前言
最短路问题是信息学竞赛中一个十分重要的问题。在非常多的题目和其他算法、数据结构中都有涉及。最短路算法也是信息学竞赛中的一个难点,对思维能力和代码能力有极大考验和锻炼。目前在网络上没有一个非常完整的最短路详解,各个算法书中也缺乏一些详细的图像和代码来解释,更缺少一些特殊优化及时间复杂度和正确性的详解或证明。本文尝试弥补这些信息的缺失,将会详尽地展示最短路算法的定义、思路、实现、优化和证明等内容。
阅读本文的前置知识:
- 基础数据结构与算法
- 搜索算法
- 图的概念,建立、存储、遍历
- 动态规划基础思想
定义
(G) 为一张带权有向图,其中 (V) 为其点集合,(E) 为其边集合。
(|V|) 和 (|E|) 分别为点数和边数。
令 (n=|V|) ,(m=|E|) 。
最短路
定义
给定一张有向带权图 (G) ,其中节点以 ([1, n]) 之间的连续整数编号,求以节点 (1) 为起点,到终点 (n) 的最短的路径的长度
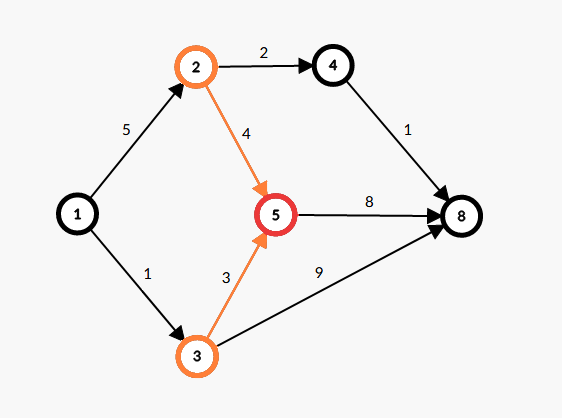
简单来说,就是求一张图中以 (1) 为起点,(n) 为终点的最短的一条路径的长度,如下图的最短路即为由 (1) 为起点,(8) 为终点的最短路径:(1 ightarrow2 ightarrow4 ightarrow8) ,其路径长度为 (5+2+1=8) ,小于图中其余的任何路径(如路径(1 ightarrow3 ightarrow8) ,长度为 (1+9=10) )。
单源最短路
单源最短路问题(Single Source Shortest Path):给定一张有向带权图 (G) ,求其以 (1) 为起点,到其余每个点的最短路
Bellman-Ford 算法
由理查德·贝尔曼(Richard Bellman)和莱斯特·福特提出的最短路算法
算法思路
要求单源最短路,我们定义 (operatorname{dis}[x]) 表示由 (1) 到 (x) 的最短路的长度。
设有一条边 (u ightarrow v) ,其权值为 (w) ,假设我们已经知道了 (1) 到 (u) 的最短路 (operatorname{dis}[u]) ,那么到达 (v) 且经过 (u) 的最短路 (operatorname{dis}[v]) 就应该是 (operatorname{dis}[u]+w) ,枚举每一条到 (v) 的边 (u ightarrow v) ,那么 (operatorname{dis}[v]=operatorname{min}{operatorname{dis}[u] + w}) 。
如下图,(operatorname{dis}[5]=operatorname{max}(operatorname{dis}[2]+4,operatorname{dis}[3]+3)) 。
我们称上操作为“松弛操作”。这种操作与动态规划中的许多做法十分相像。
那么,我们只要再知道边界就可以求出整个 (operatorname{dis}) 数组了。不难看出,从 (1) 到 (1) 自身的最短路的长度应为 (0) ,即 (operatorname{dis}[1]=0) 。所以我们只要一直进行松弛操作直到无法再进行松弛即可。
算法流程
- 枚举所有边 (u ightarrow v) ,进行松弛操作。
- 重复上操作,直到没有松弛更新的发生。
算法实现
struct edge // 一条边上的点 u、点 v、边权 w
{
int u;
int v;
int w;
};
vector<edge> e; // vector 存边方法存图
