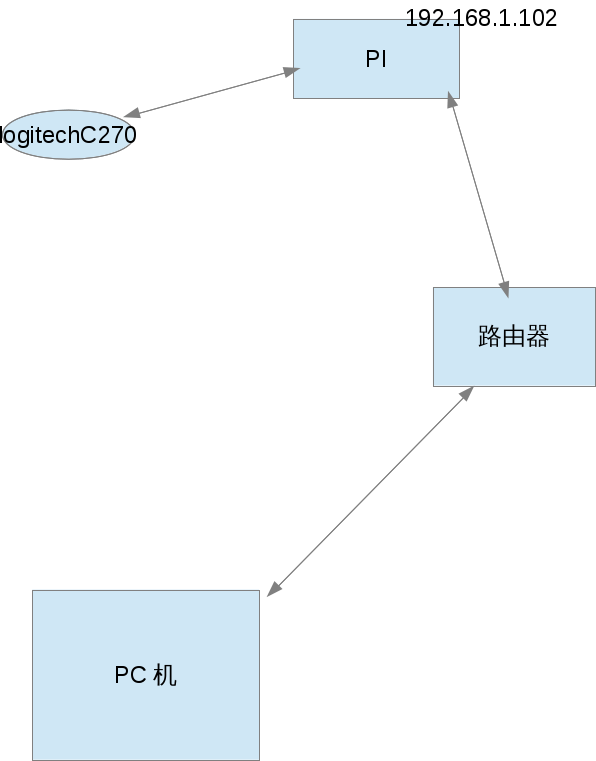
树莓PI远程控制摄像头请参考前文:http://www.cnblogs.com/yuliyang/p/3561209.html
参考:http://answers.opencv.org/question/133/how-do-i-access-an-ip-camera/
http://blog.youtueye.com/work/opencv-hog-peopledetector-trainning.html
项目环境:opencv2.8 ,debian, QT
代码:
运行:
yuliyang@debian-yuliyang:~/build-peopledetect-桌面-Debug$ ./peopledetect /home/yuliyang/OLTbinaries/INRIAPerson/HOG/model_4BiSVMLight.alt
model_4BiSVMLight.alt文件是INRIAPerson行人检测库HOG文件夹下的modle文件
#include <fstream>
#include <iostream>
#include <vector>
#include <stdio.h>
#include <string.h>
#include <ctype.h>
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/objdetect/objdetect.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace std;
using namespace cv;
vector<float> load_lear_model(const char* model_file)
{
vector<float> detector;
FILE *modelfl;
if ((modelfl = fopen (model_file, "rb")) == NULL)
{
cout<<"Unable to open the modelfile"<<endl;
return detector;
}
char version_buffer[10];
if (!fread (&version_buffer,sizeof(char),10,modelfl))
{
cout<<"Unable to read version"<<endl;
return detector;
}
if(strcmp(version_buffer,"V6.01"))
{
cout<<"Version of model-file does not match version of svm_classify!"<<endl;
return detector;
}
// read version number
int version = 0;
if (!fread (&version,sizeof(int),1,modelfl))
{
cout<<"Unable to read version number"<<endl;
return detector;
}
if (version < 200)
{
cout<<"Does not support model file compiled for light version"<<endl;
return detector;
}
long kernel_type;
fread(&(kernel_type),sizeof(long),1,modelfl);
{// ignore these
long poly_degree;
fread(&(poly_degree),sizeof(long),1,modelfl);
double rbf_gamma;
fread(&(rbf_gamma),sizeof(double),1,modelfl);
double coef_lin;
fread(&(coef_lin),sizeof(double),1,modelfl);
double coef_const;
fread(&(coef_const),sizeof(double),1,modelfl);
long l;
fread(&l,sizeof(long),1,modelfl);
char* custom = new char[l];
fread(custom,sizeof(char),l,modelfl);
delete[] custom;
}
long totwords;
fread(&(totwords),sizeof(long),1,modelfl);
{// ignore these
long totdoc;
fread(&(totdoc),sizeof(long),1,modelfl);
long sv_num;
fread(&(sv_num), sizeof(long),1,modelfl);
}
double linearbias = 0.0;
fread(&linearbias, sizeof(double),1,modelfl);
if(kernel_type == 0) { /* linear kernel */
/* save linear wts also */
double* linearwt = new double[totwords+1];
int length = totwords;
fread(linearwt, sizeof(double),totwords+1,modelfl);
for(int i = 0;i<totwords;i++){
float term = linearwt[i];
detector.push_back(term);
}
float term = -linearbias;
detector.push_back(term);
delete [] linearwt;
} else {
cout<<"Only supports linear SVM model files"<<endl;
}
fclose(modelfl);
return detector;
}
void help()
{
printf(
"
Demonstrate the use of the HoG descriptor using
"
" HOGDescriptor::hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());
"
"Usage:
"
"./peopledetect (<image_filename> | <image_list>.txt)
