第六章 信号和信号处理
摘要
- 讲述了信号和信号处理;
- 介绍了信号和中断的统一处理,有助于从正确的角度看待信号;
- 将信号视为进程中断,将进程从正常执行转移到信号处理;
- 解释了信号的来源,包括来自硬件、异常和其他进程的信号;
- 说明信号在Unix/Linux 中的常见用法;
- 解释Unix/Linux中的信号处理,包括信号类型、信号向量位、信号掩码位、进程PROC结构体中的信号处理程序以及信号处理步骤;
- 展示如何安装信号捕捉器来处理程序异常,如用户模式下的段错误;
信号和中断
“中断”是从I/O设备或协处理器发送到CPU的外部请求,它将CPU从正常执行转移 到中断处理。
“信号”是发送给进程的请求,将进程从正常执行转移到中断处理。
中断的概念和机制
1.进程:一个“进程”就是一系列活动。广义的 “进程”包括:
从事日常事务的人。
在用户模式或内核模式下运行的Unix/Linux进程。
执行机器指令的CPU。
2.“中断”是发送给“进程”的事件,它将“进程”从正常活动转移到其他活动,称为“中断处理”。“进程”可在完成“中断”处理后恢复正常活动。
3.“中断”一词可应用于任何“进程”,并不仅限于计算机中的CPU。
根据来源,中断可分为三类:
- 来自硬件的中断;
- 来自其他人的中断;
- 自己造成的中断。
按照紧急程度,中断可分为以下几类:
- 不可屏蔽(NMI);
- 可屏蔽。
进程中断
这类中断是发送给进程的中断。当某进程正在执行时,可能会收到来自3个不同来源的中断:
- 来自硬件的中断:终端、间隔定时器的“Ctrl+C”组合键等。
- 来自其他进程的中断:kill(pid,SIG#), death_of_child等。
- 自己造成的中断:除以0、无效地址等。
每个进程中断都被转换为一个唯一ID号,发送给进程。与多种类的人员中断不同,我们始终可限制在一个进程中的中断的数量。
Unix/Linux中的进程中断称为信号,编号为1到31。
进程的PROC结构体中有对应每个信号的动作函数,进程可在收到信号后执行该动作函数。与人员类似,进程也可屏蔽某些类型的信号,以推迟处理。必要时,进程还可能会修改信号动作函数。
硬件中断:
这类中断是发送给处理器或CPU的信号。它们也有三个可能的来源:
- 来自硬件的中断:定时器、I/O设备等.
- 来自其他处理器的中断:FFP. DMA、多处理器系统中的其他CPU。
- 自己造成的中断:除以0、保护错误、INT指令。
毎个中断都有唯一的中断向量号。动作函数是中断向量表中的中断处理程序。
进程的陷阱错误
进程可能会自己造成中断。这些中断是由被CPU识别为异常的错误引起的,例如除以0、无效地址、非法指令、越权等。
当进程遇到异常时,它会陷入操作系统内核,将陷阱原因转换为信号编号,并将信号发送给自己。如果在用户模式下发生异常,则进程的默认操作是终止,并使用一个可选的内存转储进行调试。
Unix/Linux信号示例
1.按“Ctrl+C”组合键通常会导致当前运行的进程终止。原因如下:
“Ctr1+C”组合键会生成一个键盘硬件中断。键盘中断处理程序将“Ctrl+C”组合键转换为SIGINT(2)信号,发送给终端上的所有进程,并唤醒等待键盘输人的进程。在内核模式下,每个进程都要检查和处理未完成的信号。进程对大多数信号的默认操作是调用内核的kexit(exitValue)函数来终止。在Linux中,exitValue的低位字节是导致进程终止的信号编号。
2.用户可使用nohup a.out 命令在后台运行一个程序。即使在用户退出后,进程仍将继续运行。
nobup命令会使sh像往常一样复刻子进程来执行程序,但是子进程会忽略SIGHuP(1)信号。当用户退出时,sh会向与终端有关的所有进程发送一个SIGHUP信号。后台进程在接收到这一信号后,会忽略它并继续运行。为防止后台进程使用终端进行I/O,后台进程通常会断开与终端的连接(通过将其文件描述符0、1、2重定向到/dev/null),使其完全不受任何面向终端信号的影响。
3.用户可以使用sh命令killpid(orkill-s9pia)杀死该进程。方法如下。
执行杀死的进程向pid标识的目标进程发送一个SIGTERM ( 15 )信号,请求它死亡。目标进程将会遵从请求并终止。如果进程选择忽略SIGTERM信号,它可能拒绝死亡。