int dis[MAX]; // 最短路长度
void Bellman_Ford()
{
// 初始化为无穷大
for (int i = 0; i < MAX; i++)
dis[i] = INF;
dis[1] = 0; // 边界
while (1)
{
bool relaxable = false;
// edge存边,edge.size() 即为 m
for (int i = 0; i < edge.size(); i++)
{
// 松弛操作
if (dis[edge[i].v] > dis[edge[i].u] + w)
{
dis[edge[i].v] = dis[edge[i].u] + w;
// 记录是否有进行松弛操作
flag = true;
}
}
// 若没有进行松弛操作,说明dis已经更新完成,退出
if (relaxable == false)
break;
}
}
注:有许多关于 Bellman-Ford 的文章都使用了类似下面的代码——使用双重循环,在第一层中循环 (n) 次。笔者认为其虽简洁,但违背了算法的本意,且拖慢了效率。
void Bellman_Ford()
{
for (int i = 0; i < MAX; i++)
dis[i] = INF;
dis[1] = 0;
for (int i = 1; i <= n; i++)
for (int j = 1; j <= m; j++)
if (dis[edge[j].v] > dis[edge[j].u] + w)
dis[edge[j].v] = dis[edge[j].u] + w;
}
}
算法复杂度
因为在图 (G) 中有 (n) 个点,所以图中的最短路上的点数至多有 (n) 个(否则出现负环,不存在最短路,详见后文)。又因为在每轮遍历所有边时,所有最短路上至少有一个点的 (operatorname{dis}) 被确定了,所以最坏情况下枚举所有边的操作需要被运行 (n) 次。如下图为 (operatorname{dis}) 确定的顺序。(红点为更新过的点)
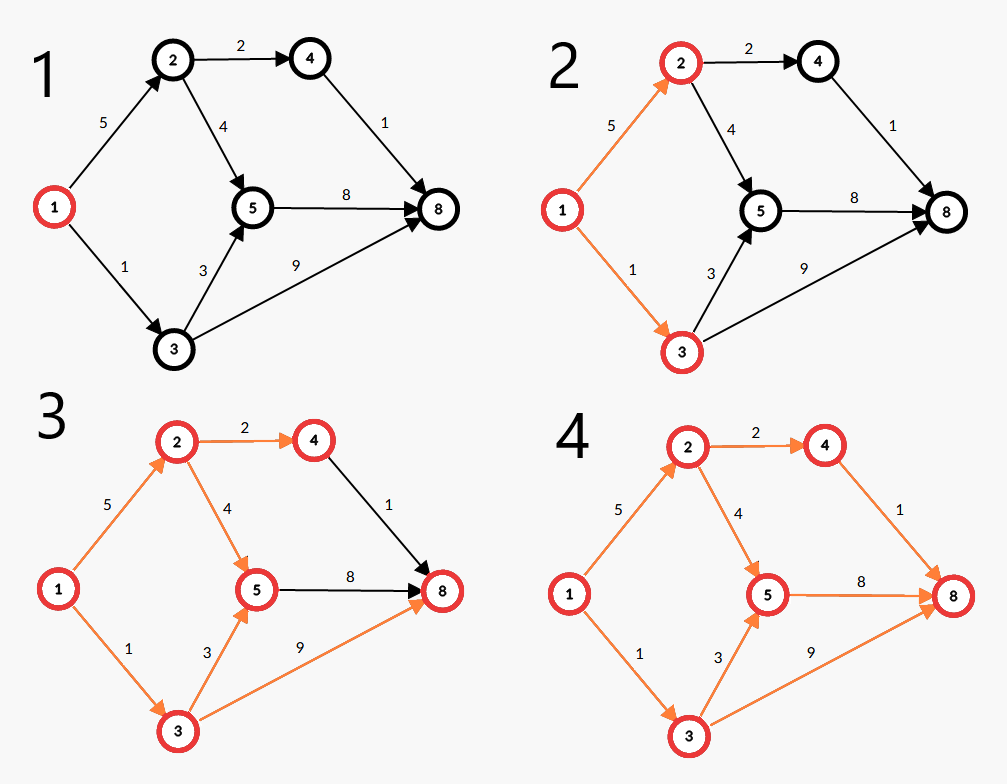
这意味着 Bellman-Ford 的时间复杂度为(点数 imes 边数): (O(|V||E|)) 即 (O(nm)) ,复杂度较高,十分稳定,一秒大约能处理不足 (1000) 个点。
SPFA 算法
SPFA 算法(Shortest Path Fast Algorithm 最短路快速算法):Bellman_Ford 的优化
算法思路
在前文 Bellman-Ford 算法中,使用了枚举边进行松弛操作来求出 (operatorname{dis}) 数组。而在分析其算法时间复杂度时,可以看出一个 Bellman-Ford 有很多重复的计算。在确定了靠近起点的点的 (operatorname{dis}) 值后,之后的枚举重复计算了已经确定的 (operatorname{dis}) 值。实际上我们无需关注之前的 (operatorname{dis}) 值,只要知道连向当前点的节点的 (operatorname{dis}) 值就足够了。
就此问题,我们可以对其进行优化。我们发现,(operatorname{dis}) 的确定顺序和 BFS 搜索的顺序相同,我们可以使用 BFS 优化 Bellman-Ford 算法。
只需从起点开始,BFS 搜索,搜索到一个点后松弛更新它连接到的所有点,出 (operatorname{dis}) 数组的值。
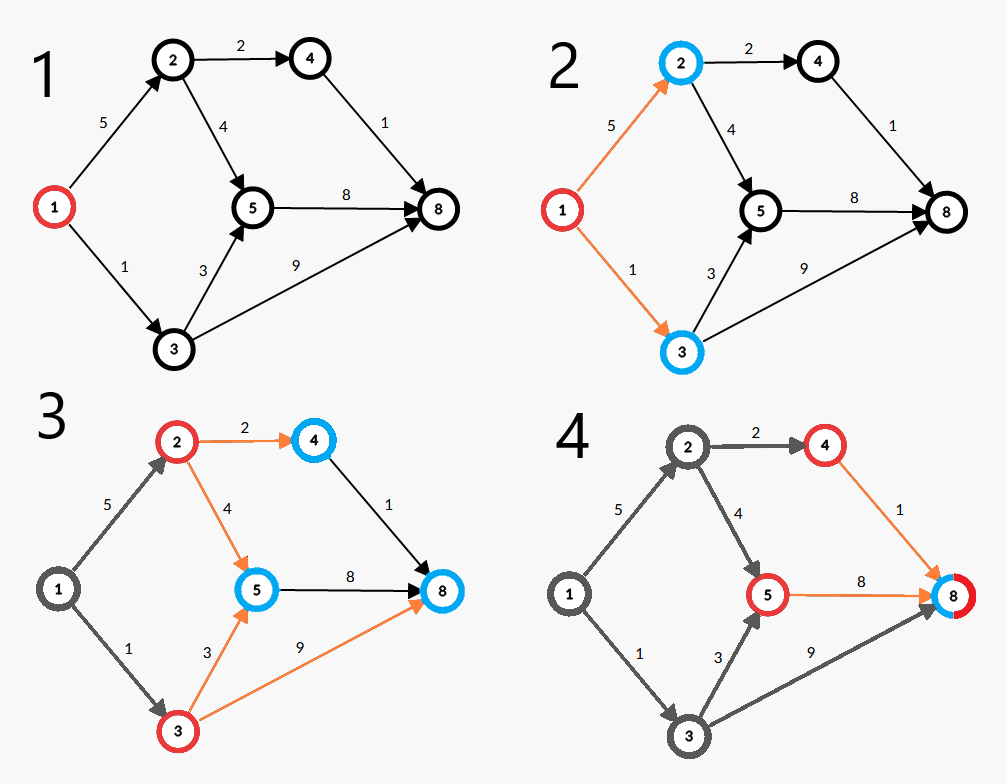
