一、spi驱动框架简介
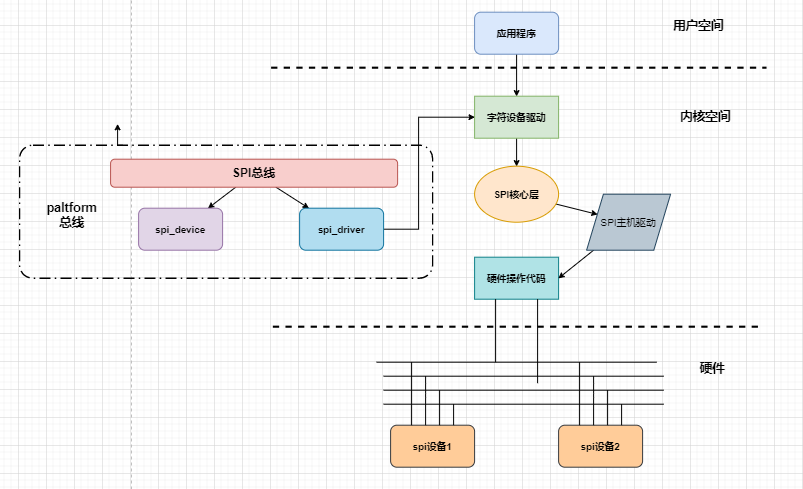
- spi核心层
提供spi控制器驱动和设备驱动的注册方法、注销方法、spi通信硬件无关接口
- spi主机驱动
主要包含spi硬件体系结构中适配器(spi控制器)的控制,用于产生spi读写时序。
- spi设备驱动
通过spi主机驱动与CPU交换数据。
二、驱动源码分析
1、spidev.c
(1)初始化
static int __init spidev_init(void)
{
int status;
/* Claim our 256 reserved device numbers. Then register a class
* that will key udev/mdev to add/remove /dev nodes. Last, register
* the driver which manages those device numbers.
*/
BUILD_BUG_ON(N_SPI_MINORS > 256);
status = register_chrdev(SPIDEV_MAJOR, "spi", &spidev_fops); //注册字符设备
if (status < 0)
return status;
spidev_class = class_create(THIS_MODULE, "spidev"); //创建设备类
if (IS_ERR(spidev_class)) {
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
return PTR_ERR(spidev_class);
}
status = spi_register_driver(&spidev_spi_driver); //注册spi驱动
if (status < 0) {
class_destroy(spidev_class);
unregister_chrdev(SPIDEV_MAJOR, spidev_spi_driver.driver.name);
}
return status;
}
(2)spi驱动定义
static struct spi_driver spidev_spi_driver = {
.driver = {
.name = "spidev",
.of_match_table = of_match_ptr(spidev_dt_ids),
.acpi_match_table = ACPI_PTR(spidev_acpi_ids),
},
.probe = spidev_probe,
.remove = spidev_remove,
/* NOTE: suspend/resume methods are not necessary here.
* We don't do anything except pass the requests to/from
* the underlying controller. The refrigerator handles
* most issues; the controller driver handles the rest.
