Edge Boxes: Locating Object Proposals from Edges
Edges Boxes:Locating Object Proposals from Edges
Proposal:
(1), 对于一张image,计算每一个pixel的edge response,在paper中使用Structured Edge Detector来判断物体的边界。然后使用NMS去整理edge,得到最后较为稳定的object edges
(2), 计算edge groups 和 affinity
直观的来说,笔直的边界具有较高的affinity,而曲率较高的边界的affinity较低。
给定一个bbox,根据bbox内部含有的edge的affinity的最大值来判断bbox的boundary。
给定一个edges group的几个,计算两两相邻groups之间的affinity

如果两个groups之间均值夹角接近于groups的方向,则说明这两个edge groups有着较高的affinity。
(3),计算bounding box的score
从上面得到了edges groups集合S和他们的affinity,可以计算每一个candidate bounding box的object proposal score。
首先计算在group Si 中的所有edges p的mp值的和,为mi,
在group Si中计算si是否完全包含在b中的连续值wb(xi) ,介于[0,1]。
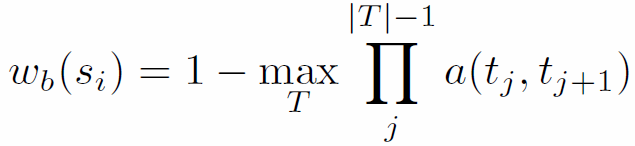
使用一种高效的算法,去计算每一个Sb。上面的公式可以求出edges group Si 与bounding box中含有最高的affinity的一些path。
在上面的公式计算下,很多的pairwise都是0。下面可以计算score:

其中bw 和 bh代表是box的width 和height,k值为1.5,作用是对大windows会有更多的edges进行偏置调节。
同时,发现:box中央的edges会比靠近box边界的edges的作用更小。所以在这里对位于box中央的bin, 做一个调整处理。

定义center的指标是:bin的width和height是整个box的一般,即bw/2, bh/2;
(4),查找策略
使用sliding window search 在一个image上进行 position,scale和aspect ratio上的查找bbox,
在可能含有一个object的区域,会产生更多的bounding boxes和更密集地聚集。利用IoU去筛选,refinement,去合并bounding box。
最后是对得到的bounding boxes进行NMS,得到最终的sorted boxes。
总结:
Object detection领域的unsupervised learning method中最经典的两个之一,另一个是 selective search。