如下图,即为 SPFA 算法的更新方法。(红点:在队列中的点;蓝点:被更新的点;灰点:确定了(operatorname{dis}) 值的点)
算法流程
- 新建一个队列 (q) 用于进行 BFS 搜索,开始搜索前队列中只有起始点 (1),建立 (operatorname{inque}) 哈希表,表示某个点是否在队列中。
- 进行 BFS 搜索,每次取出队列头 (u),枚举所有从 (u) 出发的边 (u ightarrow v) ,对 (v) 进行松弛操作(若 (operatorname{dis}[v] > operatorname{dis}[u] + w) 则 (operatorname{dis}[v] = operatorname{dis}[u] + w))同时若 (v) 不在队列中,则使 (v) 入队。
- 重复上述操作直至队列为空,搜索结束。
算法实现
struct node // 邻接表 u 的对应点 v 和边权 w
{
int v;
int w;
};
vector<node> g[MAX]; // vector 邻接表存图
bool inque[MAX]; // 队列状态哈希表
int dis[MAX]; // 最短路长度
void SPFA()
{
// 初始化为无穷大
for (int i = 0; i < MAX; i++)
dis[i] = INF;
dis[1] = 0; // 边界
queue<int> q; // 创建队列
q.push(1); // 初始化队列
inque[1] = true; // 记录 inque 状态
while (!q.empty()) // 执行 BFS 直到队列为空
{
int u = q.front(); // 取出队头
q.pop(); // 弹出队头
inque[u] = false; // 去除 inque 记录
// 枚举被松弛的点 v
for (int i = 0; i < g[u].size(); i++)
{
int v = g[u][i].v;
int w = g[u][i].w;
// 松弛操作
if (dis[u] + w < dis[v])
{
dis[v] = dis[u] + w;
// 入队
if (!inque[v])
{
inque[v] = true;
q.push(v);
}
}
}
}
}
算法复杂度
SPFA 算法的主要核心为 BFS 搜索,遍历所有的点,但也会重复更新一定的点,时间复杂度大约为 (O(k|E|)) (即(O(km)))其中 (k) 为常数,(k) 在稀疏图中约为 (2) 但在稠密图中可能会严重退化。在特殊数据中最坏退化到 (O(|V||E|)) ,与 Bellman-Ford 相同,极其不稳定,最佳每秒能处理大约 (50,000,000) 个点,最差仅能处理不足 (1000) 个点。
算法正确性
由于是按照 BFS 搜索顺序在有向图中搜索,对于所有点 (v) ,其对应的边 (u ightarrow v) 中的所有 (u) 在搜索结束前都一定被访问过,所以 (operatorname{dis}[v]) 一定被更新了足够多次,使得满足松弛操作中的式子 (operatorname{dis}[v]=operatorname{min}{operatorname{dis}[u] + w}) 。
算法优化
由于 SPFA 算法的效率波动大,因此产生了许多种优化。
整理自:SPFA算法的玄学方法
基础优化
SLF (Small Label First) 优化