*/
};
(3)spidev_probe
static int spidev_probe(struct spi_device *spi) { struct spidev_data *spidev; int status; unsigned long minor; /* * spidev should never be referenced in DT without a specific * compatible string, it is a Linux implementation thing * rather than a description of the hardware. */ WARN(spi->dev.of_node && of_device_is_compatible(spi->dev.of_node, "spidev"), "%pOF: buggy DT: spidev listed directly in DT\n", spi->dev.of_node); spidev_probe_acpi(spi); /* Allocate driver data */ spidev = kzalloc(sizeof(*spidev), GFP_KERNEL); if (!spidev) return -ENOMEM; /* Initialize the driver data */ spidev->spi = spi; spin_lock_init(&spidev->spi_lock); mutex_init(&spidev->buf_lock); INIT_LIST_HEAD(&spidev->device_entry); /* If we can allocate a minor number, hook up this device. * Reusing minors is fine so long as udev or mdev is working. */ mutex_lock(&device_list_lock); minor = find_first_zero_bit(minors, N_SPI_MINORS); if (minor < N_SPI_MINORS) { //次设备号小于32 struct device *dev; spidev->devt = MKDEV(SPIDEV_MAJOR, minor);
//创建spi设备 dev = device_create(spidev_class, &spi->dev, spidev->devt, spidev, "spidev%d.%d", spi->master->bus_num, spi->chip_select); status = PTR_ERR_OR_ZERO(dev); } else { dev_dbg(&spi->dev, "no minor number available!\n"); status = -ENODEV; } if (status == 0) { set_bit(minor, minors); list_add(&spidev->device_entry, &device_list); } mutex_unlock(&device_list_lock); spidev->speed_hz = spi->max_speed_hz; //设置最大速率 if (status == 0) spi_set_drvdata(spi, spidev); //设置设备驱动数据 else kfree(spidev); return status; }
(4)spidev_remove
static int spidev_remove(struct spi_device *spi)
{
struct spidev_data *spidev = spi_get_drvdata(spi);
/* prevent new opens */
mutex_lock(&device_list_lock);
/* make sure ops on existing fds can abort cleanly */
spin_lock_irq(&spidev->spi_lock);
spidev->spi = NULL;
spin_unlock_irq(&spidev->spi_lock);
list_del(&spidev->device_entry);
device_destroy(spidev_class, spidev->devt);
clear_bit(MINOR(spidev->devt), minors);
if (spidev->users == 0)
kfree(spidev);
mutex_unlock(&device_list_lock);
return 0;
}
(5)spi设备文件操作集合
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
/* REVISIT switch to aio primitives, so that userspace
* gets more complete API coverage. It'll simplify things
* too, except for the locking.
*/
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl,
.compat_ioctl = spidev_compat_ioctl,
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};
(6)读操作
/* Read-only message with current device setup */
static ssize_t
spidev_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status = 0;
/* chipselect only toggles at start or end of operation */
if (count > bufsiz)
return -EMSGSIZE;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
status = spidev_sync_read(spidev, count);
if (status > 0) {
unsigned long missing;
missing = copy_to_user(buf, spidev->rx_buffer, status);
if (missing == status)
status = -EFAULT;
else
status = status - missing;
}
mutex_unlock(&spidev->buf_lock);
return status;
}
spidev_sync_read:
static inline ssize_t
spidev_sync_read(struct spidev_data *spidev, size_t len)
{
struct spi_transfer t = {
.rx_buf = spidev->rx_buffer,
.len = len,
.speed_hz = spidev->speed_hz,
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
return spidev_sync(spidev, &m);
}
(7)写操作
/* Write-only message with current device setup */
static ssize_t
spidev_write(struct file *filp, const char __user *buf,
size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status = 0;
unsigned long missing;
/* chipselect only toggles at start or end of operation */
if (count > bufsiz)
return -EMSGSIZE;
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
missing = copy_from_user(spidev->tx_buffer, buf, count);
if (missing == 0)
status = spidev_sync_write(spidev, count);
else
status = -EFAULT;
mutex_unlock(&spidev->buf_lock);
return status;
}
spidev_sync_write:
static inline ssize_t
spidev_sync_write(struct spidev_data *spidev, size_t len)
{
struct spi_transfer t = {
.tx_buf = spidev->tx_buffer,
.len = len,
.speed_hz = spidev->speed_hz,
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
return spidev_sync(spidev, &m);
}
(8)spidev_ioctl
static long
spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int retval = 0;
struct spidev_data *spidev;
struct spi_device *spi;
u32 tmp;
unsigned n_ioc;
struct spi_ioc_transfer *ioc;
/* Check type and command number */
if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC)
return -ENOTTY;
/* guard against device removal before, or while,
* we issue this ioctl.
