哈弗结构
哈佛结构是一种存储器并行体系结构,主要特点是将程序和数据存储在不同的存储空间中,即程序存储器和数据存储器是两个独立的存储器,每个存储器独立编址、独立访问。CPU首先到程序指令存储器中读取程序指令内容,解码后得到数据地址,再到相应的数据存储器中读取数据,并进行下一步的操作(通常是执行)。程序指令存储和数据存储分开,可以使指令和数据有不同的数据宽度。

特点
与两个存储器相对应的是系统的4条总线:程序的数据总线与地址总线,数据的数据总线与地址总线。这种分离的程序总线和数据总线可允许在一个机器周期内同时获得指令字(来自程序存储器)和操作数(来自数据存储器),从而提高了执行速度,提高了数据的吞吐率。又由于程序和数据存储器在两个分开的物理空间中,因此取指和执行能完全重叠。
哈佛结构的计算机由CPU、程序存储器和数据存储器组成,程序存储器和数据存储器采用不同的总线,从而提供了较大的存储器带宽,使数据的移动和交换更加方便,尤其提供了较高的数字信号处理性能。
哈佛结构的微处理器通常具有较高的执行效率。其程序指令和数据指令分开组织和存储的,执行时可以预先读取下一条指令。
哈佛结构的微处理器通常具有较高的执行效率。其程序指令和数据指令分开组织和存储的,执行时可以预先读取下一条指令。
哈佛结构是指程序和数据空间独立的体系结构,目的是为了减轻程序运行时的访存瓶颈。例如最常见的卷积运算中,一条指令同时取两个操作数,在流水线处理时,同时还有一个取指操作,如果程序和数据通过一条总线访问,取指和取数必会产生冲突,而这对大运算量的循环的执行效率是很不利的。
哈佛结构能基本上解决取指和取数的冲突问题.而对另一个操作数的访问,就只能采用Enhanced哈佛结构了,例如像TI那样,数据区再split,并多一组总线.或向AD那样,采用指令cache,指令区可存放一部分数据.。
比较
哈佛结构与冯.诺曼结构处理器相比,处理器有两个明显的特点:使用两个独立的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存,以便实现并行处理;具有一条独立的地址总线和一条独立的数据总线,利用公用地址总线访问两个存储模块(程序存储模块和数据存储模块),公用数据总线则被用来完成程序存储模块或数据存储模块与CPU之间的数据传输。两条总线由程序存储器和数据存储器分时共用。
冯·诺依曼结构
冯·诺依曼结构也称普林斯顿结构,是一种将程序指令存储器和数据存储器合并在一起的存储器结构。程序指令存储地址和数据存储地址指向同一个存储器的不同物理位置,因此程序指令和数据的宽度相同,如英特尔公司的8086中央处理器的程序指令和数据都是16位宽。
特点
冯.诺依曼结构处理器具有以下几个特点:
功能
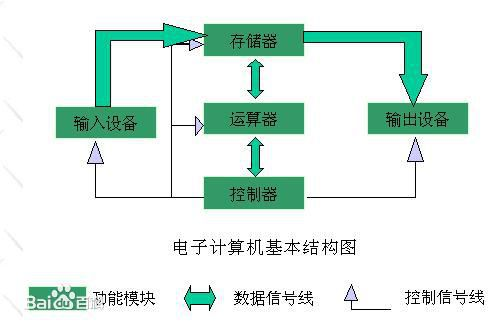
根据冯·诺依曼体系结构构成的计算机,必须具有如下功能:
把需要的程序和数据送至计算机中。
必须具有长期记忆程序、数据、中间结果及最终运算结果的能力。
能够完成各种算术、逻辑运算和数据传送等数据加工处理的能力。
能够按照要求将处理结果输出给用户。
为了完成上述的功能,计算机必须具备五大基本组成部件,
包括:
输入数据和程序的输入设备;
记忆程序和数据的存储器;
完成数据加工处理的运算器;
控制程序执行的控制器;
输出处理结果的输出设备。
瓶颈
将CPU与内存分开并非十全十美,反而会导致所谓的冯·诺伊曼瓶颈(von Neumann bottleneck):在CPU与内存之间的流量(资料传输率)与内存的容量相比起来相当小,在现代电脑中,流量与CPU的工作效率相比之下非常小,在某些情况下(当CPU需要在巨大的资料上执行一些简单指令时),资料流量就成了整体效率非常严重的限制。CPU将会在资料输入或输出内存时闲置。由于CPU速度以及内存容量的成长速率远大于双方之间的流量,因此瓶颈问题越来越严重。而冯·诺伊曼瓶颈是约翰·巴科斯在1977年ACM图灵奖得奖致词时第一次出现,根据巴科斯所言:
“……确实有一个变更储存装置的方法,比借由冯·诺伊曼瓶颈流通大量资料更为先进。瓶颈这词不仅是对于问题本身资料流量的叙述,更重要地,也是个使我们的思考方法局限在‘一次一字符’模式的智能瓶颈。它使我们怯于思考更广泛的概念。因此编程成为一种计划与详述通过冯·诺伊曼瓶颈的字符资料流,且大部分的问题不在于资料的特征,而是如何找出资料。”