将朴素 SPFA 的队列 queue 替换为双端队列 deque 。在每次插入对位元素 (v) 时,将其与队首进行比较,若 dis[dq.front()] > dis[v] 将 (v) 由队首插入,否则从队尾插入。
deque<int> dq;
dq.push_back(1);
inque[1] = true;
while (!dq.empty())
{
int u = dq.front();
dq.pop_front();
inque[u] = false;
for (int i = 0; i < g[u].size(); i++)
{
int v = g[u][i].v;
int w = g[u][i].w;
if (dis[u] + w < dis[v])
{
dis[v] = dis[u] + w;
if (!inque[v])
{
inque[v] = true;
// 若 dis[dq.front()] > dis[v] 将 v 由队首插入,否则从队尾插入
if (dq.empty() || dis[v] > dis[dq.front()])
dq.push_back(v);
else
dq.push_front(v);
}
}
}
}
SLF 通过将最小的结果放在队列前端,可以更早地更新出节点的最优解,又根据已有的最优解,更快地更新出所有最优解。
LLL (Large Label Last)优化
同样将队列换为双端队列。维护队列中元素 (operatorname{dis}) 的平均值,设为 (k) ,若 dis[v] > k ,从队尾插入,然后继续寻找,直到有 dis[x] <= k 。
LLL 在遇到特殊数据时可能被卡成指数级。
升级优化
容错 SLF
设定容错值 (val) ,当满足 dis[v] > dis[dq.front()] + val 时从队尾插入,否则从队首插入。
mcfx 优化
mcfx 优化 定义区间 ([l,r]) ,当入队节点的入队次数属于这个区间的时候,从队首插入,否则从队尾插入。
Swap-SLF
若队列改变且 dis[dq.front()] > dis[dq.back()] ,交换队首队尾。
if (dis[dq.front()] > dis[dq.back()])
{
int tmp = dq.front();
dq.pop_front();
dq.push_front(dq.back());
dq.pop_back();
dq.push_back(tmp);
}
优化的兼容性
LLL 和 SLF ,
容错 SLF 和 mcfx ,
可以同时使用。
以上多种优化能有一定的常数级优化效果,但在特殊构造的数据下还是会严重退化。
SLF 优化:每次将入队结点距离和队首比较,如果更大则插入至队尾。
Hack:使用链套菊花的方法,在链上用几个并列在一起的小边权边就能欺骗算法多次进入菊花。
LLL 优化:每次将入队结点距离和队内距离平均值比较,如果更大则插入至队尾。
Hack:向 1 连接一条权值巨大的边,这样 LLL 就失效了。
SLF 带容错:每次将入队结点距离和队首比较,如果比队首大超过一定值则插入至队尾。
Hack:卡法是卡 SLF 的做法,并开大边权,总和最好超过 (10^{12})。
mcfx 优化:在第 ([L,R])次访问一个结点时,将其放入队首,否则放入队尾。
Hack:网格图表现优秀,但是菊花图表现很差。
SLF + swap:每当队列改变时,如果队首距离大于队尾,则交换首尾。
Hack: 与卡 SLF 类似,外挂诱导节点即可。
——知乎用户 in 如何看待 SPFA 算法已死这种说法?