Unix\Linux中的信号处理
信号类型
Unix\Linux支持31种不同的信号,每种信号在signal.h中都有定义。
#define SIGHUP
#define SIGINT
#define SIGQUIT
#define SIGILL #define SIGTRAP
#define SIGABRT #define SIGIOT
#define SIGBUS
#define SIGFPE
#define SIGKILL
#define SIGUSR1
#define SIGSEGV
#define SIGUSR2
#define SIGPIPE #define SIGALRM
#define SIGTERM
#define SIGSTKFLT
#define SIGCHLD
#define SIGCONT
#define SIGSTOP
#define SIGTSTP
#define SIGTTIN
#define SIGTTOU
#define SIGURG
#define SIGXCPU
#define SIGXFSZ
#define SIGVTALRM
#define SIGPROF
#define SIGWINCH
#define SIGPOLL
#define SIGPWR
#define SIGSYS
信号的来源
来自硬件中断的信号:在执行过程中,一些硬件中断被转换为信号发送给进程硬件信号示例。
- 中断键(Ctrl+C),它产生一个SIGINT(2)信号。
- 间隔定时器,当他的时间到期时,会生成一个SIGALRM(14)、SIGTALRM(26)或SIGPROF(27)信号。
- 其他硬件错误,如总线错误、IO陷进。
来自异常的信号:常见的陷阱信号有SIGFPE(8),表示浮点异常(除以0),最常见也是最可怕的时SIGSEGV(11),表示段错误。
来自其他进程的信号:进程可以使用kill(pid,sig)系统调用向pid标识的目标进程发送信号。
进程PROC结构体中的信号
每个进程PROC都有一个32位向量,用来记录发送给进程的信号。在位向量中,每一位(0位除外)代表一个信号编号。此外,它还有一个信号MASK位向量,用来屏蔽相应的信号。
信号处理函数
每个进程PROC 都有一个信号处理数组 int sig[32]。Sig[32]数组的每个条目都指定了如何处理相应的信号,其中0表示 DEFault(默认).1表示 IGNore(忽略).其他非零值表示用户模式下预先安装的信号捕捉(处理)函数。下图给出了信号位向量、屏蔽位向量和信号处理函数。

安装吸纳后捕捉函数
进程可使用系统调用
int r = signal(int signal_number, void *handler);
来修改选定信号编号的处理函数,SIGKILL(9)和SIGSTOP(19)除外,他们不能修改。
signal()系统调用在所有类Unix系统中均可用,当有一些缺点:
- 在执行已安装的信号捕捉函数之前,通常讲信号处理函数重置位DEFault;
- signal()不能阻塞其他信号;
- signal()只能向捕捉函数发送一个信号编号;
- signal()可能不适用于多线程程序中的线程;
- 不同Unix版本的signal()可能会有所不同;
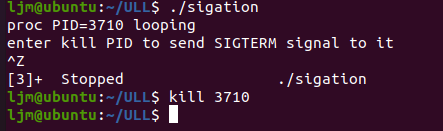
示例:sigaction()的使用
#include <stdio.h>
#include <unistd.h>
#include <string.h>
#include <signal.h>
void handler(int sig, siginfo_t *siginfo, void *context)
{
printf("handler: sig=%d from PID=%d UID=%d\n",sig, siginfo->si_pid, siginfo->si_uid);
}
int main(int argc, char *argv[])
{
struct sigaction act;
memset(&act, 0, sizeof(act));
act.sa_sigaction = &handler;
act.sa_flags = SA_SIGINFO;
sigaction(SIGTERM, &act, NULL);
printf("proc PID=%d looping\n", getpid());
printf ("enter kill PID to send SIGTERM signal to it\n");
while(1)
{
sleep (1);
}
}
信号处理步骤
1. 当某进程处于内核模式时,会检査信号并处理未完成的信号。如果某信号有用户安装的捕捉函数,该进程会先清除信号,获取捕捉函数地址,对于大多数陷阱信号,则将已安装的捕捉函数重置为DEFault。然后,它会在用户模式下返回,以执行捕捉函数,以这种方式篡改返回路径。当捕捉函数结束时,它会返间到最初的中断点,即它最后进入内核模式的地方。因此,该进程会先迂回执行捕捉函数,然后再恢复正常执行。
2. 重置用户安装的信号捕捉函数:用户安装的陷阱相关信号捕捉函数用于处理用户代码中的陷阱错误。由于捕捉函数也在用户模式下执行,因此可能会再次出现同样的错误如果是这样,该进程最终会陷入无限循环,一直在用户模式和内核模式之间跳跃:为了防止这种情况,Unix内核通常会在允许进程执行捕捉函数之前先将处理函数重置为DEFault这意味着用户安装的捕捉函数只对首次出现的信号有效若要捕捉再次出现的同一信号,则必须重新安装捕捉函数但是,用户安装的信号捕捉函数的处理方法并不都一样,在不同Unix 版本中会有所不同。
3. 信号和喚醒:在Unix/Linux内核中有两种SLEEP进程;深度休眠进程和浅度休眠进程。前一种进程不可中断,而后一种进程可由信号中断。如果某进程处于不可中断的SLEEP状态,到达的信号(必须来自硬件中断或其他进程)不会唤醒进程一如果它处于可中断的SLEEP状态,到达的信号将会唤醒它。
信号与异常
Unix信号最初设计用于一下用途
- 作为进程异常的统一处理方法;
- 让进程通过预先安装的信号捕捉函数处理用户模式下的程序错误;
- 在特殊情况下,它会让某个进程通过信号杀死另一个进程。
信号用作IPC
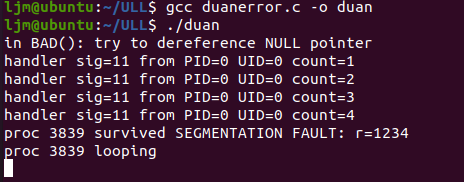
示例:段错误捕捉函数
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <signal.h>
#include <setjmp.h>
#include <string.h>
//#include <siginfo.h>
jmp_buf env;
int count = 0;
void handler(int sig, siginfo_t *siginfo, void *context)
{
printf ("handler sig=%d from PID=%d UID=%d count=%d\n", sig, siginfo->si_pid, siginfo->si_uid, ++count);
if (count >= 4) // let it occur up to 4 times
longjmp(env, 1234);
}
int BAD()
{
int *ip = 0;
printf("in BAD(): try to dereference NULL pointer\n");
*ip = 123; // dereference a NULL pointer
printf("should not see this line\n");
}
int main (int argc, char *argv[])
{
int r;
struct sigaction act;
memset (&act, 0, sizeof(act));
act.sa_sigaction = &handler;
act.sa_flags = SA_SIGINFO;
sigaction(SIGSEGV, &act, NULL);
if ((r = setjmp(env)) == 0)
BAD();
else
printf("proc %d survived SEGMENTATION FAULT: r=%d\n",getpid(), r);
