/************************************************************************/
/* 提取轮廓两种方法对比及绘制轮廓'最大等级'分析 */
/************************************************************************/
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
int main()
{
IplImage* img = cvLoadImage("lena.jpg", CV_LOAD_IMAGE_GRAYSCALE);
IplImage* img_temp = cvCreateImage(cvGetSize(img), 8, 1);
cvThreshold(img, img, 128, 255, CV_THRESH_BINARY);
CvMemStorage* mem_storage = cvCreateMemStorage(0);
CvSeq *first_contour = NULL, *c = NULL;
//////////////////////////////////////////////////////////////////////////
// 1、
cvNamedWindow("contour1");
cvCopyImage(img, img_temp);
double t = (double)cvGetTickCount();
cvFindContours(img_temp, mem_storage, &first_contour);
cvZero(img_temp);
cvDrawContours(
img_temp,
first_contour,
cvScalar(100),
cvScalar(100),
1
);
t = (double)cvGetTickCount() - t;
cvShowImage("contour1", img_temp);
printf("run1 = %gms\n", t/(cvGetTickFrequency()*1000.));
cvClearMemStorage(mem_storage);
//////////////////////////////////////////////////////////////////////////
// 2、
cvNamedWindow("contour2");
cvCopyImage(img, img_temp);
t = (double)cvGetTickCount();
CvContourScanner scanner = cvStartFindContours(img_temp, mem_storage);
while (cvFindNextContour(scanner));
first_contour = cvEndFindContours(&scanner);
cvZero(img_temp);
cvDrawContours(
img_temp,
first_contour,
cvScalar(100),
cvScalar(100),
1
);
t = (double)cvGetTickCount() - t;
cvShowImage("contour2", img_temp);
printf("run2 = %gms\n", t/(cvGetTickFrequency()*1000.));
cvClearMemStorage(mem_storage);
cvReleaseImage(&img);
cvReleaseImage(&img_temp);
cvWaitKey();
/************************************************************************/
/* 经测试 run1 = 16.1431ms run2 = 15.8677ms (参考)
不过可以肯定这两中算法时间复杂度是相同的 */
/************************************************************************/
//////////////////////////////////////////////////////////////////////////
// 上述两种方法完成了对轮廓的提取,如想绘制轮廓都得配合cvDrawContours来使用
// 而cvDrawContours 函数第5个参数为 max_level 经查ICVL含义如下:
//
// 绘制轮廓的最大等级。如果等级为0,绘制单独的轮廓。如果为1,绘制轮廓及在其后的相同的级别下轮廓。
// 如果值为2,所有的轮廓。如果等级为2,绘制所有同级轮廓及所有低一级轮廓,诸此种种。如果值为负数,
// 函数不绘制同级轮廓,但会升序绘制直到级别为abs(max_level)-1的子轮廓。
//
// 相信好多读者初次都无法理解等级的含义,而且测试时候输入>=1 的整数效果几乎一样
// 只有提取轮廓时候的提取模式设为 CV_RETR_CCOMP CV_RETR_TREE 时这个参数才有意义
//
// 经查FindContours 函数里面这样介绍提取模式(mode)的这两个参数:
// CV_RETR_CCOMP - 提取所有轮廓,并且将其组织为两层的 hierarchy: 顶层为连通域的外围边界,次层为洞的内层边界。
// CV_RETR_TREE - 提取所有轮廓,并且重构嵌套轮廓的全部 hierarchy
//
// 下面用第一种方法进行测试
cvNamedWindow("contour_test");
cvNamedWindow("contour_raw");
img = cvLoadImage("contour.jpg", CV_LOAD_IMAGE_GRAYSCALE);
cvShowImage("contour_raw", img);
cvThreshold(img, img, 128, 255, CV_THRESH_BINARY);
img_temp = cvCloneImage(img);
cvFindContours(
img_temp,
mem_storage,
&first_contour,
sizeof(CvContour),
CV_RETR_CCOMP //#1 需更改区域
);
cvZero(img_temp);
cvDrawContours(
img_temp,
first_contour,
cvScalar(100),
cvScalar(100),
1 //#2 需更改区域
);
cvShowImage("contour_test", img_temp);
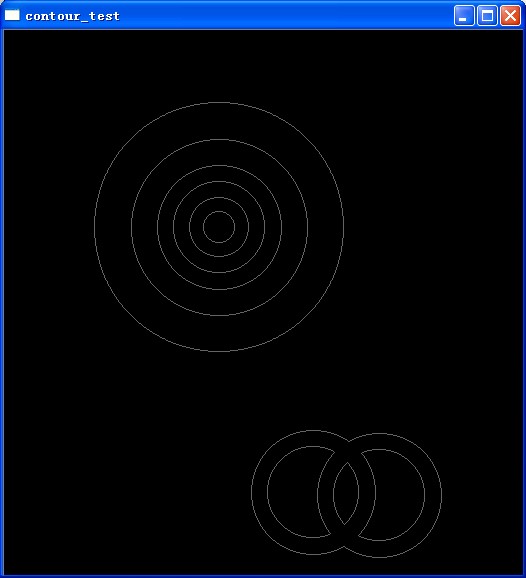
/************************************************************************/
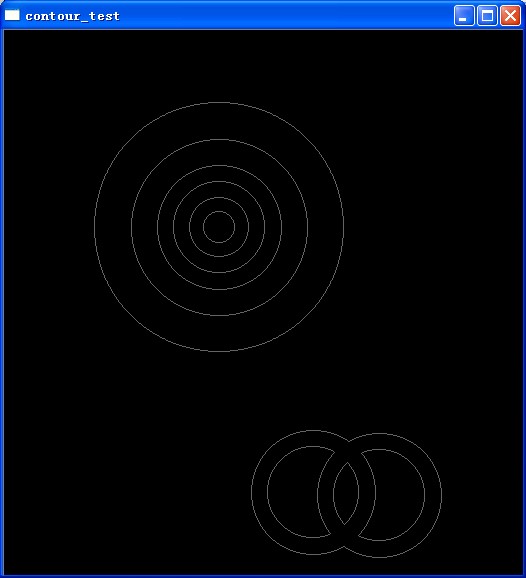
/* (1, 2) = (CV_RETR_CCOMP, 1) 如图1
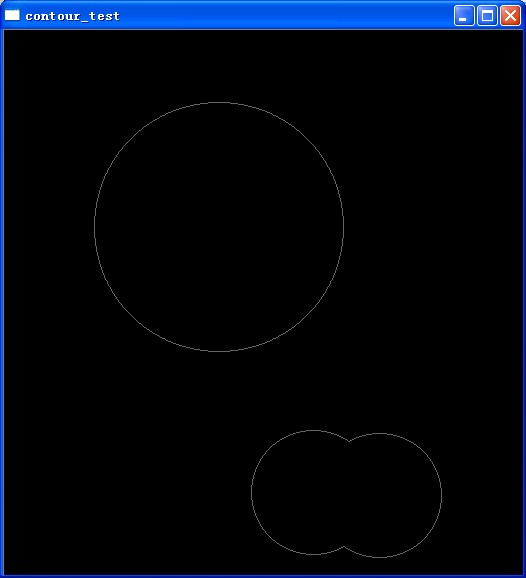
(1, 2) = (CV_RETR_CCOMP, 2) 如图2
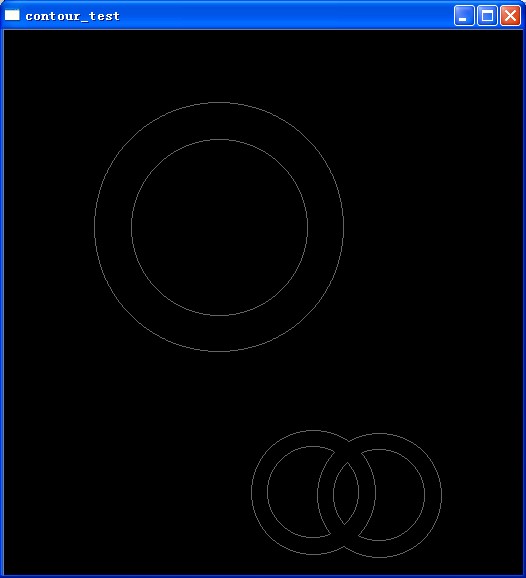
(1, 2) = (CV_RETR_TREE, 1) 如图3
(1, 2) = (CV_RETR_TREE, 2) 如图4
(1, 2) = (CV_RETR_TREE, 6) 如图5
经分析CV_RETR_CCOMP 只把图像分为两个层次,顶层和次层,一等级轮廓只匹配与其最接近
的内侧轮廓即2等级
CV_RETR_TREE 则从轮廓外到内按等级1 - n 全部分配
CV_RETR_LIST 全部轮廓均为1级 */
/************************************************************************/
cvWaitKey();
cvReleaseImage(&img);
cvReleaseImage(&img_temp);
cvReleaseMemStorage(&mem_storage);
cvDestroyAllWindows();
return 0;
}
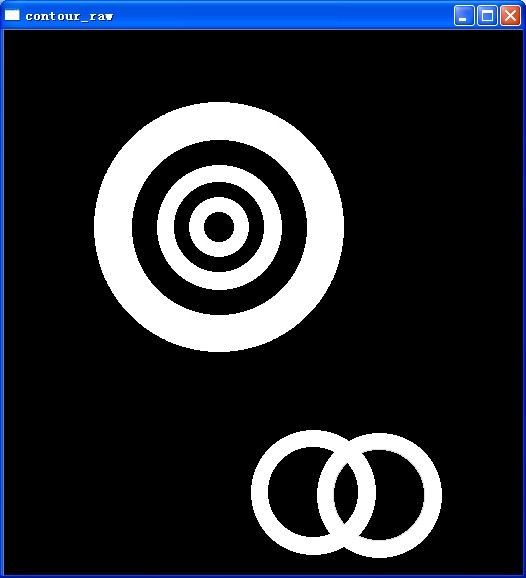
原图

图一
图二
图三
图四
图五