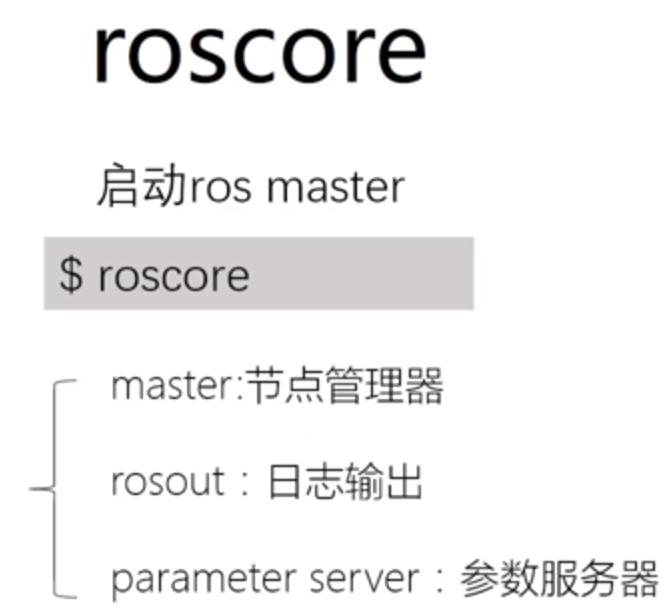
master:

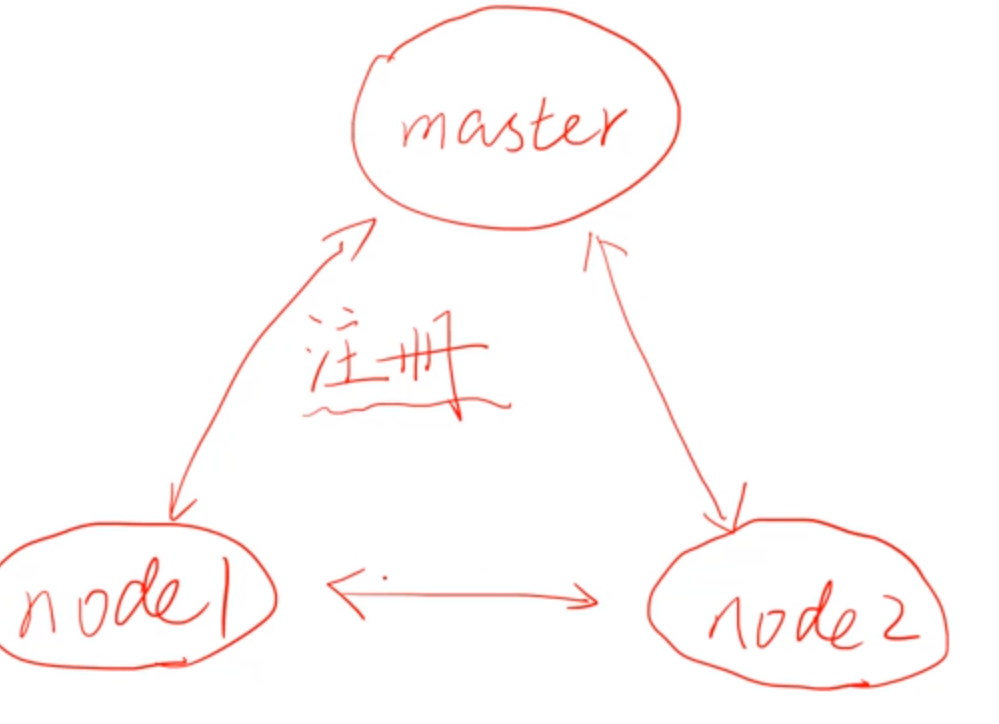
使用roscore命令启动master顺带启动了另外两个东西,rosout和parameter server