");
}
int main(int argc, char** argv)
{
VideoCapture cap;
cap.open("http://192.168.1.102:8001/?action=stream?dummy=param.mjpg");//在浏览器里输入http://192.168.1.102:8001/?action=stream
cap.set(CV_CAP_PROP_FRAME_WIDTH, 320);
cap.set(CV_CAP_PROP_FRAME_HEIGHT, 240);
if (!cap.isOpened())
return -1;
Mat img;
FILE* f = 0;
// char _filename[1024];
// if( argc != 3 )
// {
// cout<<"ERROR"<<endl;
// return 0;
// }
// img = imread(argv[1]);
// cap >> img;
// if( img.data )
// {
// strcpy(_filename, argv[1]);
// }
// else
// {
// f = fopen(argv[1], "rt");
// if(!f)
// {
// fprintf( stderr, "ERROR: the specified file could not be loaded
");
// return -1;
// }
// }
HOGDescriptor hog;
//hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());
vector<float> detector = load_lear_model(argv[1]);
hog.setSVMDetector(detector);
namedWindow("people detector", 1);
while (true)
{
cap >> img;
if (!img.data)
continue;
vector<Rect> found, found_filtered;
hog.detectMultiScale(img, found, 0, Size(4,4), Size(0,0), 1.05, 2);
size_t i, j;
for (i=0; i<found.size(); i++)
{
Rect r = found[i];
for (j=0; j<found.size(); j++)
if (j!=i && (r & found[j])==r)
break;
if (j==found.size())
found_filtered.push_back(r);
}
for (i=0; i<found_filtered.size(); i++)
{
Rect r = found_filtered[i];
r.x += cvRound(r.width*0.1);
r.width = cvRound(r.width*0.8);
r.y += cvRound(r.height*0.06);
r.height = cvRound(r.height*0.9);
rectangle(img, r.tl(), r.br(), cv::Scalar(0,255,0), 2);
}
imshow("people detector", img);
if (waitKey(20) >= 0)
break;
}
// for(;;)
// {
// char* filename = _filename;
// if(f)
// {
// if(!fgets(filename, (int)sizeof(_filename)-2, f))
// break;
// //while(*filename && isspace(*filename))
// // ++filename;
// if(filename[0] == '#')
// continue;
// int l = strlen(filename);
// while(l > 0 && isspace(filename[l-1]))
// --l;
// filename[l] = '�';
// img = imread(filename);
// }
// printf("%s:
", filename);
// if(!img.data)
// continue;
// fflush(stdout);
// vector<Rect> found, found_filtered;
// double t = (double)getTickCount();
// // run the detector with default parameters. to get a higher hit-rate
// // (and more false alarms, respectively), decrease the hitThreshold and
// // groupThreshold (set groupThreshold to 0 to turn off the grouping completely).
// hog.detectMultiScale(img, found, 0, Size(8,8), Size(32,32), 1.05, 2);
// t = (double)getTickCount() - t;
// printf("tdetection time = %gms
", t*1000./cv::getTickFrequency());
// size_t i, j;
// for( i = 0; i < found.size(); i++ )
// {
// Rect r = found[i];
// for( j = 0; j < found.size(); j++ )
// if( j != i && (r & found[j]) == r)
// break;
// if( j == found.size() )
// found_filtered.push_back(r);
// }
// for( i = 0; i < found_filtered.size(); i++ )
// {
// Rect r = found_filtered[i];
// // the HOG detector returns slightly larger rectangles than the real objects.