*/
spidev = filp->private_data;
spin_lock_irq(&spidev->spi_lock);
spi = spi_dev_get(spidev->spi);
spin_unlock_irq(&spidev->spi_lock);
if (spi == NULL)
return -ESHUTDOWN;
/* use the buffer lock here for triple duty:
* - prevent I/O (from us) so calling spi_setup() is safe;
* - prevent concurrent SPI_IOC_WR_* from morphing
* data fields while SPI_IOC_RD_* reads them;
* - SPI_IOC_MESSAGE needs the buffer locked "normally".
*/
mutex_lock(&spidev->buf_lock);
switch (cmd) {
/* read requests */读取spi的属性
case SPI_IOC_RD_MODE: //读取spi mode
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_MODE32:
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u32 __user *)arg);
break;
case SPI_IOC_RD_LSB_FIRST: //读取spi是低位优先还是高位优先
retval = put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_BITS_PER_WORD: //读取每个字 的bit位数
retval = put_user(spi->bits_per_word, (__u8 __user *)arg);
break;
case SPI_IOC_RD_MAX_SPEED_HZ: //最大速率
retval = put_user(spidev->speed_hz, (__u32 __user *)arg);
break;
/* write requests */ 这是对应的写,用于设置spi属性
case SPI_IOC_WR_MODE:
case SPI_IOC_WR_MODE32:
if (cmd == SPI_IOC_WR_MODE)
retval = get_user(tmp, (u8 __user *)arg);
else
retval = get_user(tmp, (u32 __user *)arg);
if (retval == 0) {
struct spi_controller *ctlr = spi->controller;
u32 save = spi->mode;
if (tmp & ~SPI_MODE_MASK) {
retval = -EINVAL;
break;
}
if (ctlr->use_gpio_descriptors && ctlr->cs_gpiods &&
ctlr->cs_gpiods[spi->chip_select])
tmp |= SPI_CS_HIGH;
tmp |= spi->mode & ~SPI_MODE_MASK;
spi->mode = (u16)tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "spi mode %x\n", tmp);
}
break;
case SPI_IOC_WR_LSB_FIRST:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp)
spi->mode |= SPI_LSB_FIRST;
else
spi->mode &= ~SPI_LSB_FIRST;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "%csb first\n",
tmp ? 'l' : 'm');
}
break;
case SPI_IOC_WR_BITS_PER_WORD:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u8 save = spi->bits_per_word;
spi->bits_per_word = tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->bits_per_word = save;
else
dev_dbg(&spi->dev, "%d bits per word\n", tmp);
}
break;
case SPI_IOC_WR_MAX_SPEED_HZ:
retval = get_user(tmp, (__u32 __user *)arg);
if (retval == 0) {
u32 save = spi->max_speed_hz;
spi->max_speed_hz = tmp;
retval = spi_setup(spi);
if (retval >= 0)
spidev->speed_hz = tmp;
else
dev_dbg(&spi->dev, "%d Hz (max)\n", tmp);
spi->max_speed_hz = save;
}
break;
default:
/* segmented and/or full-duplex I/O request */
/* Check message and copy into scratch area */
ioc = spidev_get_ioc_message(cmd,
(struct spi_ioc_transfer __user *)arg, &n_ioc);
if (IS_ERR(ioc)) {
retval = PTR_ERR(ioc);
break;
}
if (!ioc)
break; /* n_ioc is also 0 */
/* translate to spi_message, execute */