其他优化
改变数据结构
使用 priority_queue 代替 queue 或使用 zkw 线段树
随机化
- 边序随机 将边随机打乱后进行 SPFA。
- 队列随机 每个节点入队时,以 (frac{1}{2}) 的概率从队首入队,(frac{1}{2}) 的概率从队尾入队。
- 队列随机优化版 每 (C) 次入队后,将队列元素随机打乱。
随机化可以加快数学期望上的时间复杂度,但对于渐进上界 (O) 记号来讲没有改变,这种做法只能在竞赛中让 SPFA 算法勉强躲过构造的数据。
Dijkstra 算法
迪杰斯特拉算法(Dijkstra)由荷兰计算机科学家狄克斯特拉于1959 年提出。Dijkstra 算法只在非负权有向图中适用(SPFA 可以在所有有向图中使用)。
算法思路
Dijkstra 算法的基本思路是贪心。Dijkstra 同样引入 (operatorname{dis}) 数组,表示点到原点的最短路的长度。同时,Dijkstra 维护一个确定了 (operatorname{dis}) 值的点的集合 (C) 。
在 Bellman-Ford / SPFA 中,用遍历边的方式,松弛更新每个点的 (operatorname{dis}) 值。而在 Dijkstra 中,用贪心的方法可以尽快确定 (operatorname{dis}) 值,减少无用操作。贪心的方法十分简单,每次寻找不在集合 (C) 中 (operatorname{dis}) 值最小的点 (u) ,枚举所有边 (u ightarrow v) ,松弛更新 (operatorname{dis}[v]) 。
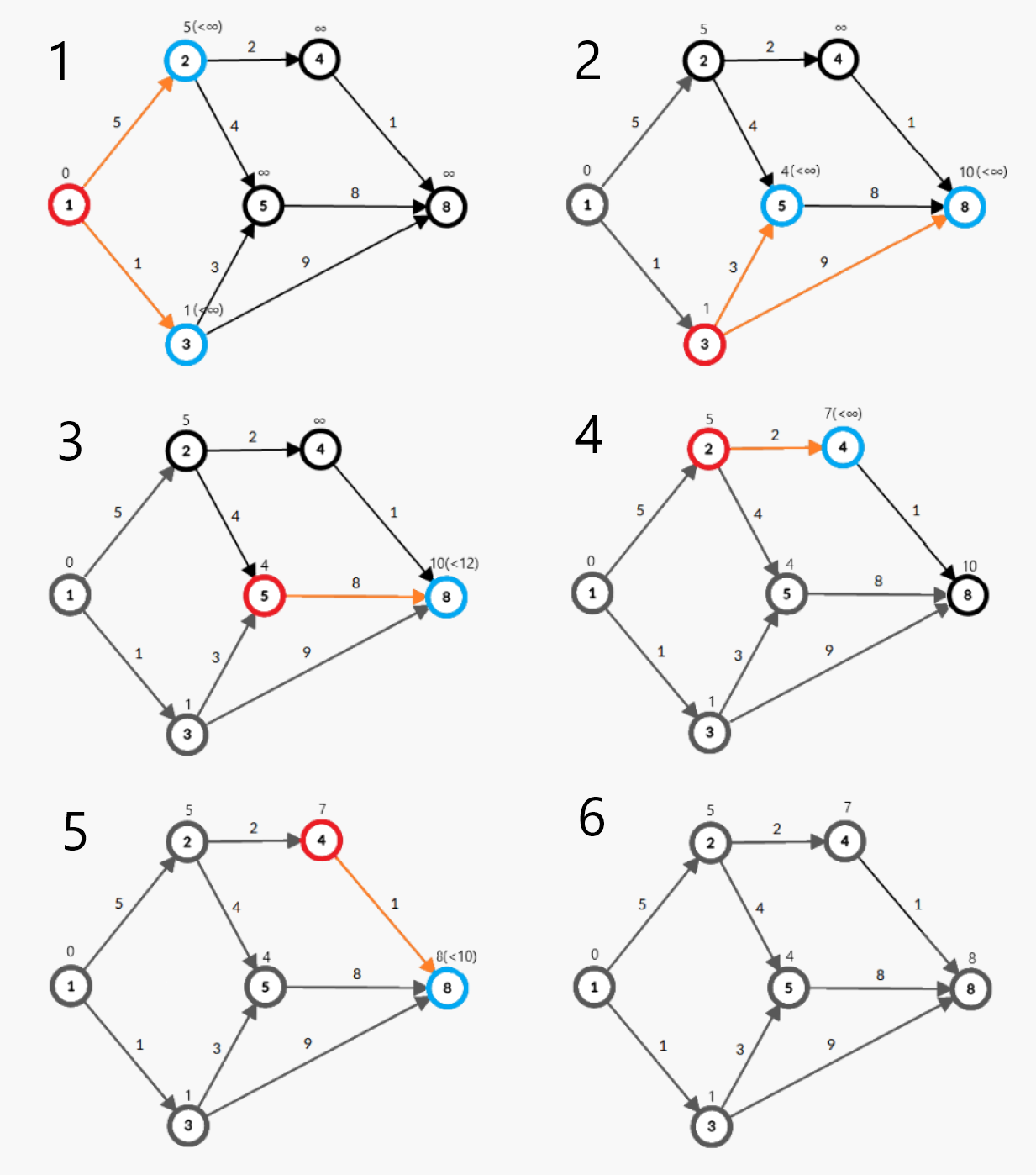
如下图所示,即为 Dijkstra 算法的模拟。(红点:点 (u) ,橙边:边 (u ightarrow v) ,蓝点:点 (v) ,灰点:在集合 (C) 中的点)
算法流程
- 初始化 (operatorname{dis}[1]=0) ,其余 (operatorname{dis}) 为 (infin) 。
- 找到不在确定 (operatorname{dis}) 集合 (C) 中 (operatorname{dis}) 值最小的点 (u) 。
- 枚举所有 (u) 的出边 (u ightarrow v) 。
- 松弛更新点 (v) ,若
dis[v] > dis[u] + w,则使dis[v] = dis[u] + w。 - 重复 ([2,3,4]) 步,直到 (C=V) ((V) 为图 (G) 的点集)。
算法实现
struct node // 邻接表 u 的对应点 v 和边权 w
{
int v;
int w;
};
vector<node> g[MAX]; // vector 邻接表存图
bool vis[MAX]; // 已确定 dis 值的点集 C, vis[x] 为 true 表示在集合中
int dis[MAX]; // 最短路长度
void Dijkstra()
{
// 初始化为无穷大
for (int i = 0; i < MAX; i++)
dis[i] = INF;
dis[1] = 0;
// 由于每次确定一个点的 dis 值,所以需要循环 n 次才使得 C = V
// 从算法思路中的图可以看出
for (int i = 0; i < n; i++)
{
int u = 0;
// 枚举所有点,寻找不在集合 C 中 dis 值最小的点
for (int j = 1; j <= n; j++)
if (!vis[j] && (u == 0 || dis[j] < dis[u]))
u = j;
// 将找到的点 u 加入集合 C
vis[u] = true;
// 枚举 u 的出边 u -> v ,进行松弛更新