在CPU与内存间的快取内存抒解了冯·诺伊曼瓶颈的效能问题。另外,分支预测(branch predictor)算法的建立也帮助缓和了此问题。巴科斯在1977年论述的“智能瓶颈”已改变甚多。且巴科斯对于此问题的解决方案并没有造成明显影响。现代的函数式编程以及面向对象编程已较少执行如早期Fortran一般会“将大量数值从内存搬入搬出的操作”,但平心而论,这些操作的确占用电脑大部分的执行时间。
结构
1945年,冯·诺依曼首先提出了“存储程序”的概念和二进制原理,后来,人们把利用这种概念和原理设计的电子计算机系统统称为“冯·诺依曼型结构”计算机。冯·诺依曼结构的处理器使用同一个存储器,经由同一个总线传输。
冯·诺曼结构处理器具有以下几个特点:必须有一个存储器;必须有一个控制器;必须有一个运算器,用于完成算术运算和逻辑运算;必须有输入和输出设备,用于进行人机通信。
哈佛结构
哈佛结构是一种将程序指令存储和数据存储分开的存储器结构。中央处理器首先到程序指令存储器中读取程序指令内容,解码后得到数据地址,再到相应的数据存储器中读取数据,并进行下一步的操作(通常是执行)。程序指令存储和数据存储分开,可以使指令和数据有不同的数据宽度,如Microchip公司的PIC16芯片的程序指令是14位宽度,而数据是8位宽度。
哈佛结构的微处理器通常具有较高的执行效率。其程序指令和数据指令分开组织和存储的,执行时可以预先读取下一条指令。使用哈佛结构的中央处理器和微控制器有很多,除了上面提到的Microchip公司的PIC系列芯片,还有摩托罗拉公司的MC68系列、Zilog公司的Z8系列、ATMEL公司的AVR系列和ARM公司的ARM9、ARM10和ARM11。
哈佛结构是指程序和数据空间独立的体系结构,目的是为了减轻程序运行时的访存瓶颈。
例如最常见的卷积运算中, 一条指令同时取两个操作数, 在流水线处理时, 同时还有一个取指操作,如果程序和数据通过一条总线访问,取指和取数必会产生冲突,而这对大运算量的循环的执行效率是很不利的。哈佛结构能基本上解决取指和取数的冲突问题。而对另一个操作数的访问,就只能采用Enhanced哈佛结构了,例如像TI那样,数据区再split,并多一组总线。或向AD那样,采用指令cache,指令区可存放一部分数据。
在DSP算法中,最大量的工作之一是与存储器交换信息,这其中包括作为输入信号的采样数据、滤波器系数和程序指令。例如,如果将保存在存储器中的2个数相乘,就需要从存储器中取3个二进制数,即2个要乘的数和1个描述如何去做的程序指令。DSP内部一般采用的是哈佛结构,它在片内至少有4套总线:程序的数据总线,程序的地址总线,数据的数据总线和数据的地址总线。这种分离的程序总线和数据总线,可允许同时获取指令字(来自程序存储器)和操作数(来自数据存储器),而互不干扰。这意味着在一个机器周期内可以同时准备好指令和操作数。有的DSP芯片内部还包含有其他总线,如DMA总线等,可实现单周期内完成更多的工作。这种多总线结构就好像在DSP内部架起了四通八达的高速公路,保障运算单元及时地取到需要的数据,提高运算速度。因此,对DSP来说,内部总线是个资源,总线越多,可以完成的功能就越复杂。超级哈佛结构(superHarvard architecture,缩写为SHARC),它在哈佛结构上增加了指令cache(缓存)和专用的I/O控制器。
哈佛结构处理器有两个明显的特点:使用两个独立的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存;使用独立的两条总线,分别作为CPU与每个存储器之间的专用通信路径,而这两条总线之间毫无关联。
改进的哈佛结构,其结构特点为:以便实现并行处理;具有一条独立的地址总线和一条独立的数据总线,利用公用地址总线访问两个存储模块(程序存储模块和数据存储模块),公用数据总线则被用来完成程序存储模块或数据存储模块与CPU之间的数据传输。
两者区别
冯·诺依曼理论的要点是:数字计算机的数制采用二进制;计算机应该按照程序顺序执行。人们把冯诺依曼的这个理论称为冯诺依曼体系结构。从ENIAC到当前最先进的计算机都采用的是冯诺依曼体系结构。所以冯诺依曼是当之无愧的数字计算机之父。
根据冯诺依曼体系结构构成的计算机,必须具有如下功能:把需要的程序和数据送至计算机中;必须具有长期记忆程序、数据、中间结果及最终运算结果的能力;能够完成各种算术、逻辑运算和数据传送等数据加工处理的能力;能够根据需要控制程序走向,并能根据指令控制机器的各部件协调操作;能够按照要求将处理结果输出给用户。