retval = spidev_message(spidev, ioc, n_ioc);
kfree(ioc);
break;
}
mutex_unlock(&spidev->buf_lock);
spi_dev_put(spi);
return retval;
}
2、spi平台驱动程序分析:spi_sun6i.c
(1)平台驱动定义
static const struct dev_pm_ops sun6i_spi_pm_ops = {
.runtime_resume = sun6i_spi_runtime_resume,
.runtime_suspend = sun6i_spi_runtime_suspend,
};
static struct platform_driver sun6i_spi_driver = {
.probe = sun6i_spi_probe,
.remove = sun6i_spi_remove,
.driver = {
.name = "sun6i-spi",
.of_match_table = sun6i_spi_match,
.pm = &sun6i_spi_pm_ops,
},
}
(2)sun6i_spi_probe
static int sun6i_spi_probe(struct platform_device *pdev) { struct spi_master *master; struct sun6i_spi *sspi; int ret = 0, irq; master = spi_alloc_master(&pdev->dev, sizeof(struct sun6i_spi)); if (!master) { dev_err(&pdev->dev, "Unable to allocate SPI Master\n"); return -ENOMEM; } platform_set_drvdata(pdev, master); sspi = spi_master_get_devdata(master); //获取平台设备的io资源 sspi->base_addr = devm_platform_ioremap_resource(pdev, 0); if (IS_ERR(sspi->base_addr)) { ret = PTR_ERR(sspi->base_addr); goto err_free_master; } //获取irq资源 irq = platform_get_irq(pdev, 0); if (irq < 0) { ret = -ENXIO; goto err_free_master; } //申请中断 ret = devm_request_irq(&pdev->dev, irq, sun6i_spi_handler, 0, "sun6i-spi", sspi); if (ret) { dev_err(&pdev->dev, "Cannot request IRQ\n"); goto err_free_master; } sspi->master = master; sspi->fifo_depth = (unsigned long)of_device_get_match_data(&pdev->dev);
//spi主机的初始化 master->max_speed_hz = 100 * 1000 * 1000; //spi主机最大速率 100Mhz master->min_speed_hz = 3 * 1000; //spi主机最小速率3000hz master->set_cs = sun6i_spi_set_cs; //设置片选引脚信号 master->transfer_one = sun6i_spi_transfer_one; //发送一个spi消息 master->num_chipselect = 4; //有4个片选信号 master->mode_bits = SPI_CPOL | SPI_CPHA | SPI_CS_HIGH | SPI_LSB_FIRST; //spi模式 master->bits_per_word_mask = SPI_BPW_MASK(8); //发送一个字8个字节 master->dev.of_node = pdev->dev.of_node; //设备节点 master->auto_runtime_pm = true; master->max_transfer_size = sun6i_spi_max_transfer_size; //最多发送的字节个数 0xffffff-1 sspi->hclk = devm_clk_get(&pdev->dev, "ahb"); //获取AHB总线的clk if (IS_ERR(sspi->hclk)) { dev_err(&pdev->dev, "Unable to acquire AHB clock\n"); ret = PTR_ERR(sspi->hclk); goto err_free_master; } sspi->mclk = devm_clk_get(&pdev->dev, "mod"); //获取模块clock if (IS_ERR(sspi->mclk)) { dev_err(&pdev->dev, "Unable to acquire module clock\n"); ret = PTR_ERR(sspi->mclk); goto err_free_master; } init_completion(&sspi->done); //获取复位控制器 sspi->rstc = devm_reset_control_get_exclusive(&pdev->dev, NULL); if (IS_ERR(sspi->rstc)) { dev_err(&pdev->dev, "Couldn't get reset controller\n"); ret = PTR_ERR(sspi->rstc); goto err_free_master; } /* * This wake-up/shutdown pattern is to be able to have the * device woken up, even if runtime_pm is disabled */
