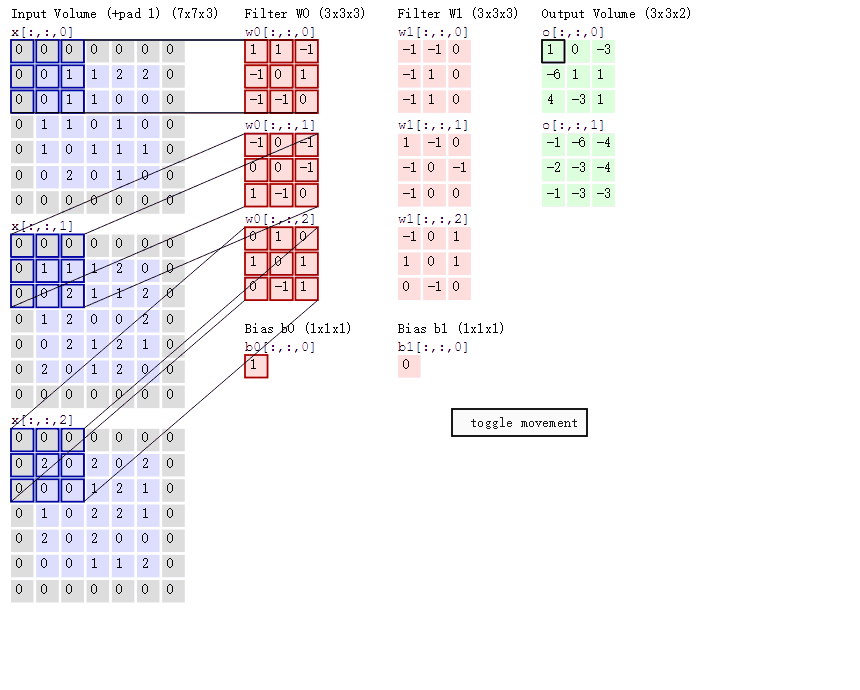
这里举的例子是一个输入图片(5*5*3),卷积核(3*3*3),有两个(Filter W0,W1),偏置b也有两个(Bios b0,b1),卷积结果Output Volumn(3*3*2),步长stride = 2。
输入:7*7*3 是因为 pad = 1 (在图片边界行和列都补零,补零的行和的数目是1),
(对于彩色图片,一般都是RGB3种颜色,号称3通道,7*7指图片高h * 宽w)
,补零的作用是能够提取图片边界的特征。
卷积核深度为什么要设置成3呢?这是因为输入是3通道,所以卷积核深度必须与输入的深度相同。至于卷积核宽w,高h则是可以变化的,但是宽高必须相等。
卷积核输出o[0,0,0] = 3 (Output Volumn下浅绿色框结果),这个结果是如何得到的呢? 其实关键就是矩阵对应位置相乘再相加(千万不要跟矩阵乘法搞混淆啦)
=> w0[:,:,0] * x[:,:,0]蓝色区域矩阵(R通道) + w0[:,:,1] * x[:,:,1]蓝色区域矩阵(G通道)+ w0[:,:,2] * x[:,:,2]蓝色区域矩阵(B通道) + b0(千万不能丢,因为 y = w * x + b)
第一项 => 0 * 1 + 0 * 1 + 0 * 1 + 0 * (-1) + 1 * (-1) + 1 * 0 + 0 * (-1) + 1 * 1 + 1 * 0 = 0
第二项 => 0 * (-1) + 0 * (-1) + 0 * 1 + 0 * (-1) + 0 * 1 + 1 * 0 + 0 * (-1) + 2 * 1 + 2 * 0 = 2
第三项 => 0 * 1 + 0 * 0 + 0 * (-1) + 0 * 0 + 2 * 0 + 2 * 0 + 0 * 1 + 0 * (-1) + 0 * (-1) = 0
卷积核输出o[0,0,0] = > 第一项 + 第二项 + 第三项 + b0 = 0 + 2 + 0 + 1 = 3
o[0,0,1] = -5 又是如何得到的呢?
因为这里的stride = 2 ,所以 输入的窗口就要滑动两个步长,也就是红色框的区域,而运算跟之前是一样的
第一项 => 0 * 1 + 0 * 1 + 0 * 1 + 1 * (-1) + 2 * (-1) + 2 * 0 + 1 * (-1) + 1 * 1 + 2 * 0 = -3
第二项 => 0 * (-1) + 0 * (-1) + 0 * 1 + 1 * (-1) + 2 * 1 + 0 * 0 + 2 * (-1) + 1 * 1 + 1 * 0 = 0
第三项 => 0 * 1 + 0 * 0 + 0 * (-1) + 2 * 0 + 0 * 0 + 1 * 0 + 0 * 1 + 2 * (-1) + 1 * (-1) = - 3
卷积核输出o[0,0,1] = > 第一项 + 第二项 + 第三项 + b0 = (-3) + 0 + (-3) + 1 = -5
之后以此卷积核窗口大小在输入图片上滑动,卷积求出结果,因为有两个卷积核,所有就有两个输出结果。
这里小伙伴可能有个疑问,输出窗口是如何得到的呢?
这里有一个公式:输出窗口宽 w = (输入窗口宽 w - 卷积核宽 w + 2 * pad)/stride + 1 ,输出高 h = 输出窗口宽 w
以上面例子, 输出窗口宽 w = ( 5 - 3 + 2 * 1)/2 + 1 = 3 ,则输出窗口大小为 3 * 3,因为有2个输出,所以是 3*3*2。
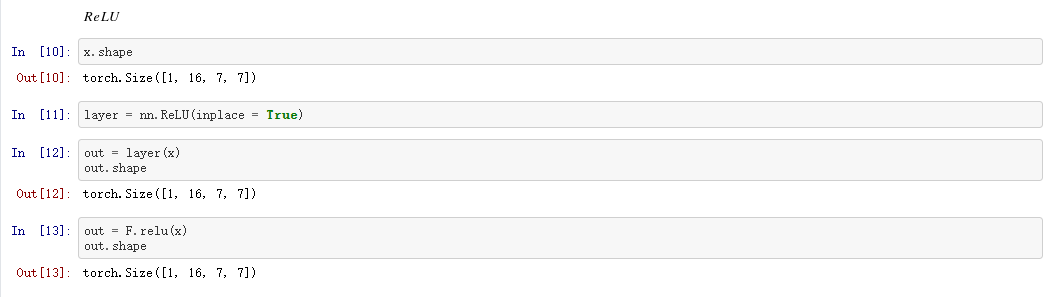
2.2 Relu激活函数

相信看过卷积神经网络结构(CNN)的伙伴们都知道,激活函数无处不在,特别是CNN中,在卷积层后,全连接(FC)后都有激活函数Relu的身影,
那么这就自然不得不让我们产生疑问:
问题1、为什么要用激活函数?它的作用是什么?
问题2、在CNN中为什么要用Relu,相比于sigmoid,tanh,它的优势在什么地方?
对于第1个问题:由 y = w * x + b 可知,如果不用激活函数,每个网络层的输出都是一种线性输出,而我们所处的现实场景,其实更多的是各种非线性的分布。
这也说明了激活函数的作用是将线性分布转化为非线性分布,能更逼近我们的真实场景。
对于第2个问题: 先看sigmoid,tanh分布

他们在 x ->![]() 时,输出就变成了恒定值,因为求梯度时需要对函数求一阶偏导数,而不论是sigmoid,还是tanhx,他们的偏导都为0,
时,输出就变成了恒定值,因为求梯度时需要对函数求一阶偏导数,而不论是sigmoid,还是tanhx,他们的偏导都为0,
也就是存在所谓的梯度消失问题,最终也就会导致权重参数w , b 无法更新。相比之下,Relu就不存在这样的问题,另外在 x > 0 时,
Relu求导 = 1,这对于反向传播计算dw,db,是能够大大的简化运算的。
使用sigmoid还会存在梯度爆炸的问题,比如在进行前向传播和反向传播迭代次数非常多的情况下,sigmoid因为是指数函数,其结果中
某些值会在迭代中累积,并成指数级增长,最终会出现NaN而导致溢出。
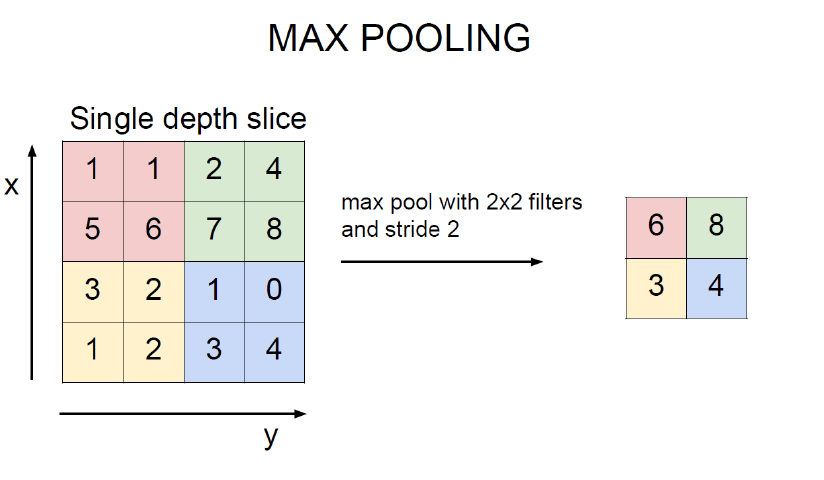
2.3 池化
池化层一般在卷积层+ Relu之后,它的作用是:
1、减小输入矩阵的大小(只是宽和高,而不是深度),提取主要特征。(不可否认的是,在池化后,特征会有一定的损失,所以,有些经典模型就去掉了池化这一层)。
它的目的是显而易见的,就是在后续操作时能降低运算。
2、一般采用mean_pooling(均值池化)和max_pooling(最大值池化),对于输入矩阵有translation(平移),rotation(旋转),能够保证特征的不变性。
mean_pooling 就是输入矩阵池化区域求均值,这里要注意的是池化窗口在输入矩阵滑动的步长跟stride有关,一般stride = 2.(图片是直接盗过来,这里感谢原创)
最右边7/4 => (1 + 1 + 2 + 3)/4
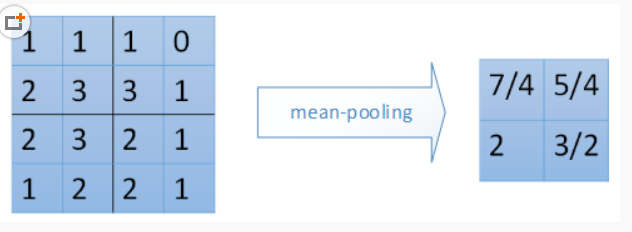
max_pooling 最大值池化,就是每个池化区域的最大值放在输出对应位置上。
2.4 全连接(full connection)
作用:分类器角色,将特征映射到样本标记空间,本质是矩阵变换(affine)。
至于变换的实现见后面的代码流程图,或者最好是跟一下代码,这样理解更透彻。
2.5 损失函数(softmax_loss)
作用:计算损失loss,从而求出梯度grad。
常用损失函数有:MSE均方误差,SVM(支持向量机)合页损失函数,Cross Entropy交叉熵损失函数。
这几种损失函数目前还看不出谁优谁劣,估计只有在具体的应用场景中去验证了。至于这几种损失函数的介绍,
大家可以去参考《常用损失函数小结》https://blog.csdn.net/zhangjunp3/article/details/80467350,这个哥们写得比较详细。
在后面的代码实例中,用到的是softmax_loss,它属于Cross Entropy交叉熵损失函数。
softmax计算公式:
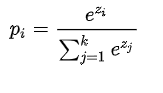
其中, 是要计算的类别
的网络输出,分母是网络输出所有类别之和(共有
个类别),
表示第
类的概率。
交叉熵损失:
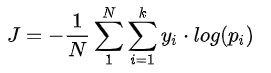
其中, 是类别
的真实标签,
表示第
类的概率,
是样本总数,
是类别数。
梯度:
=
当
!=
=
- 1 当
=
其中 表示真实标签对应索引下预测的目标值,
类别索引。
这个有点折磨人,原理讲解以及推导请大家可以参考这位大神的博客:http://www.cnblogs.com/zongfa/p/8971213.html。
2.6 前向传播(forward propagation)
前向传播包含之前的卷积,Relu激活函数,池化(pool),全连接(fc),可以说,在损失函数之前操作都属于前向传播。
主要是权重参数w , b 初始化,迭代,以及更新w, b,生成分类器模型。
2.7 反向传播(back propagation)
反向传播包含损失函数,通过梯度计算dw,db,Relu激活函数逆变换,反池化,反全连接。
2.8 随机梯度下降(sgd_momentum)
作用:由梯度grad计算新的权重矩阵w
sgd公式:
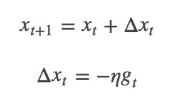
其中,η为学习率,gt为x在t时刻的梯度。
一般我们是将整个数据集分成n个epoch,每个epoch再分成m个batch,每次更新都利用一个batch的数据,而非整个训练集。
优点:batch的方法可以减少机器的压力,并且可以更快地收敛。
缺点:其更新方向完全依赖于当前的batch,因而其更新十分不稳定。
为了解决这个问题,momentum就横空出世了,具体原理详解见下路派出所(这名字霸气)的博客http://www.cnblogs.com/callyblog/p/8299074.html。
