1、小区重选的目的:
LTE驻留到合适的小区,停留适当的时间(1秒钟)后,就可以进行小区重选的过程。通过小区重选,可以最大程度地保证空闲模式下的UE驻留在合适的小区。
在空闲模式下,通过对服务小区和临近小区测量值的监控,来触发小区重选。重选触发条件的核心内容就是:存在有比服务小区更好的小区,且更好小区在一段时间内都保持最好。这样一方面UE尽量重选到更好的小区去,另一方面又保证了一定的稳定性,避免频繁的重选震荡。
2、小区重选的时机
- 开机驻留到合适小区即开始小区重选
- 处于RRC_IDLE状态下UE移动
3、小区重选
在网络内再分不同频率划分优先级,最终通过对小区优先级的划分实现不同网络小区间的选择,具体如下:
小区重选:根据网络优先原则是4G>3G>2G在网络内再分不同频率划分优先级,最终通过对小区优先级的划分实现不同网络小区间的选择,具体如下:
重选原则:
1、当邻区优先级高于服务小区时,UE始终对该邻区进行测量,只要满足条件就重选
2、LTE优先选择同频段小区,当电平低到某个程度时,启动同频测量
3、当服务小区电平继续降低低到一定某个程度时,启动异频异系统门限,这里异频异系统指的是同优先级的
4、同优先级采用比较RSRP来决定重选到哪个小区
5、对低优先级小区的重选,必须同时满足服务小区要低于某个电平,低优先级小区必须高于某个电平,才会进行重选。
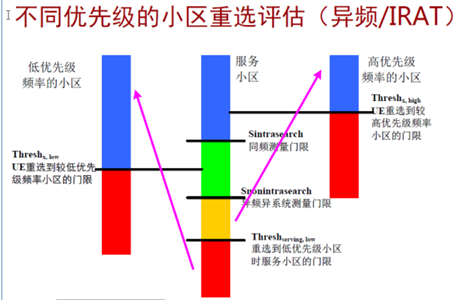
对高优先级小区的测量:
l 始终测量,不管是同频还是异频,不考虑服务小区电平
l 基于接收信号强度的重选规则(适用于所有系统):Srxlev>ThreshXHigh
对同频/同优先级测量
l 如果未配置同频测量门限,则不管当前服务小区信号质量如何,UE都将进行同频小区测量
l 如果Srxlev>SIntraSearch时,UE不进行同频小区测量
l 如果Srxlev≤SintraSearch时,UE将进行同频小区测量
对异频异系统测量
l 如果未配置异频/异系统测量门限值,则UE总是进行异频或异系统小区测量
l 如果配置了异频/异系统测量门限值:
Srxlev>SNonIntraSearch,则UE不对异频或异系统小区进行测量
Srxlev≤SnonIntraSearch,则UE将对异频或异系统小区进行测量
同频/同优先级重选准则(R准则):
R_n>R_s
服务小区:R_s=Q_(meas,s)+Q_hyst
邻小区:R_n=Q_(meas,n)+Q_offset
低优先级重选准则:
基于接收信号强度的重选规则(适用于所有系统):Srxlev_S<ThrshServLow
| R_s |
服务小区R值,单位dB |
| R_n |
邻小区R值,单位dB |
| Q_(meas,s) |
服务小区重选的RSRP值,单位dBm |
| Q_hyst |
主小区迟滞,单位dB |
| Q_(meas,n) |
邻小区重选的RSRP值,单位dBm |
| Q_offset |
邻小区偏置,单位dB |
|
ThreshXHigh |
异频/异系统高优先级重选门限,一般设22,即22db,范围0~62 |
|
SIntraSearch |
同频测量启动门限,一般设20db,范围0~62 |
|
SNonIntraSearch |
异频/异系统小区重选测量启动门限 |
|
CellQoffset |
本小区与同频邻区之间的小区偏置,用于控制小区重选的难易程度,参数值越大,越难重选到此邻区,系统消息SIB4中下发,范围-24db~24db。一般设置为0,为小区到小区的参数。 |
|
ThreshXLowQ |
异频频点RSRQ低优先级重选门限,在目标频点的RSRQ绝对优先级低于服务小区的RSRQ绝对优先级时,作为UE从服务小区重选至目标频点下小区的接入电平门限,一般设置为0,范围0~62, |
|
ThrshServLow |
服务频点向低优先级异频或异系统重选时的门限值,一般设置为10,范围0~62, |
|
ThreshXLow |
异频频点低优先级重选门限值,在目标频点的绝对优先级低于服务小区的绝对优先级时,作为UE从服务小区重选至目标频点下小区的接入电平门限,一般设置11,,范围0~62 |
|
CellReselPriority |
EUTRAN异频频点的小区重选优先级,范围0~7 |