//恢复spi设备 ret = sun6i_spi_runtime_resume(&pdev->dev); if (ret) { dev_err(&pdev->dev, "Couldn't resume the device\n"); goto err_free_master; } pm_runtime_set_active(&pdev->dev); pm_runtime_enable(&pdev->dev); pm_runtime_idle(&pdev->dev); //注册spi主机 ret = devm_spi_register_master(&pdev->dev, master); if (ret) { dev_err(&pdev->dev, "cannot register SPI master\n"); goto err_pm_disable; } return 0; err_pm_disable: pm_runtime_disable(&pdev->dev); sun6i_spi_runtime_suspend(&pdev->dev); err_free_master: spi_master_put(master); return ret; }
- sun6i_spi_remove
static int sun6i_spi_remove(struct platform_device *pdev)
{
//强制挂机
pm_runtime_force_suspend(&pdev->dev);
return 0;
}
- sun6i_spi_match
static const struct of_device_id sun6i_spi_match[] = {
{ .compatible = "allwinner,sun6i-a31-spi", .data = (void *)SUN6I_FIFO_DEPTH },
{ .compatible = "allwinner,sun8i-h3-spi", .data = (void *)SUN8I_FIFO_DEPTH },
{}
};
(3)spi_device结构体
//spi.h
struct spi_device {
struct device dev; //spi设备
struct spi_controller *controller; //spi控制器
struct spi_controller *master; /* compatibility layer */ spi的 复制,为了向后兼容
u32 max_speed_hz;
u8 chip_select; //Chipselect, distinguishing chips
u8 bits_per_word; //定义每个字的bits位数,由spi协议决定
bool rt; //使pump线程实时优先
u32 mode; //spi模式
#define SPI_CPHA 0x01 /* clock phase */
#define SPI_CPOL 0x02 /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH 0x04 /* chipselect active high? */
#define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
#define SPI_3WIRE 0x10 /* SI/SO signals shared */
#define SPI_LOOP 0x20 /* loopback mode */
#define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
#define SPI_READY 0x80 /* slave pulls low to pause */
#define SPI_TX_DUAL 0x100 /* transmit with 2 wires */
#define SPI_TX_QUAD 0x200 /* transmit with 4 wires */
#define SPI_RX_DUAL 0x400 /* receive with 2 wires */
#define SPI_RX_QUAD 0x800 /* receive with 4 wires */
#define SPI_CS_WORD 0x1000 /* toggle cs after each word */
#define SPI_TX_OCTAL 0x2000 /* transmit with 8 wires */
#define SPI_RX_OCTAL 0x4000 /* receive with 8 wires */
#define SPI_3WIRE_HIZ 0x8000 /* high impedance turnaround */
int irq; //中断号
void *controller_state; //控制器的实时状态
void *controller_data;
char modalias[SPI_NAME_SIZE]; //驱动别名
const char *driver_override;
int cs_gpio; /* LEGACY: chip select gpio */
struct gpio_desc *cs_gpiod; /* chip select gpio desc */
uint8_t word_delay_usecs; //每个字数据之间的微秒延时
/* the statistics */
struct spi_statistics statistics; //spi传输的统计信息,包括传输的数据信息
/*
* likely need more hooks for more protocol options affecting how
* the controller talks to each chip, like:
* - memory packing (12 bit samples into low bits, others zeroed)
* - priority
* - chipselect delays
* - ...