printf ("proc %d looping\n" ,getpid());
while(1);
}
Linux中的IPC
IPC是指用于进程间通信的机制。IPC包含
管道和FIFO
- 一个管道有一个读取段和一个写入段。
- 管道的主要用途是链接一对管道写进程和读进程。
信号
进程课使用kill系统调用向其他进程发送信号,其他进程使用信号捕捉函数处理信号。将信号用作IPC的一个主要缺点是信号只是用作通知,不含任何信息内容。
System V IPC
Linux支持SystemVIPC,包括共享内存、信号量和消息队列。在Linux中,多种 SystemVIPC函数,例如用于添加/移除共享内存的shmat/shmdt 用于获取/操作信号量的semget/semop和用于发送/接收消息的msgsnd/msgrcv,都是库包装函数,它们都会向 Linux内核发出一个ipc0系统调用。ipc0的实现是Linux所特有的,不可移植。
POSIX信息队列
POSIX标准以信息队列为基础定义了IPC机制。他们类似于System V IPC的消息队列,但更通用且可移植。
线程同步机制
Linux不区分进程和线程。在Linux中,进程是共享某些公共资源的线程。如果是使用有共享地址空间的clone()系统调用创建的进程,它们可使用互斥量和条件变量通过共享内存进行同步通信。另外,常规进程可添加到共享内存,使它们可作为线程进行同步。
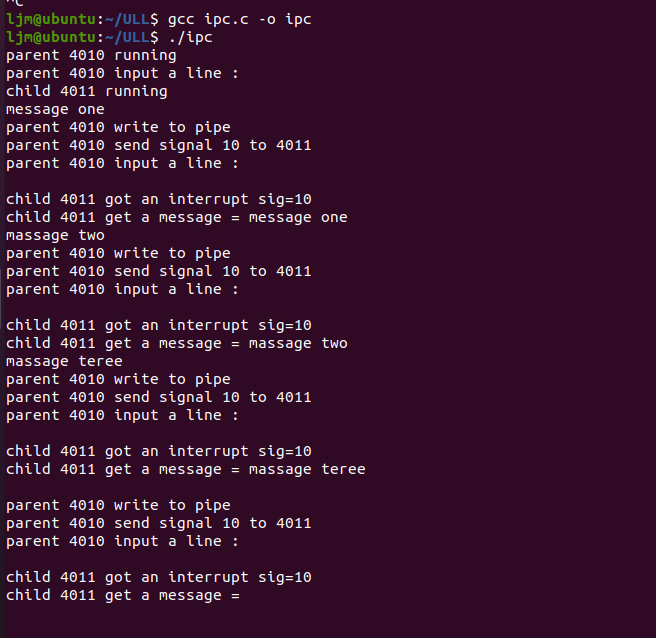
编程项目:实现一个消息IPC
#include <stdio.h>
#include <signal.h>
#include <fcntl.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <signal.h>
#include <setjmp.h>
#define LEN 64
int ppipe[2];
int pid;
char line[LEN];
int parent()
{
printf("parent %d running\n", getpid());
close(ppipe[0]); // parent = pipe writer
while(1)
{
printf("parent %d input a line : \n", getpid());
fgets(line, LEN, stdin);
line[strlen(line)-1] = 0; // kill \n at end
printf("parent %d write to pipe\n", getpid());
write(ppipe[1], line, LEN); // write to pipe
printf("parent %d send signal 10 to %d\n", getpid(), pid);
kill(pid, SIGUSR1); // send signal to child process
}
}
void chandler(int sig)
{
printf("\nchild %d got an interrupt sig=%d\n", getpid(), sig);
read(ppipe[0], line, LEN); // read pipe
printf("child %d get a message = %s\n", getpid(), line);
}
int child()
{
char msg[LEN];
int parent = getppid();
printf("child %d running\n", getpid());
close(ppipe[1]); // child is pipe reader
signal(SIGUSR1, chandler); // install signal catcher
while(1);
}
int main ()
{
pipe(ppipe); // create a pipe
pid = fork() ; // fork a child process
if (pid) // parent
parent();
else
child ();
}