for (int j = 0; j < g[u].size(); j++)
{
int v = g[u][j].v;
int w = g[u][j].w;
if (!vis[v] && dis[u] + w < dis[v])
dis[v] = dis[u] + w;
}
}
}
算法复杂度
由上方代码容易看出,我们需要循环 (n) 次,在循环内每次枚举所有的点,再枚举所有的出边。
循环 (n) 次,每次遍历所有的点需要 (n^2) 次,每次枚举出边共需要 (m) 次。所以 Dijkstra 算法的时间复杂度为 (|V|^2+|E|) ,又因为 (|E|) 的值最大为所有点均相互连边的边数,即为 (C^2_{|V|}=frac{|V| imes (|V|-1)}{2}<|V|^2) 所以可以将 (|E|) 视为常数。
综上,Dijkstra 算法的时间复杂度应为 (O(|V|^2)) (即 (O(n^2)))。
堆优化
朴素 Dijkstra 的时间复杂度为 (O(n^2)) ,在实际应用中还有很大的常数,运行效率甚至低于 Bellman_Ford(详见下文 5.1, 5.3 算法实际效率测试)。但是 Dijkstra 算法 + 堆优化的效率可以接近 SPFA ,且非常稳定,没有退化风险。是求非负权有向图上单源最短路的主流做法。
优化思路
由 4.3.4 Dijkstra算法复杂度 中的分析,可以发现,朴素 Dijkstra 算法的效率瓶颈在于寻找图中 (operatorname{dis}) 值最小的点。其实我们没有必要每次都遍历所有的点来寻找 (operatorname{dis}) 值最小的。我们可以使用堆,每次只要取出堆顶的点即可。
因为所有确定的点(在集合 (C) 中的点)不会被作为前文 Dijkstra 中的点 (u) 即前文图中的红点使用,而其余没有变为蓝点过,即没有被进行松弛更新的点的 (operatorname{dis}) 值都为 (infin) 。所以只有被松弛更新过,且不在集合 (C) 中的点可能是 (operatorname{dis}) 值最小的点 (u) 。
所以我们可以使用类似 BFS 的方法,在每次进行松弛更新时把点放入堆中。
优化实现
在 C++ 中,我们可以使用 STL 中的 priority_queue 代替堆,相较于手写堆方便很多。
值得注意的是,用堆记录最小 (operatorname{dis}) 值的点时,我们要将点按 (operatorname{dis}) 值排序,导致点自身的序号顺序被打乱,需要专门记录,且需要自己在结构体 / 类中重载比较符号。当然,也可以使用 STL 中的 pair 。
struct node
{
int v;
int w;
};
struct data
{
int dis; // 用于在优先队列中找出所有点中 dis 值最小的点
int num; // 用于记录这个点的编号
// 重载符号 >
bool operator>(const data x) const
{
if (this->dis != x.dis)
return this->dis > x.dis;
return this->num > x.num;
}
};
vector<node> g[MAX];
bool vis[MAX];
int dis[MAX];
void Dijkstra()
{
// 初始化为无限大
for (int i = 0; i < MAX; i++)
dis[i] = INF;
dis[1] = 0;
// 声明优先队列,相当于小根堆
priority_queue<data, vector<data>, greater<data>> pq;
pq.push((data){0, 1}); // 初始化优先队列,插入起点
while (!pq.empty())
{
// 取出堆顶
int u = pq.top().num;