*/
};
2、spi.c
(1)spi_init
//spi.c
static int __init spi_init(void)
{
int status;
buf = kmalloc(SPI_BUFSIZ, GFP_KERNEL);
if (!buf) {
status = -ENOMEM;
goto err0;
}
status = bus_register(&spi_bus_type); //总线注册,注册后,可以在/sys/bus目录下看到注册的总线
if (status < 0)
goto err1;
//注册spi主机类
status = class_register(&spi_master_class); //
if (status < 0)
goto err2;
//注册从机类
if (IS_ENABLED(CONFIG_SPI_SLAVE)) {
status = class_register(&spi_slave_class);
if (status < 0)
goto err3;
}
if (IS_ENABLED(CONFIG_OF_DYNAMIC))
WARN_ON(of_reconfig_notifier_register(&spi_of_notifier));
if (IS_ENABLED(CONFIG_ACPI))
WARN_ON(acpi_reconfig_notifier_register(&spi_acpi_notifier));
return 0;
err3:
class_unregister(&spi_master_class);
err2:
bus_unregister(&spi_bus_type);
err1:
kfree(buf);
buf = NULL;
err0:
return status;
}
(2)spi_bus_type定义:
struct bus_type spi_bus_type = {
.name = "spi", //总线名
.dev_groups = spi_dev_groups, //设备组
.match = spi_match_device, //spi匹配
.uevent = spi_uevent,
};
- spi_match_device :spi设备和驱动的匹配方式,
static int spi_match_device(struct device *dev, struct device_driver *drv)
{
const struct spi_device *spi = to_spi_device(dev);
const struct spi_driver *sdrv = to_spi_driver(drv);
//通过spi设备名和驱动名进行匹配
/* Check override first, and if set, only use the named driver */
if (spi->driver_override)
return strcmp(spi->driver_override, drv->name) == 0;
/* Attempt an OF style match */
if (of_driver_match_device(dev, drv)) //设备树中compatiable属性和驱动名进行匹配
return 1;
/* Then try ACPI */
if (acpi_driver_match_device(dev, drv)) //acpi匹配
return 1;
if (sdrv->id_table)
return !!spi_match_id(sdrv->id_table, spi); //通过驱动别名来进行匹配
return strcmp(spi->modalias, drv->name) == 0;
}
- spi_uevent
static int spi_uevent(struct device *dev, struct kobj_uevent_env *env)
{
const struct spi_device *spi = to_spi_device(dev);
int rc;
rc = acpi_device_uevent_modalias(dev, env);
if (rc != -ENODEV)
return rc;
return add_uevent_var(env, "MODALIAS=%s%s", SPI_MODULE_PREFIX, spi->modalias);
}
(3)spi_master_class定义:
static struct class spi_master_class = {
.name = "spi_master",
.owner = THIS_MODULE,
.dev_release = spi_controller_release,
.dev_groups = spi_master_groups,
};
(4)spi驱动注册
/**
* __spi_register_driver - register a SPI driver
* @owner: owner module of the driver to register
* @sdrv: the driver to register
* Context: can sleep
*
* Return: zero on success, else a negative error code.
*/
int __spi_register_driver(struct module *owner, struct spi_driver *sdrv)
{
sdrv->driver.owner = owner;
sdrv->driver.bus = &spi_bus_type;
sdrv->driver.probe = spi_drv_probe;
sdrv->driver.remove = spi_drv_remove;
if (sdrv->shutdown)
sdrv->driver.shutdown = spi_drv_shutdown;
return driver_register(&sdrv->driver);
}
EXPORT_SYMBOL_GPL(__spi_register_driver);
- spi_drv_probe
static int spi_drv_probe(struct device *dev)
{
const struct spi_driver *sdrv = to_spi_driver(dev->driver);
struct spi_device *spi = to_spi_device(dev);
int ret;
ret = of_clk_set_defaults(dev->of_node, false); //获取设备树中的clock属性,并设置clock
if (ret)
return ret;
if (dev->of_node) {
spi->irq = of_irq_get(dev->of_node, 0); //获取spi终端
if (spi->irq == -EPROBE_DEFER)
return -EPROBE_DEFER;
if (spi->irq < 0)
spi->irq = 0;
}
ret = dev_pm_domain_attach(dev, true); //将spi设备加进PM域,用于节省电源能耗
if (ret)
return ret;
if (sdrv->probe) {
ret = sdrv->probe(spi);
if (ret)
dev_pm_domain_detach(dev, true);
}
return ret;
}
- spi_remove
static int spi_drv_remove(struct device *dev)
{
const struct spi_driver *sdrv = to_spi_driver(dev->driver);
int ret = 0;
if (sdrv->remove)
ret = sdrv->remove(to_spi_device(dev));
dev_pm_domain_detach(dev, true); //spi驱动移除后,要将spi设备从pm域中去掉
return ret;
}