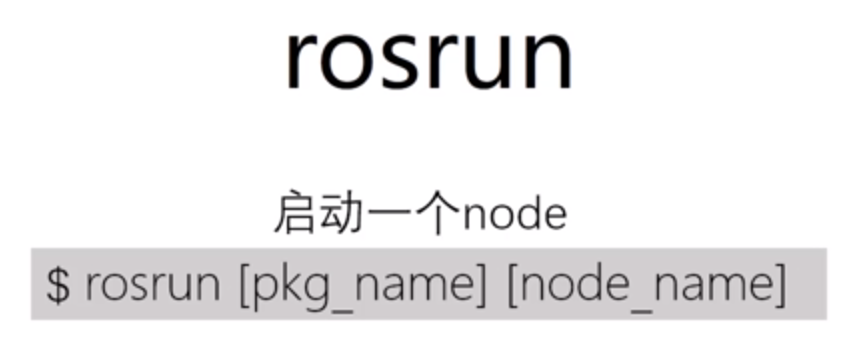
ros中node:

一个pkg中可以包含多个node ros中通常将机器人的一个功能设置成一个node
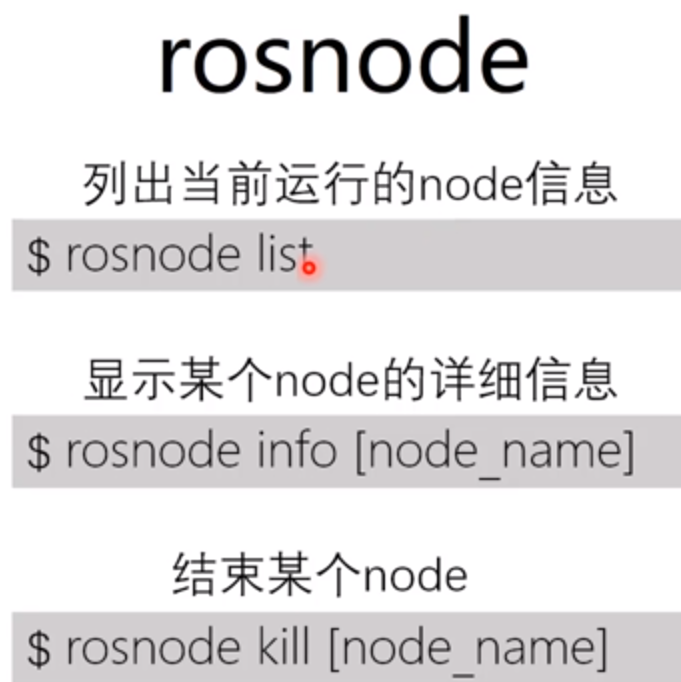
启动一个node的方法:
node的一些其他的管理:
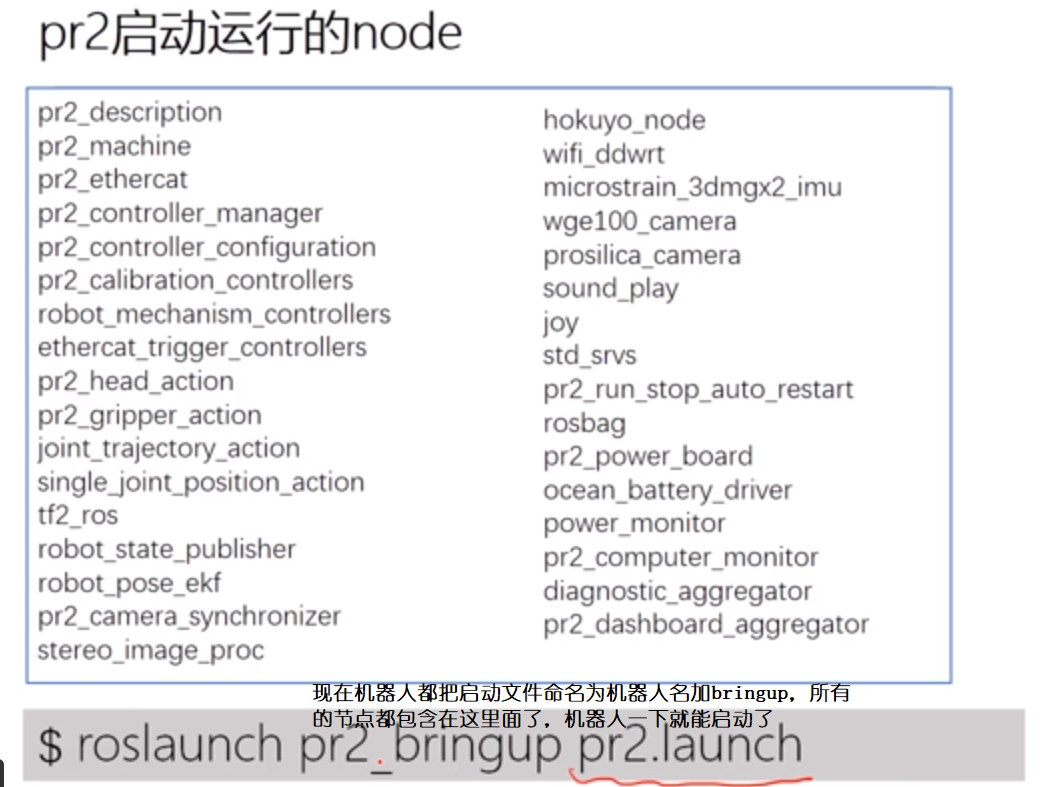
也可以一次启动多个节点:
roslaunch中设置了启动的规则和启动的节点,也会进行检测roscore是否已经启动,如果没有启动的话会自动启动roscore。
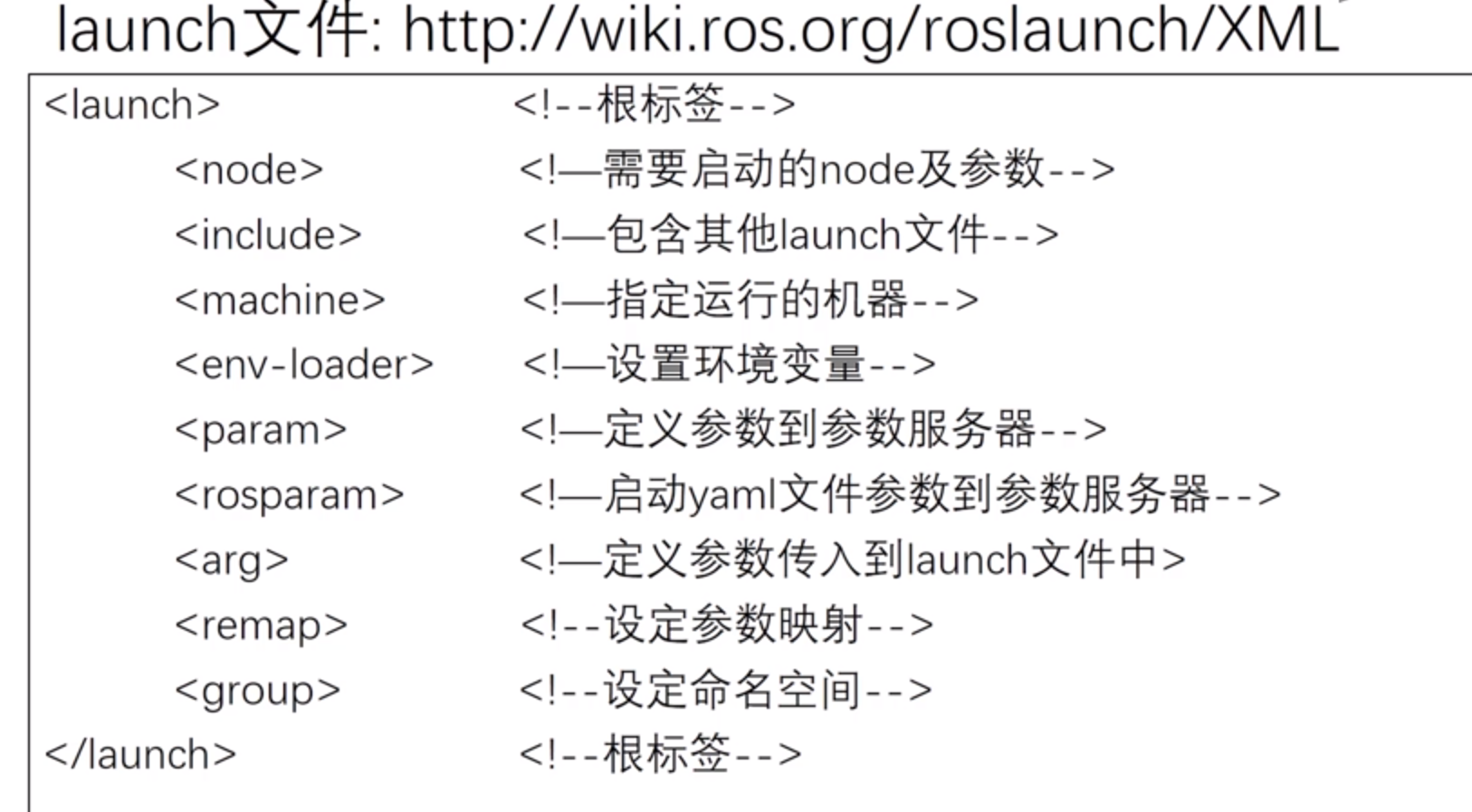
