1、超声波模块简介
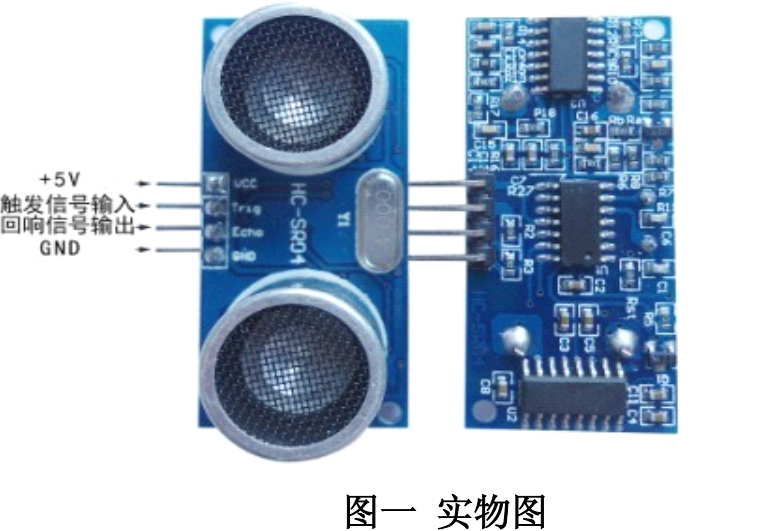
如上图接线,VCC供3.3v~5V电源,GND为地线,TRIG触发控制信号输入,ECHO回响信号输出等四个接口端。
- 品牌:HC-SR04
- 可提供2cm~400cm的非接触式的距离感测功能
- 精度高达3mm.
- 模块包括声波发射器、接收器与控制电路。
- 工作电压:3.3V-5V.
2、基本工作原理
(1)采用IO口TRIG触发测距,给最少10us 的高电平信号。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO口 ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
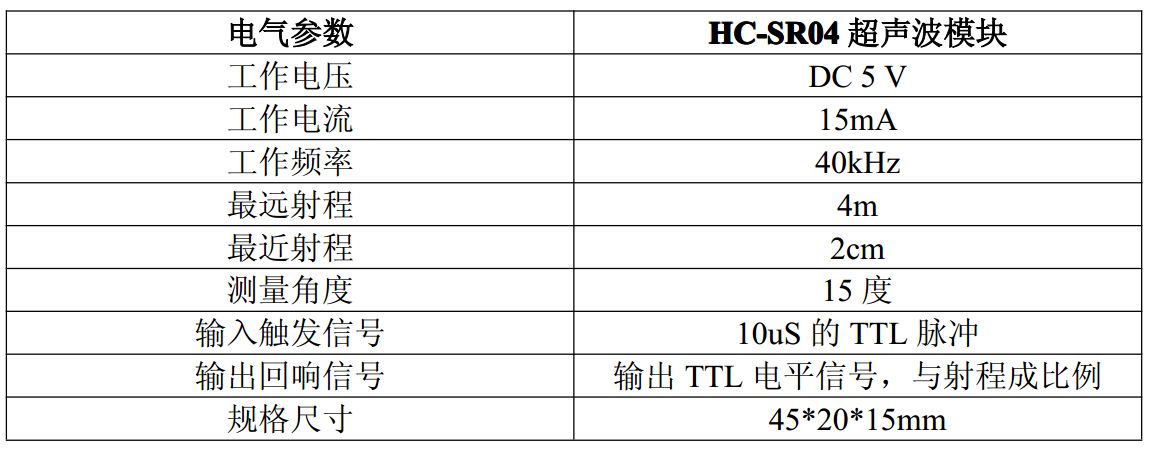
3、电气参数
4、超声波时序图

以上时序图表明你只需要TRIG脚提供一个10uS以上脉冲触发信号,该模块内部将发出8个40kHz周期电平并检测回波。--旦检测到有回波信号则输出回响信号。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。公式: uS/58=厘米或者 uS/148=英寸;或是:距离=高电平时间*声速(340M/S) /2;建议测量周期为60ms以上,以防止发射信号对回响信号的影响。
注:
- 此模块不宜带电连接,若要带电连接,则先让模块的GND端先连接,否则会影响模块的正常工作。
- 测距时,被测物体的面积不少于0.5平方米且平面尽量要求平整,否则影响测量的结果。
此实验将超声波模块接到STM32F407ZT06的camera脚上进行实验。

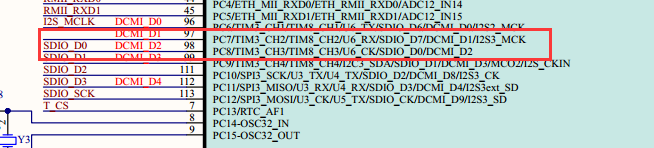
如上图,超声波模块的TRIG脚接到DCMI_D1(即接到STM32的PC7脚,),ECHO接到DCMI_D2(PC8)
- 由时序图上可以看出TRIG作为输出脚,先输出低电平,再输出一个至少10us高电平的触发信号给模块。
- 模块内部会发8个40KHZ周期电平并检测回波。(发到模块内部,不是发到ECHO脚,所以代码中不用处理这个电平)。
- 一旦检测到回波,模块则会通过ECHO脚(对于MCU是输入)输出回响信号(即高电平),通过MCU收到的高电平信号的时间就可以算出距离。距离=高电平时间*声速(340m/s)/2,(因为超声波发出去再反射回来,所以测出来的距离要除以2)。
5、代码
//Sr.04文件 { GPIO_InitTypeDef GPIO_InitStruct; //1.初始化时钟 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); //2.初始化硬件 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;//PC8 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;//输出模式 GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;//推挽输出 GPIO_InitStruct.GPIO_Speed = GPIO_Fast_Speed;//速度 快速 25MHz GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;//上拉 GPIO_Init(GPIOC,&GPIO_InitStruct); GPIO_InitStruct.GPIO_Pin = GPIO_Pin_7;//PC1 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;//输出模式 GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;//推挽输出 GPIO_InitStruct.GPIO_Speed = GPIO_Fast_Speed;//速度 快速 25MHz GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;//上拉 GPIO_Init(GPIOC,&GPIO_InitStruct); } uint32_t Get_Sr04_Distance(void) { uint32_t t=0; //空闲状态 PCout(7)=0; delay_us(5); //1.TRIG触发信号 ----是一个至少10us的高电平 PCout(7)=1; delay_us(12); PCout(7)=0; //2.模块自动发送8个40KHz的方波,我们不用管 //3.计算高电平持续时间 while(!PCin(8));//把低电平跑完 while(PCin(8))//只需要算出这个循环持续的时间就是高电平持续时间 { //340m/s-->340000mm/1000000us=0.34mm/us //3mm/0.34 = 8.82....us 约等于 9us 也就是说一个3mm就需要9us delay_us(9); t++;//一个t就对应一个3mm } t=t/2;//超声波一个来回,所以除以2 return (3*t);//返回的是mm级别 }