哈佛结构是为了高速数据处理而采用的,因为可以同时读取指令和数据(分开存储的)。大大提高了数据吞吐率,缺点是结构复杂。通用微机指令和数据是混合存储的,结构上简单,成本低。假设是哈佛结构:你就得在电脑安装两块硬盘,一块装程序,一块装数据,内存装两根,一根储存指令,一根存储数据……
是什么结构要看总线结构的。51单片机虽然数据指令存储区是分开的,但总线是分时复用的,所以顶多算改进型的哈佛结构。ARM9虽然是哈佛结构,但是之前的版本也还是冯·诺依曼结构。早期的X86能迅速占有市场,一条很重要的原因,正是靠了冯·诺依曼这种实现简单,成本低的总线结构。处理器虽然外部总线上看是诺依曼结构的,但是由于内部CACHE的存在,因此实际上内部来看已经算是改进型哈佛结构的了。至于优缺点,哈佛结构就是复杂,对外围设备的连接与处理要求高,十分不适合外围存储器的扩展。所以早期通用CPU难以采用这种结构。而单片机,由于内部集成了所需的存储器,所以采用哈佛结构也未尝不可。处理器,依托CACHE的存在,已经很好的将二者统一起来了。
哈佛体系架构有个致命的弱点在动态加载程序上面,想象我们从外存中读取一段程序然后加载到RAM,这个程序是在数据内存当中的,我们需要一种机制将数据内存再传输到程序内存当中去,这反而增加了设备复杂度。另外,绝对不允许CPU/DSP读取程序内存来当作数据,这也是不现实的,程序一般都有只读数据区和静态数据区,烧写程序的时候会当作程序的一部分烧进ROM中,想像一下如果为了把程序和数据分开,而需要设置两块ROM,再把其中一块ROM和RAM通过复用器接起来,这是多么惨烈的景象,更不用说每次烧写都要分开烧两块ROM了。实际上即使是DSP通常也允许从程序内存的总线上读取一些数据。
对于多任务操作系统来说,管理程序内存是一件非常重要的事情,而且仅仅是保护模式下的页面映射等等机制就已经足够复杂了,如果还要求将程序和数据分开管理,复杂度就太高了。这种时候冯诺依曼体系结构就有非常大的优势了。纯的(或者接近纯的)哈佛结构只用于非常简单的硬件系统,这种系统当中通常程序完全运行在ROM中,数据几乎完全存储于RAM中,这样的结构足够简单。而要支持多任务的处理器通常引入Cache层,在Cache层实现一个哈佛体系架构,这样可以兼顾性能和灵活性。
转自知乎 链接:https://www.zhihu.com/question/22406681/answer/109474052对于多任务操作系统来说,管理程序内存是一件非常重要的事情,而且仅仅是保护模式下的页面映射等等机制就已经足够复杂了,如果还要求将程序和数据分开管理,复杂度就太高了。这种时候冯诺依曼体系结构就有非常大的优势了。纯的(或者接近纯的)哈佛结构只用于非常简单的硬件系统,这种系统当中通常程序完全运行在ROM中,数据几乎完全存储于RAM中,这样的结构足够简单。而要支持多任务的处理器通常引入Cache层,在Cache层实现一个哈佛体系架构,这样可以兼顾性能和灵活性。
实际上,绝大多数现代计算机使用的是所谓的“Modified Harvard Architecture”,指令和数据共享同一个 address space,但缓存是分开的。可以说是两种架构的一种折中吧。
在现实世界中很少有非常纯粹的概念,特别是在实际的应用里。教科书里的大多是理想化的模型,便于掌握某个概念的重点和本质,但实际中很难达到这种理想化的状态。
哈佛结构和冯诺依曼结构主要区别在是否区分指令与数据。在教科书里这是两种截然不同的做法。
实际上在内存里,指令和数据是在一起的。而在CPU内的缓存中,还是会区分指令缓存和数据缓存,最终执行的时候,指令和数据是从两个不同的地方出来的。你可以理解为在CPU外部,采用的是冯诺依曼模型,而在CPU内部用的是哈佛结构。
大部分的DSP都没有缓存,因而直接就是哈佛结构。
哈佛结构设计复杂,但效率高。冯诺依曼结构则比较简单,但也比较慢。CPU厂商为了提高处理速度,在CPU内增加了高速缓存。也基于同样的目的,区分了指令缓存和数据缓存。有时为了解决现实问题,究竟是什么主义真的没那么重要。因而个人认为争论到底是哪种结构意义不大。转自知乎 链接:https://www.zhihu.com/question/22406681/answer/21264994