pq.pop();
// u 不可以在集合 C 中
if (vis[u])
continue;
vis[u] = true; // 将 u 加入集合 C
for (int i = 0; i < g[u].size(); i++)
{
int v = g[u][i].v;
int w = g[u][i].w;
// 松弛操作
if (!vis[v] && dis[u] + w < dis[v])
{
dis[v] = dis[u] + w;
// 将有可能是所有点中 dis 值最小的点加入堆中
pq.push((data){dis[v], v});
}
}
}
}
pair 写法:
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
pq.push(make_pair(0, s));
int u = pq.top().second;
pq.push(make_pair(dis[v], v));
算法实际效率测试
洛谷 P4779 ,C++11 O2 测试结果
共 6 个数据点
Bellman-Ford
Bellman-Ford: 6.07s
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| TLE | TLE | TLE | TLE | AC | TLE |
SPFA
朴素 SPFA: 5.00s
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| TLE | TLE | TLE | AC | AC | TLE |
SPFA + SLF: 4.76s
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| AC | TLE | TLE | AC | AC | TLE |
SPFA + SLF + LLL: 6.10s
注:由于此题卡 SPFA ,LLL 优化被卡成指数级别了
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| TLE | TLE | TLE | TLE | AC | TLE |
SPFA + 容错 SLF + mcfx: 515ms
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| AC | AC | AC | AC | AC | AC |
SPFA + SLF + Swap-SLF: 3.92s
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| AC | TLE | TLE | AC | AC | TLE |
SPFA + 优先队列: 2.79s
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| TLE | AC | AC | AC | AC | TLE |
SPFA + 队列随机: 4.95s
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| TLE | TLE | TLE | AC | AC | TLE |
Dijkstra
朴素 Dijkstra: 7.20s
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| TLE | TLE | TLE | TLE | TLE | TLE |
Dijkstra + 堆优化: 660ms
| #1 | #2 | #3 | #4 | #5 | #6 |
|---|---|---|---|---|---|
| AC | AC | AC | AC | AC | AC |