momentum即动量,它模拟的是物体运动时的惯性,即更新的时候在一定程度上保留之前更新的方向,同时利用当前batch的梯度微调最终的更新方向。
这样一来,可以在一定程度上增加稳定性,从而学习地更快,并且还有一定摆脱局部最优的能力:
其中,ρ 即momentum,表示要在多大程度上保留原来的更新方向,这个值在0-1之间,在训练开始时,由于梯度可能会很大,所以初始值一般选为0.5;
当梯度不那么大时,改为0.9。η 是学习率,即当前batch的梯度多大程度上影响最终更新方向,跟普通的SGD含义相同。ρ 与 η 之和不一定为1。
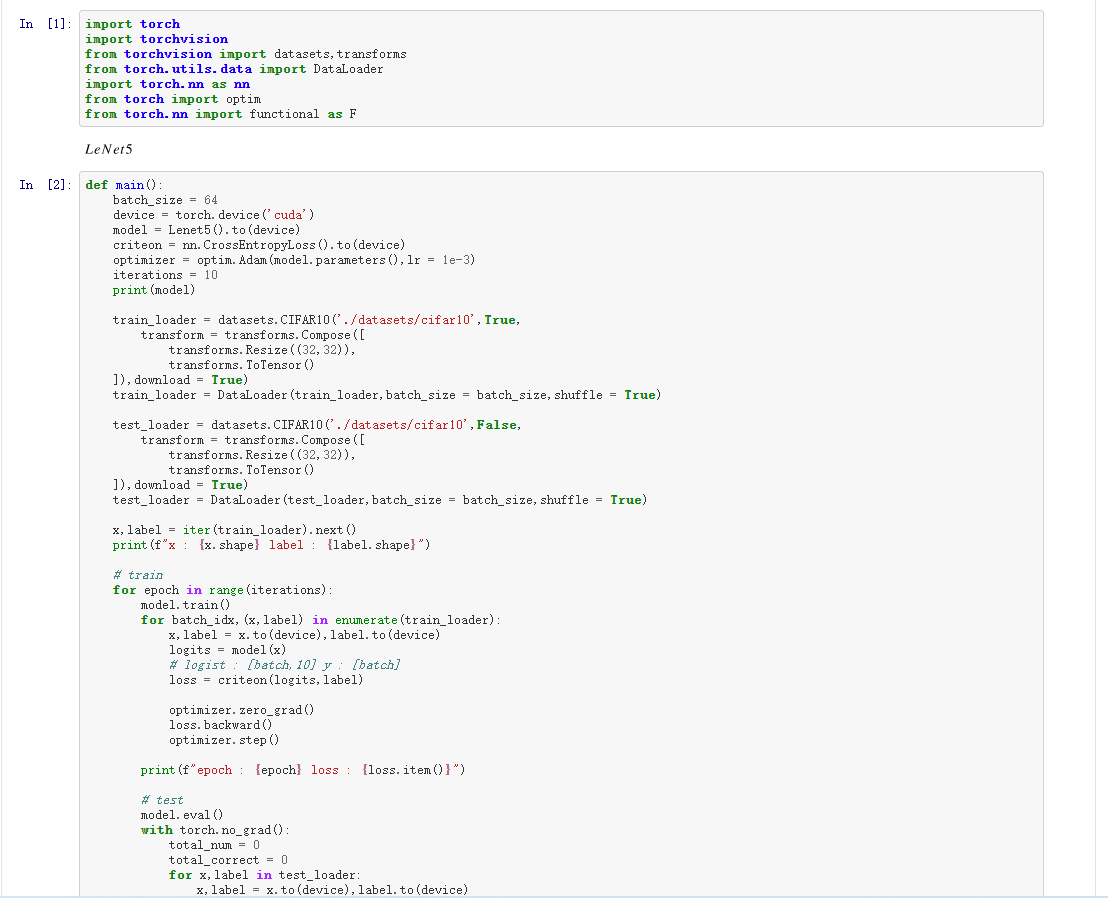
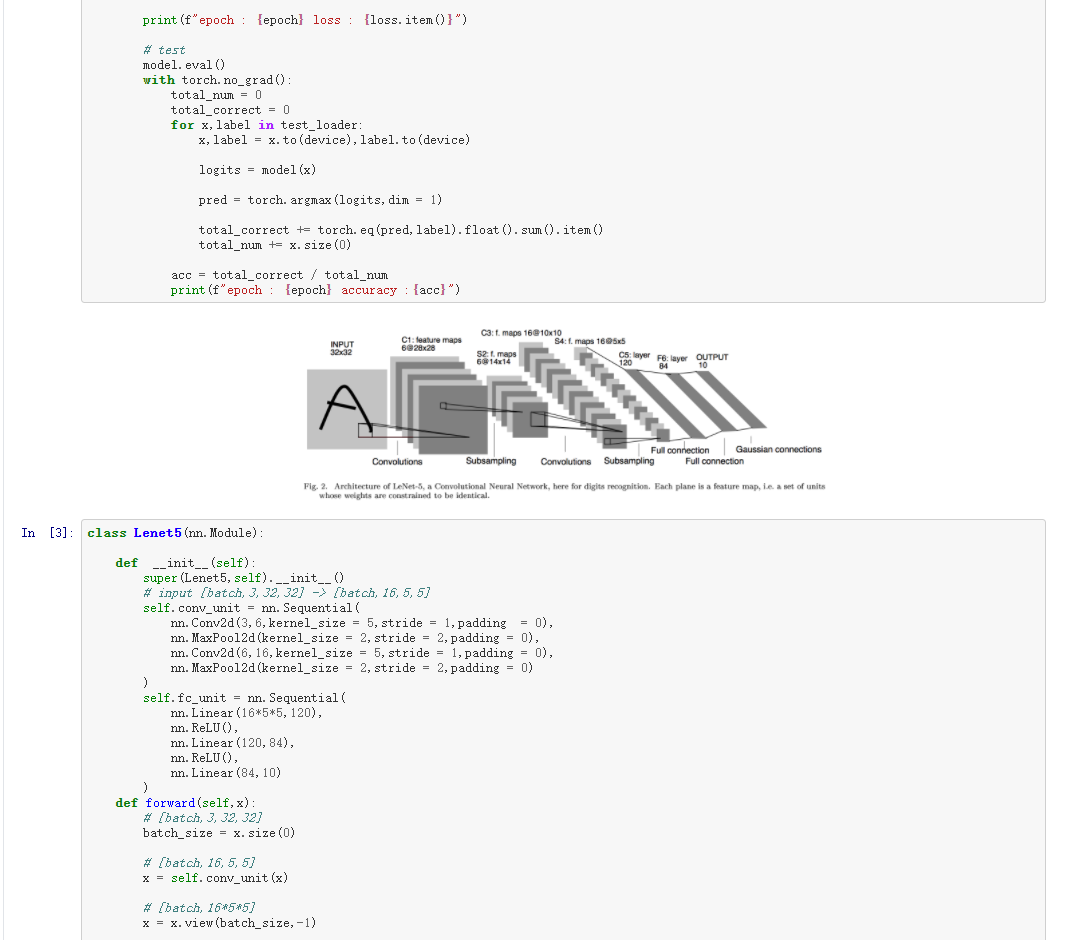
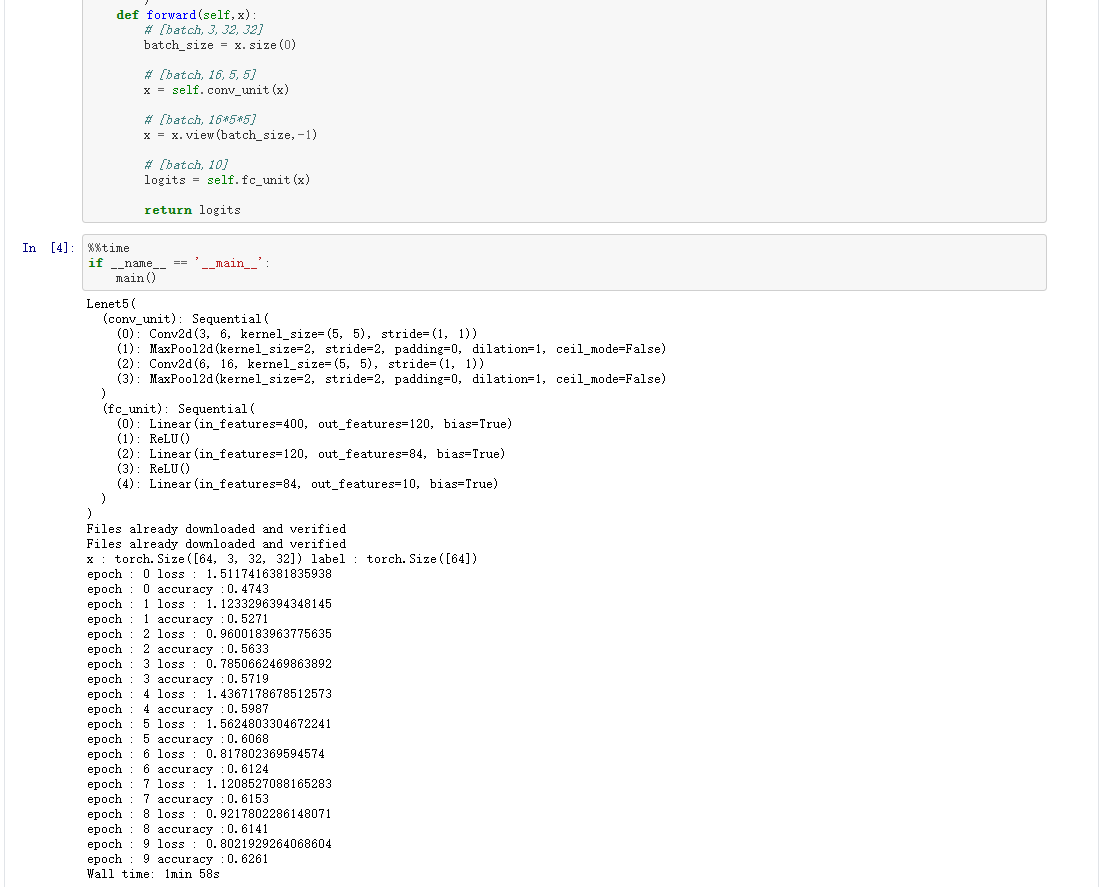
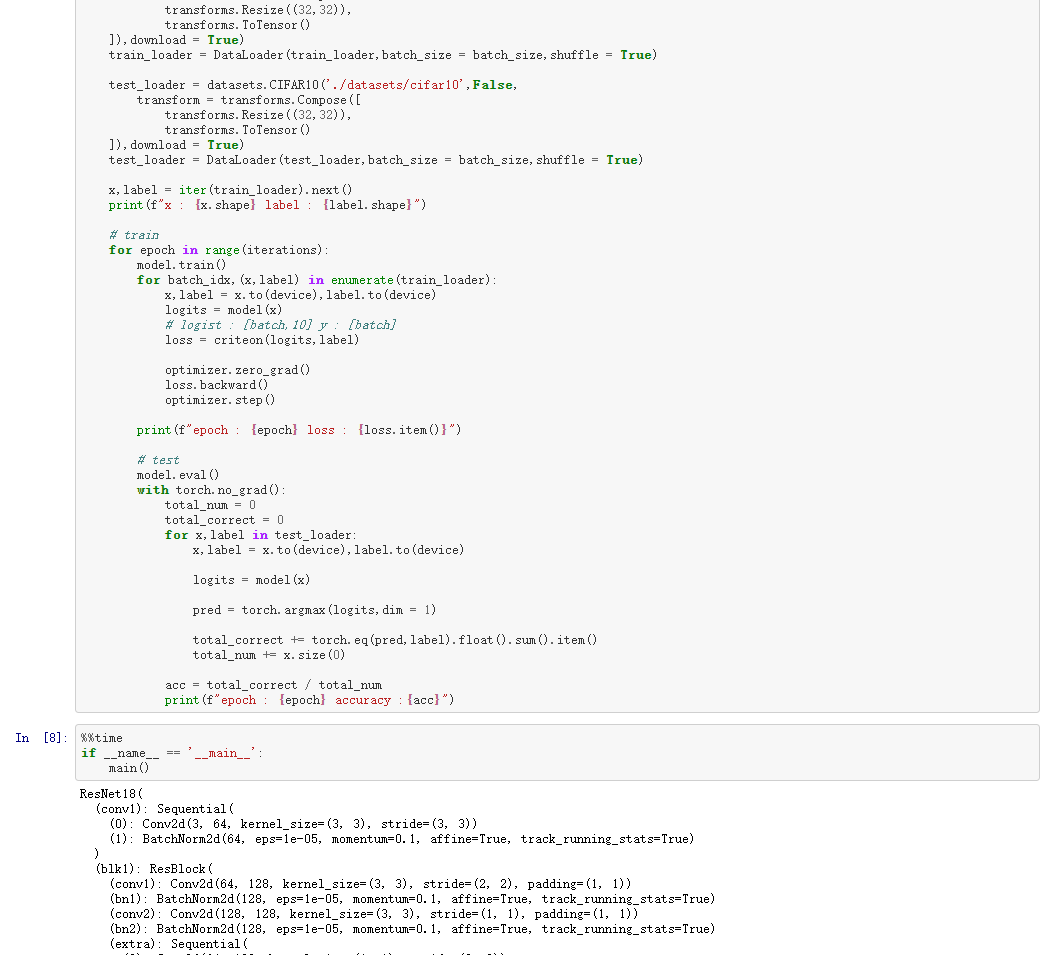
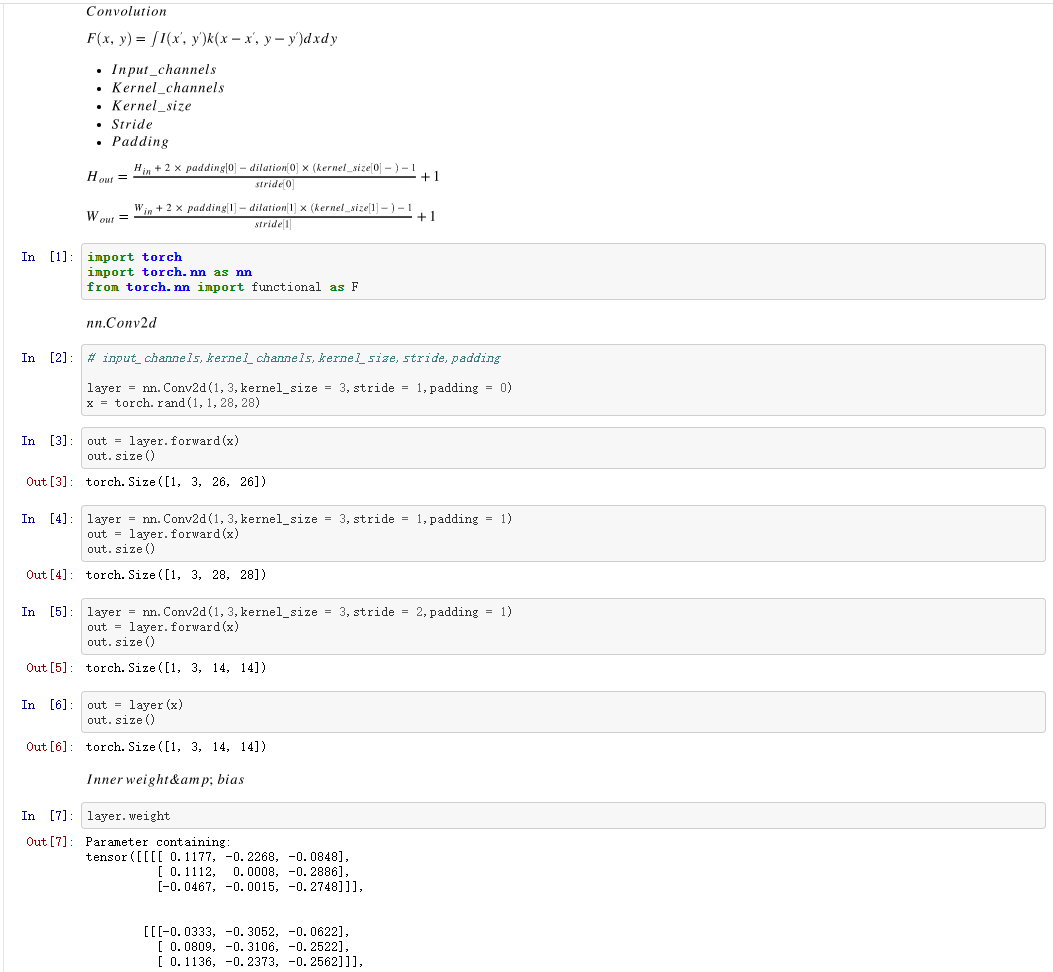
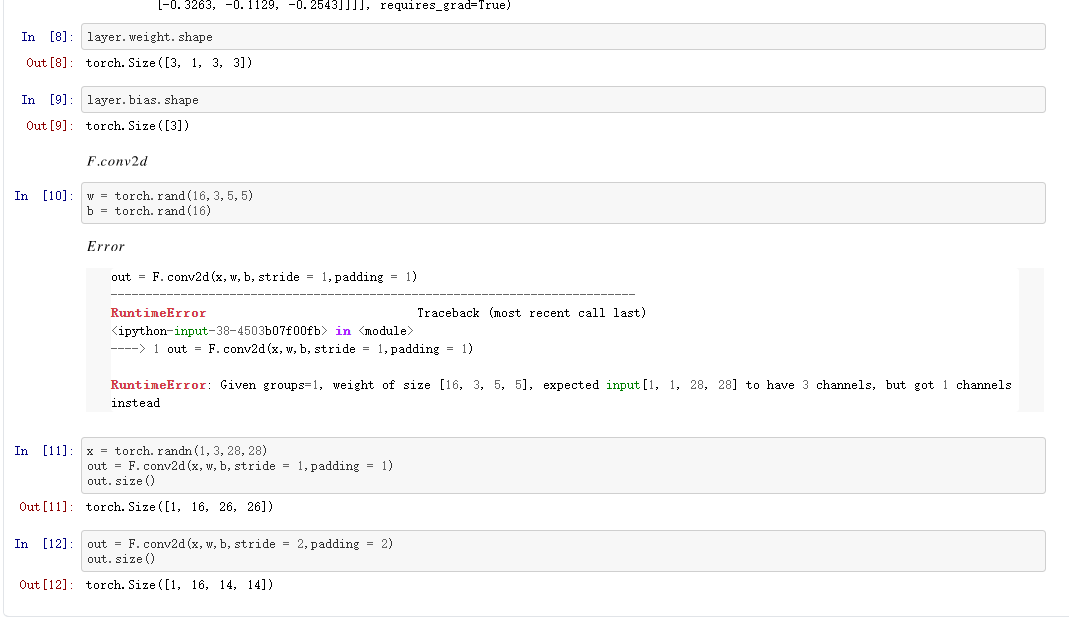
二、pytorch实现
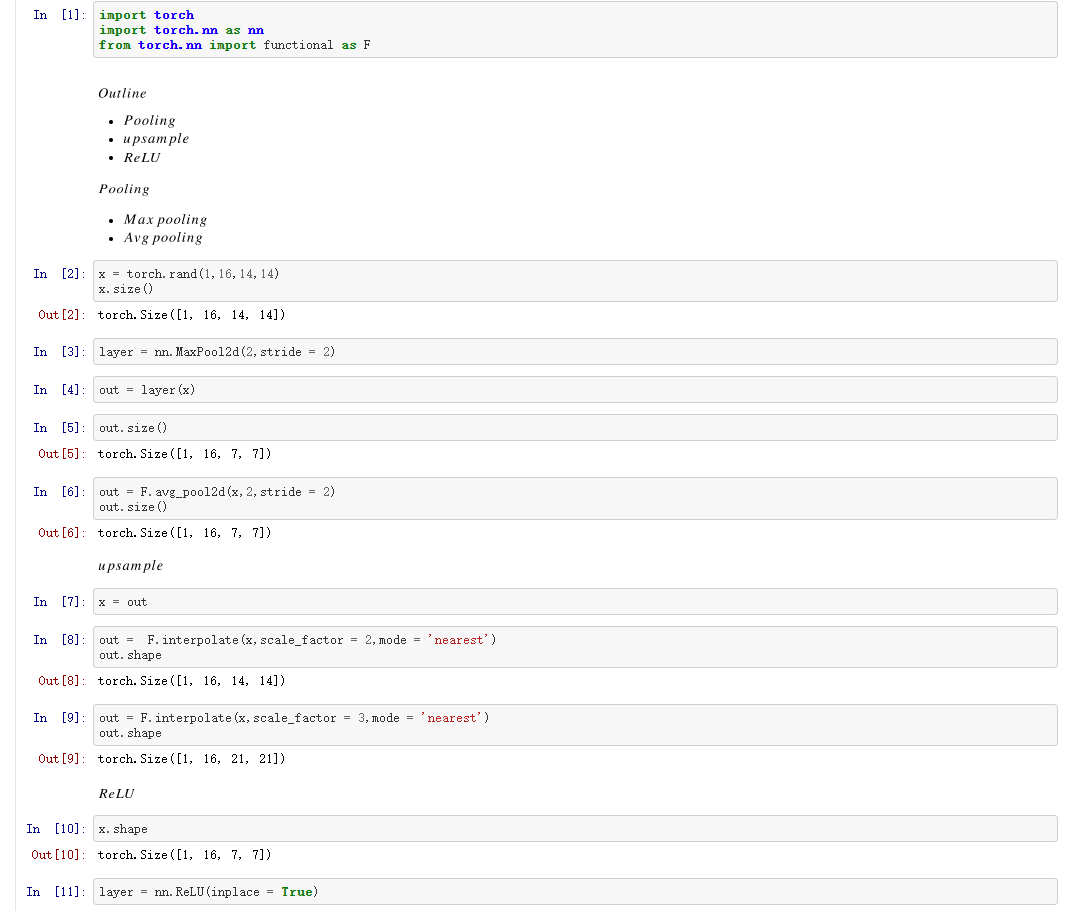
三、Pooling-Sampling
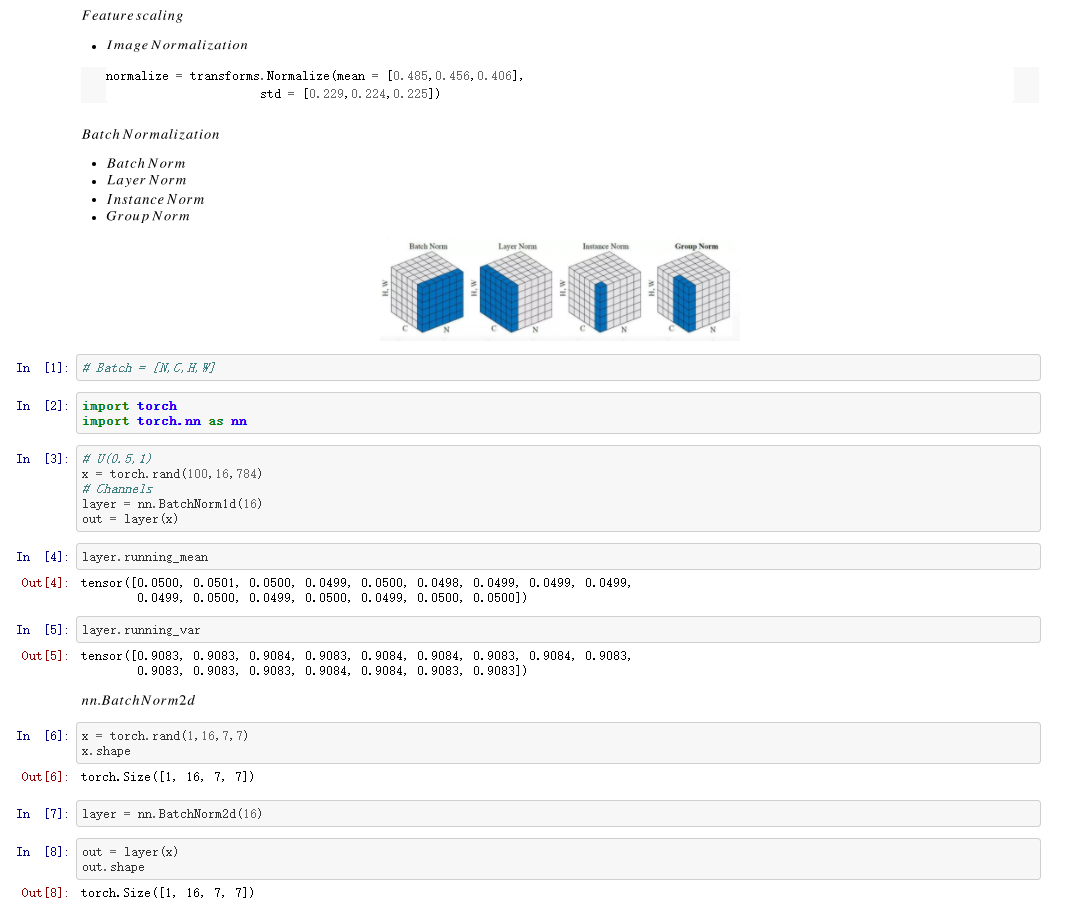
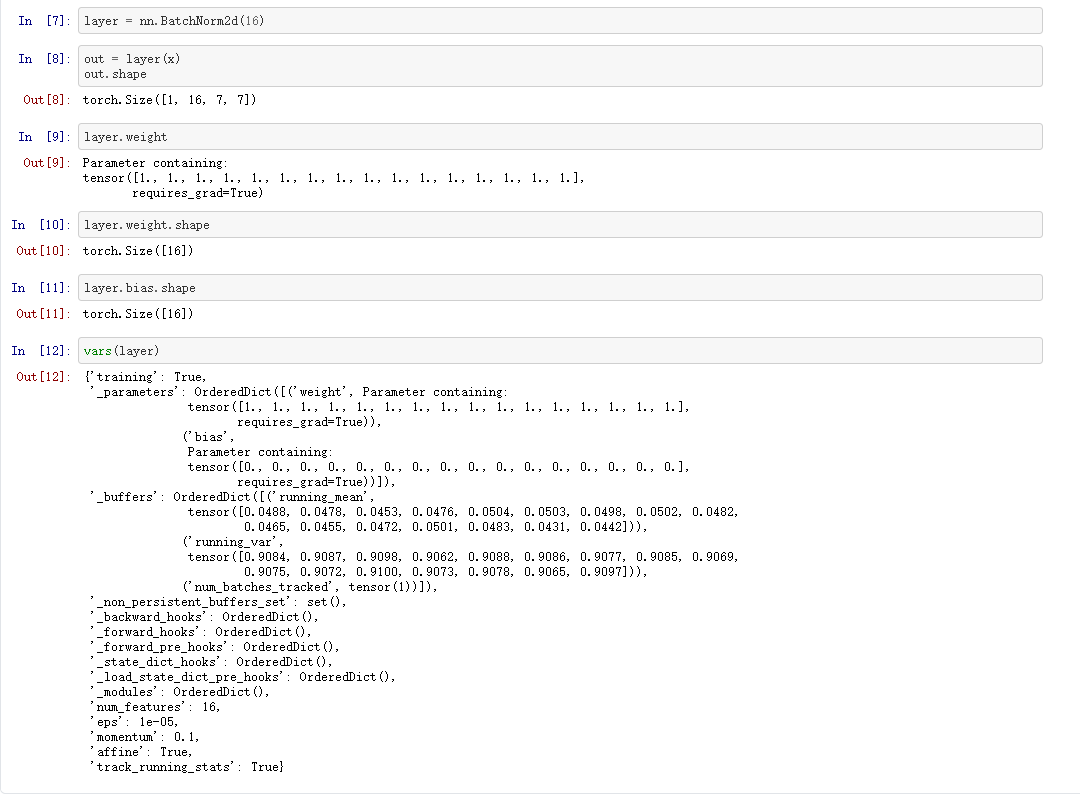
四、BatchNorm
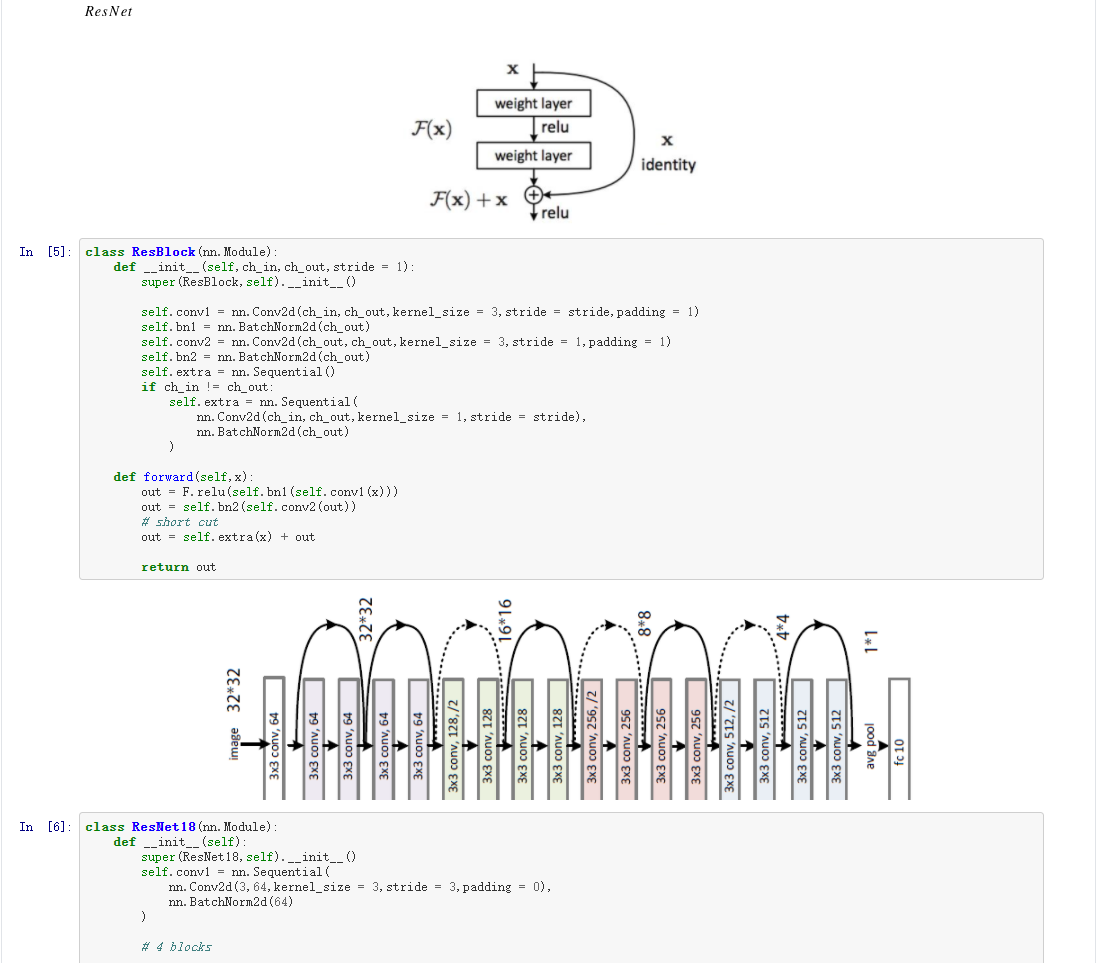
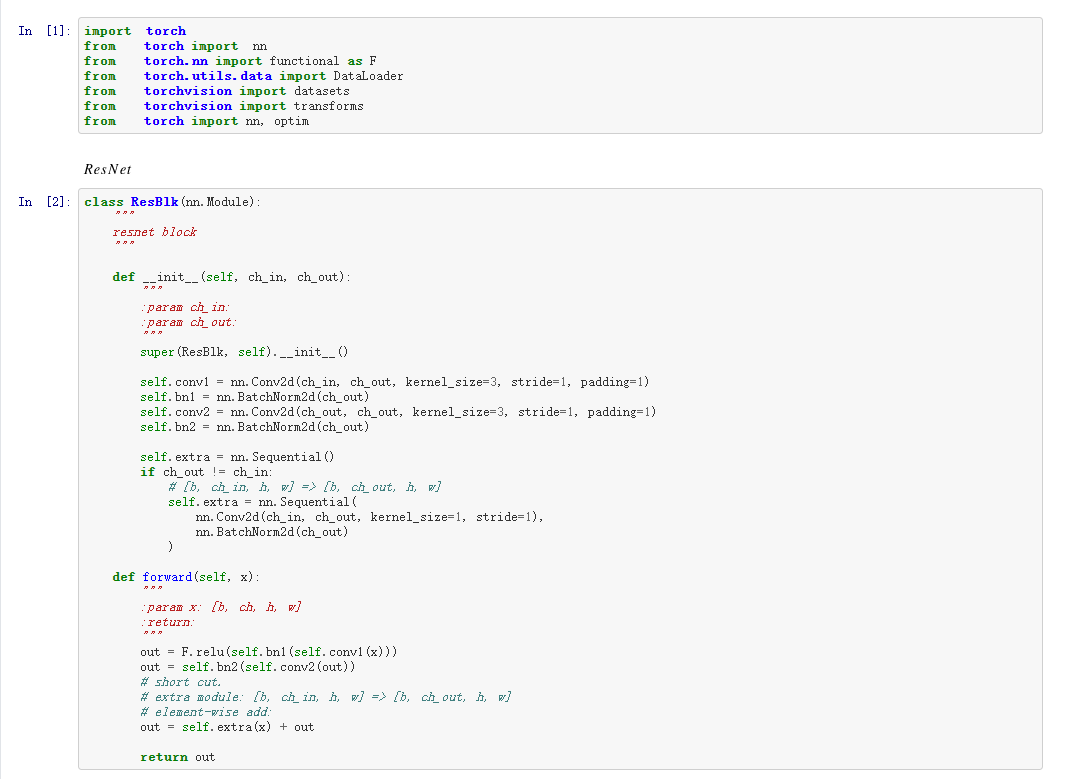
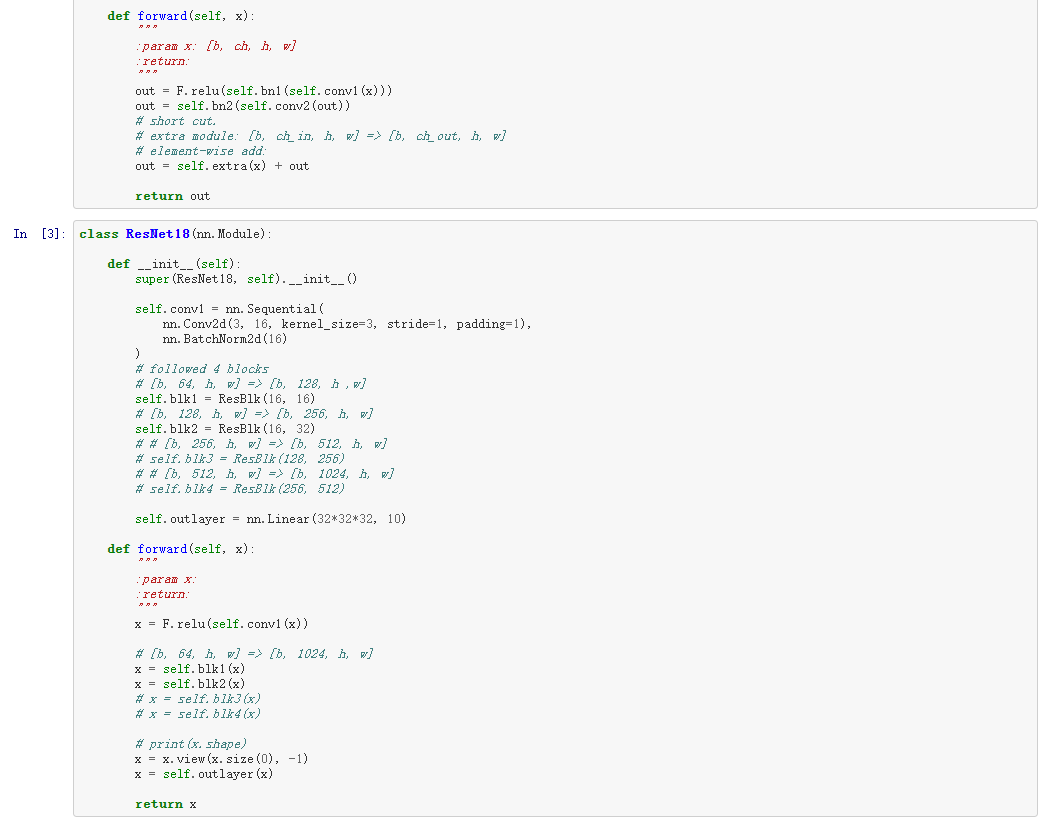
五、ResNet
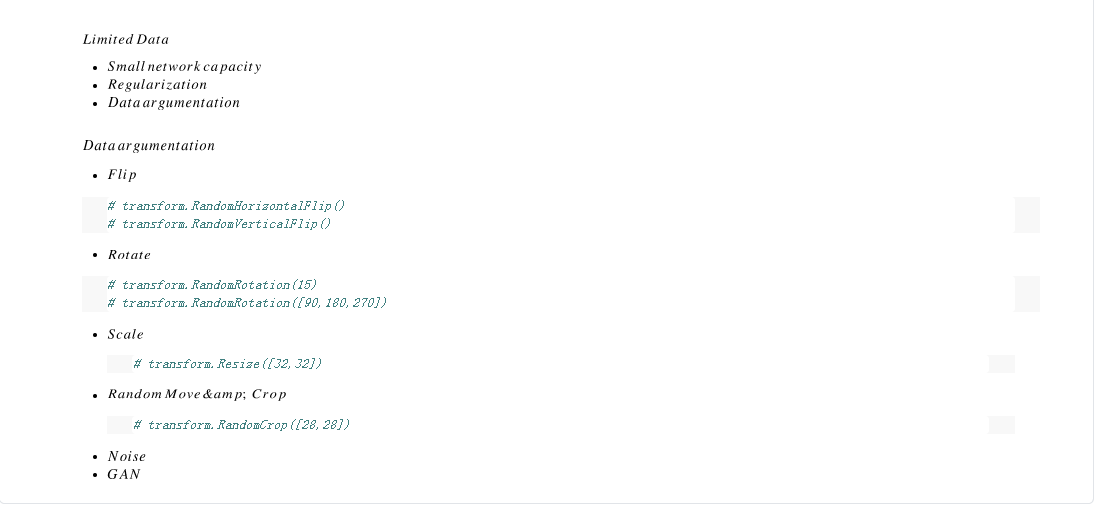
六、数据增强
七、CIFAR10