示例如下:roslaunch文件遵循xml文件的写法 (了解为主,会改模版即可) 下面是pr2机器人的启动节点launch文件
ros中主要的通信方式有下面几种: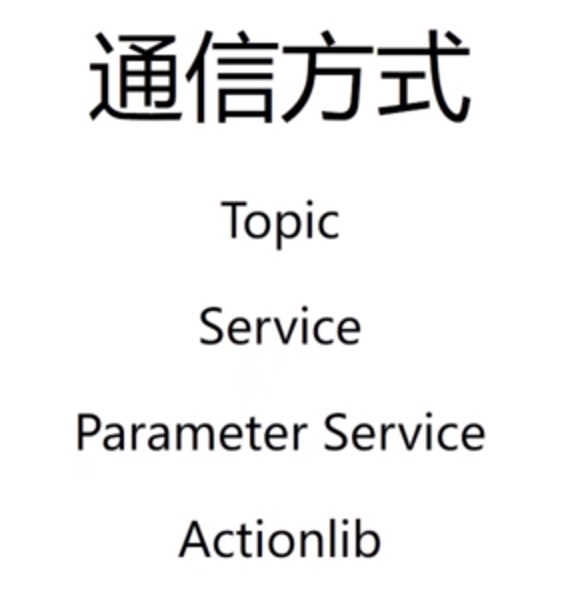
节点在发送数据的时候严格遵循一定的数据格式:
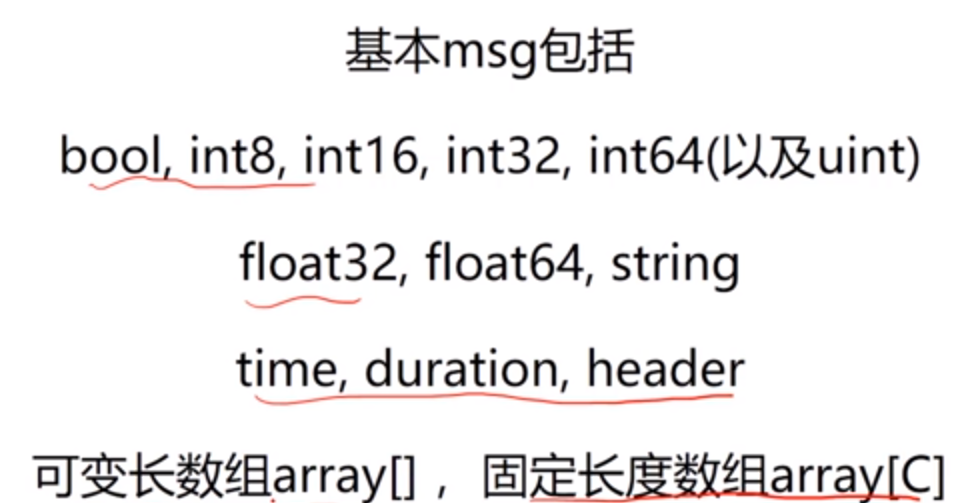
message常用的数据格式:
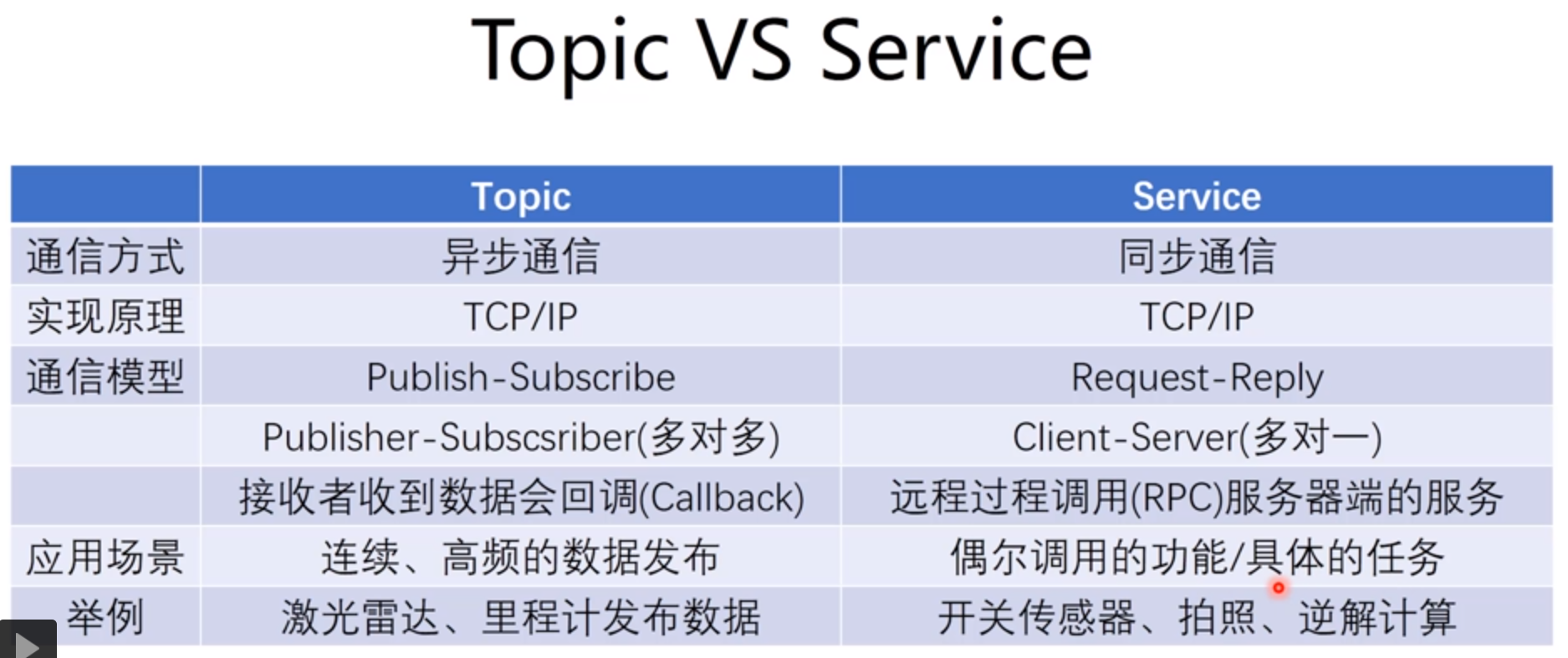
topic的一些操作:

service:

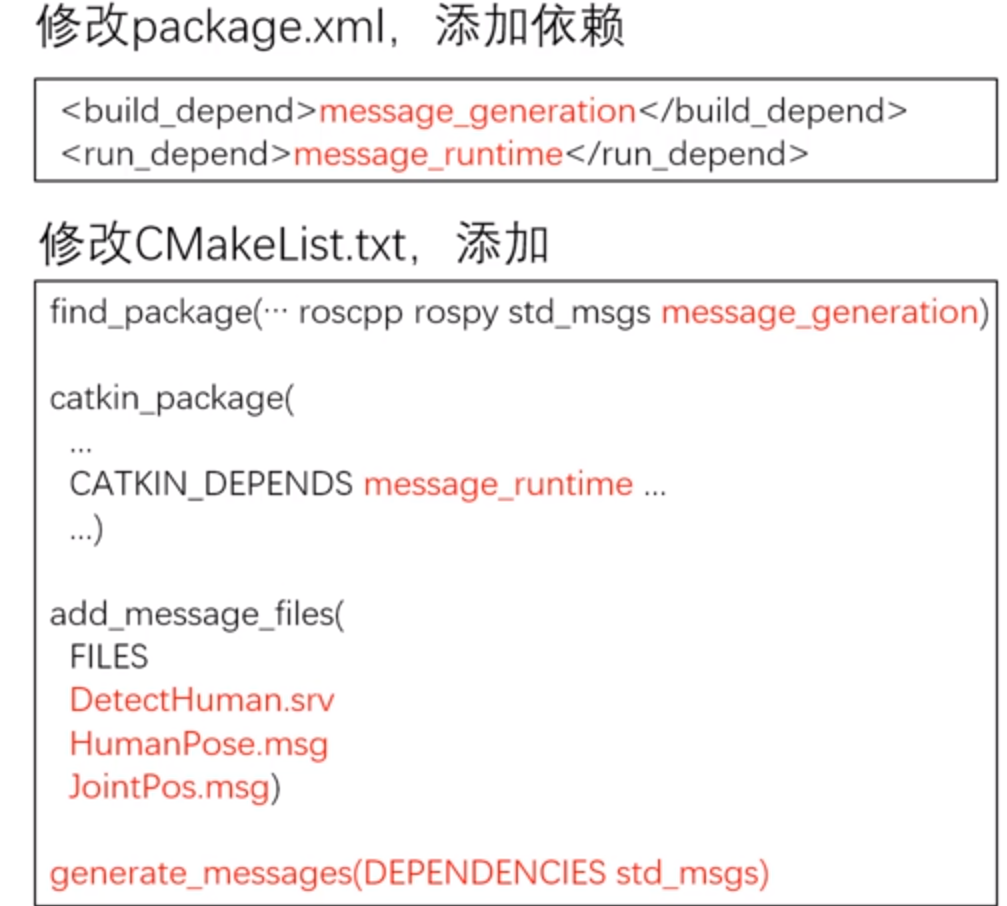
当程序中有自定义消息类型的时候,这两个文件需要进行修改。
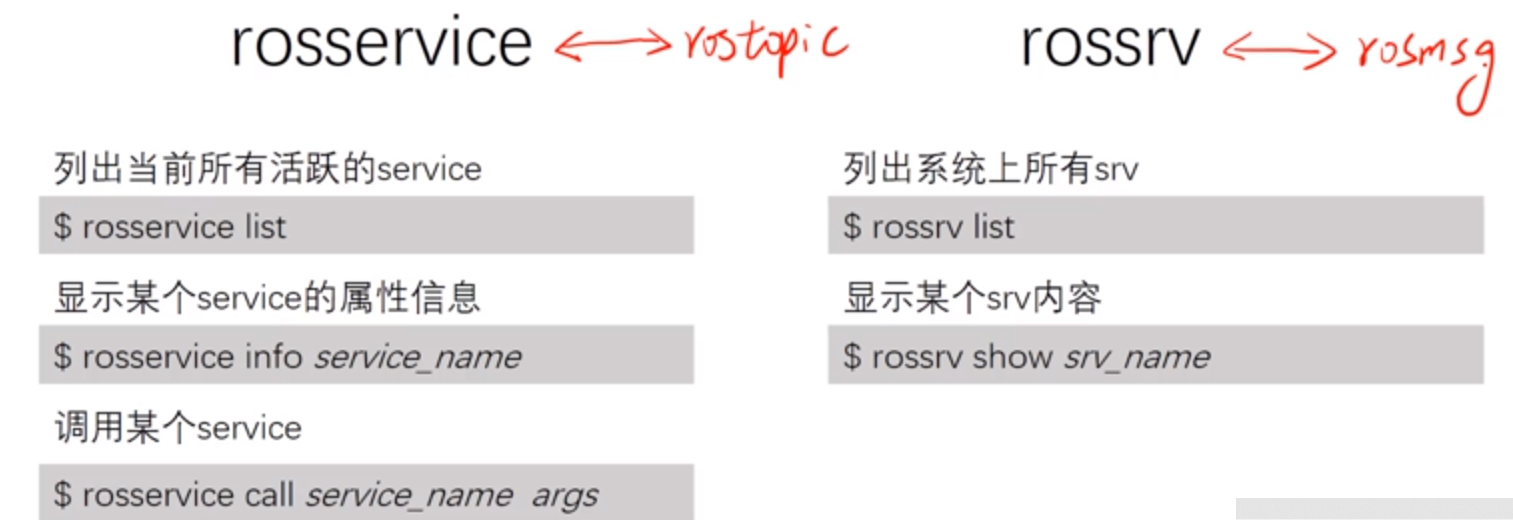
service和topic以及srv和msg在操作上的区别:
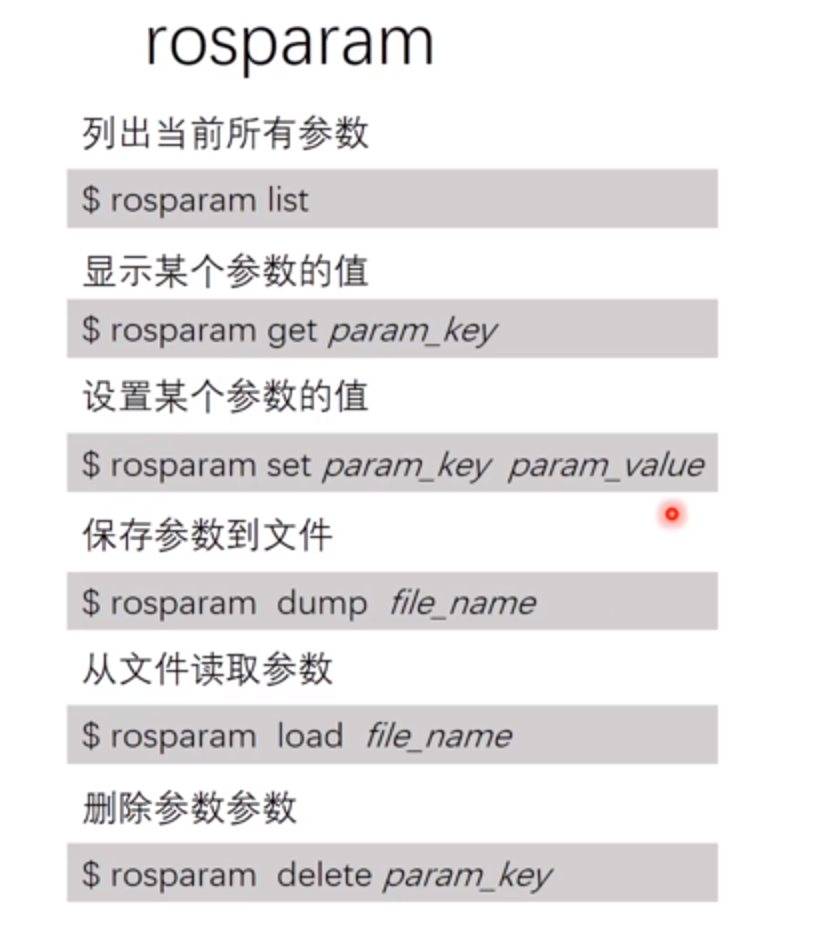
parameter 参数服务器
参数服务器的操作:
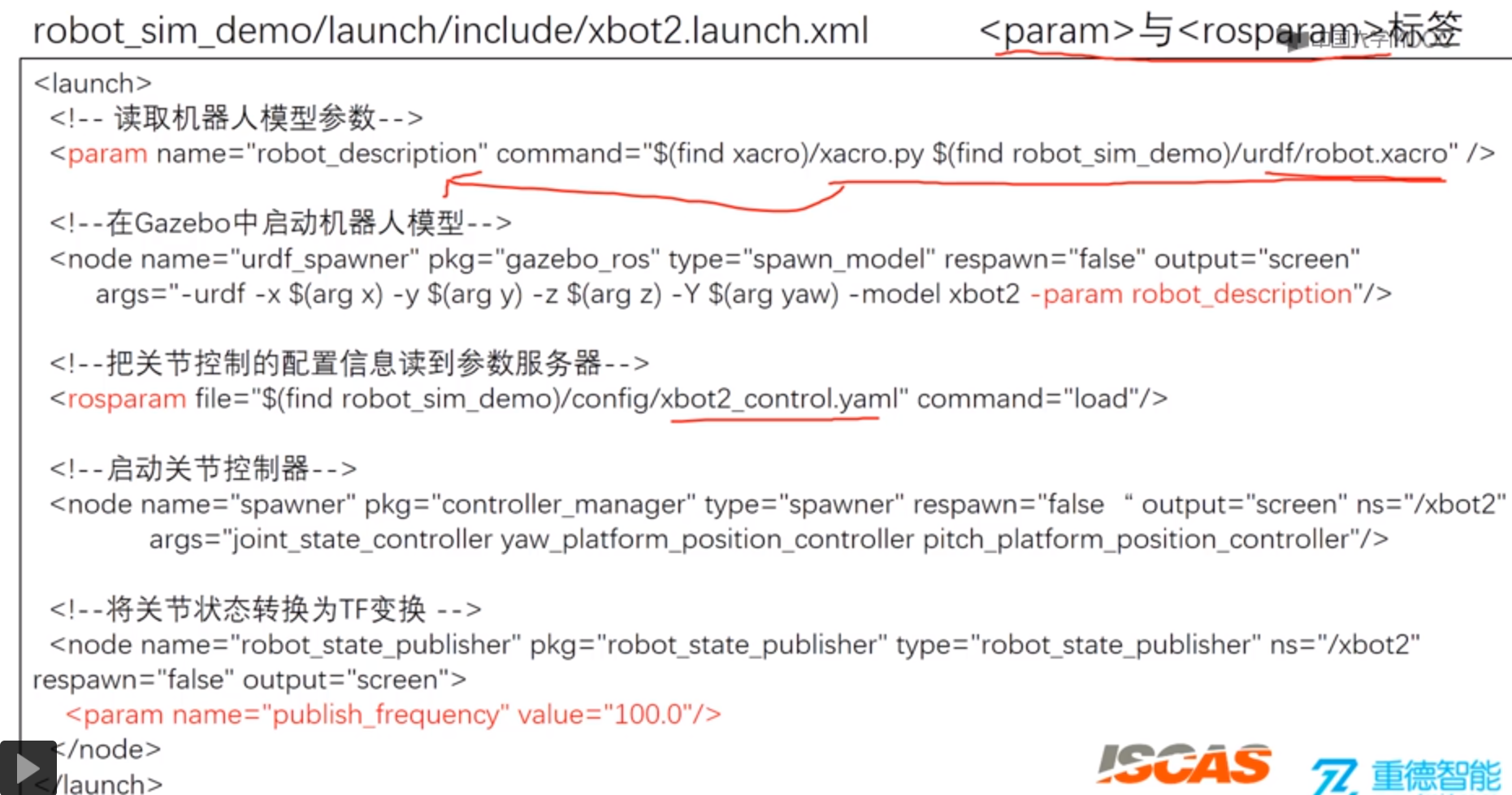
参数服务器文件所遵循的格式:

参数服务器在launch文件中的写法:
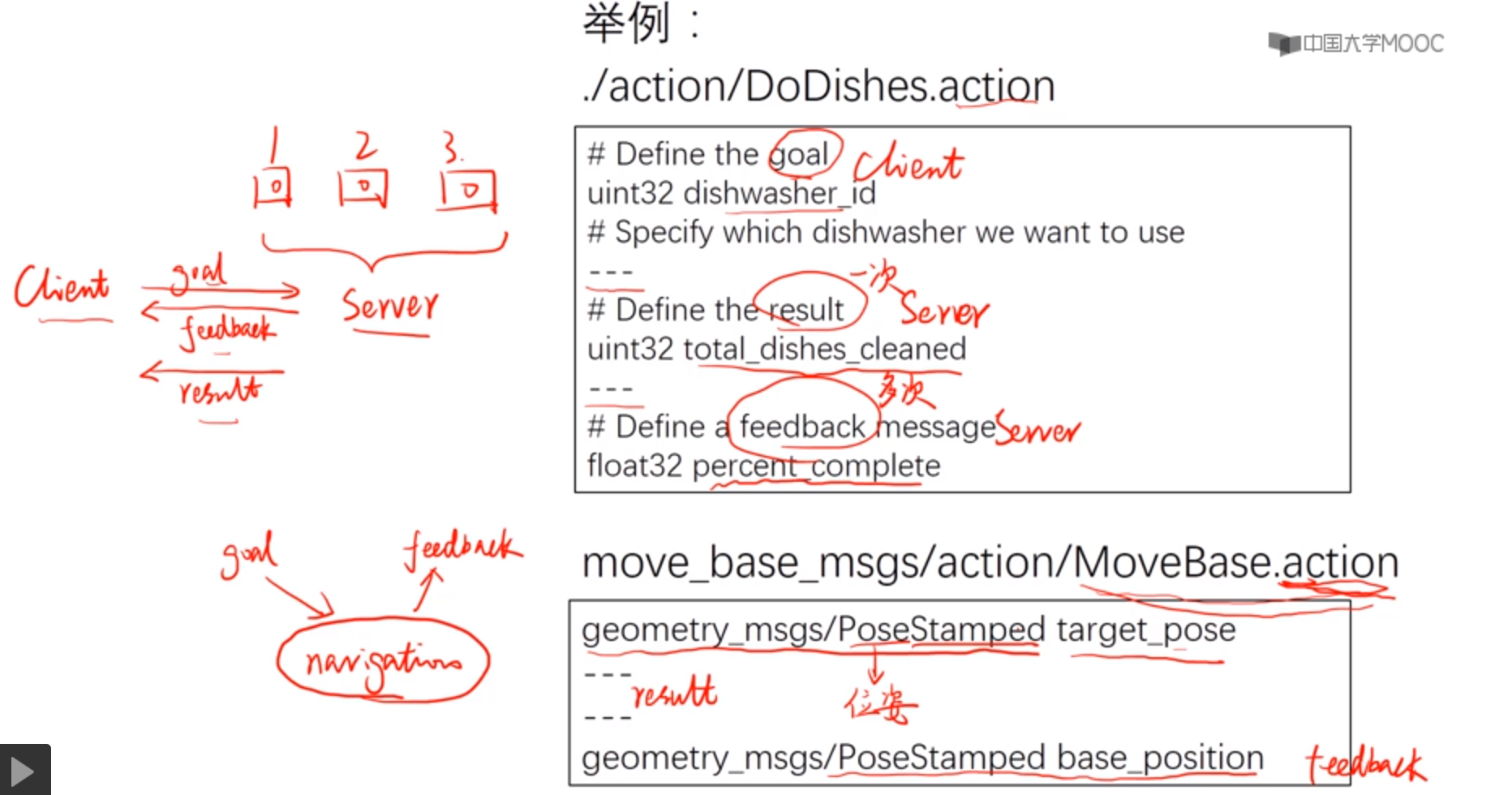
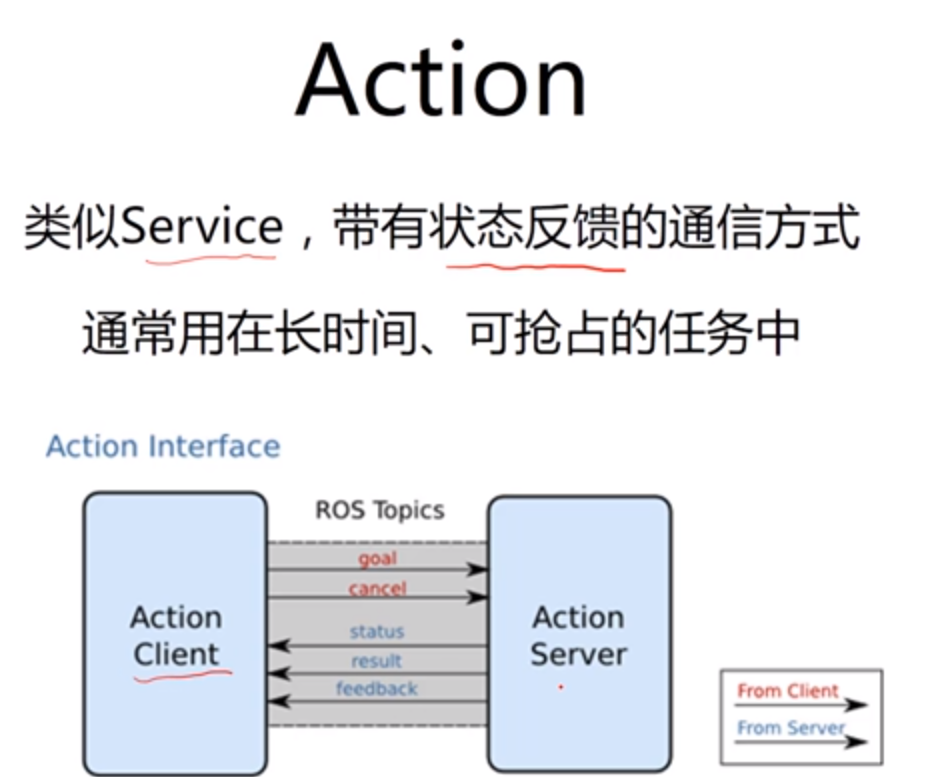
最后一种通信方式:
action: 是service的升级板,service是等servicer发送完之后给client反馈发送的状态。但是action是实时反馈此时的状态,以检测client端的实际状态。

action的写法要分为三段,中间用短横线隔开。