// // so we slightly shrink the rectangles to get a nicer output.
// r.x += cvRound(r.width*0.1);
// r.width = cvRound(r.width*0.8);
// r.y += cvRound(r.height*0.07);
// r.height = cvRound(r.height*0.8);
// rectangle(img, r.tl(), r.br(), cv::Scalar(0,255,0), 3);
// }
// imshow("people detector", img);
// int c = waitKey(0) & 255;
// if( c == 'q' || c == 'Q' || !f)
// break;
// }
if(f)
fclose(f);
return 0;
}
//#include "opencv2/imgproc/imgproc.hpp"
//#include "opencv2/objdetect/objdetect.hpp"
//#include "opencv2/highgui/highgui.hpp"
//#include <stdio.h>
//#include <string.h>
//#include <ctype.h>
//using namespace cv;
//using namespace std;
//void help()
//{
// printf(
// "
Demonstrate the use of the HoG descriptor using
"
// " HOGDescriptor::hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());
"
// "Usage:
"
// "./peopledetect (<image_filename> | <image_list>.txt)
");
//}
//int main(int argc, char** argv)
//{
// Mat img;
// FILE* f = 0;
// char _filename[1024];
// if( argc == 1 )
// {
// printf("Usage: peopledetect (<image_filename> | <image_list>.txt)
");
// return 0;
// }
// img = imread(argv[1]);
// if( img.data )
// {
// strcpy(_filename, argv[1]);
// }
// else
// {
// f = fopen(argv[1], "rt");
// if(!f)
// {
// fprintf( stderr, "ERROR: the specified file could not be loaded
");
// return -1;
// }
// }
// HOGDescriptor hog;
// hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector());
// namedWindow("people detector", 1);
// for(;;)
// {
// char* filename = _filename;
// if(f)
// {
// if(!fgets(filename, (int)sizeof(_filename)-2, f))
// break;
// //while(*filename && isspace(*filename))
// // ++filename;
// if(filename[0] == '#')
// continue;
// int l = strlen(filename);
// while(l > 0 && isspace(filename[l-1]))
// --l;
// filename[l] = '�';
// img = imread(filename);
// }
// printf("%s:
", filename);
// if(!img.data)
// continue;
// fflush(stdout);
// vector<Rect> found, found_filtered;
// double t = (double)getTickCount();
// // run the detector with default parameters. to get a higher hit-rate
// // (and more false alarms, respectively), decrease the hitThreshold and
// // groupThreshold (set groupThreshold to 0 to turn off the grouping completely).
// hog.detectMultiScale(img, found, 0, Size(8,8), Size(32,32), 1.05, 2);
// t = (double)getTickCount() - t;
// printf("tdetection time = %gms
", t*1000./cv::getTickFrequency());
// size_t i, j;
// for( i = 0; i < found.size(); i++ )
// {
// Rect r = found[i];
// for( j = 0; j < found.size(); j++ )
// if( j != i && (r & found[j]) == r)
// break;
// if( j == found.size() )
// found_filtered.push_back(r);
// }
// for( i = 0; i < found_filtered.size(); i++ )
// {
// Rect r = found_filtered[i];
// // the HOG detector returns slightly larger rectangles than the real objects.
// // so we slightly shrink the rectangles to get a nicer output.
// r.x += cvRound(r.width*0.1);
// r.width = cvRound(r.width*0.8);
// r.y += cvRound(r.height*0.07);
// r.height = cvRound(r.height*0.8);
// rectangle(img, r.tl(), r.br(), cv::Scalar(0,255,0), 3);
// }
// imshow("people detector", img);
// int c = waitKey(0) & 255;
// if( c == 'q' || c == 'Q' || !f)
// break;
// }
// if(f)
// fclose(f);
// return 0;
//}
效果:

