1.滤波
2.对象识别
激光点云:基于深度学习的点云目标检测方法;https://blog.csdn.net/dQCFKyQDXYm3F8rB0/article/details/83745697
3.对象跟踪
4.传感器融合
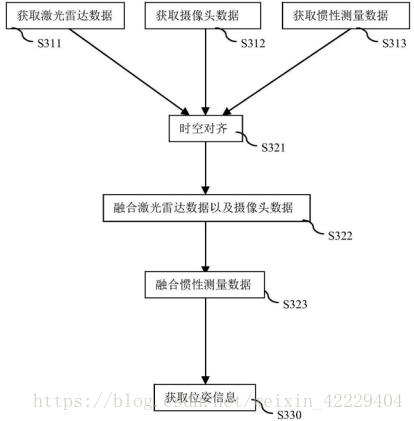
融合算法利用摄像头与雷达的目标信息作为输入(主要是用雷达的dx,摄像头的αL和αR,dy,Vy);雷达传感器优势在于能准确估计纵向距离dx与纵向的相对速度Vx;摄像头优势在于能准确估计横向距离dy,横向相对速度Vy
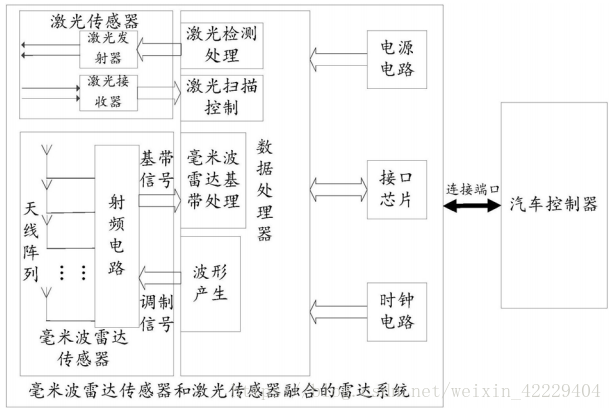
4.1 激光+毫米波雷达
激光:精度;毫米波雷达:天气
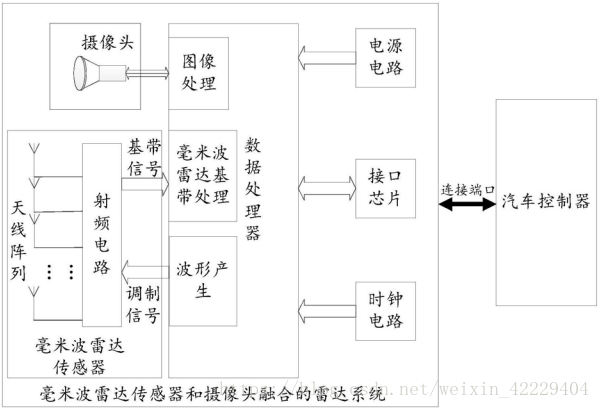
4.2 毫米波+摄像头
4.3常用算法
随机类方法有加权平均法、卡尔曼滤波法、多贝叶斯估计法、Dempster-Shafer(D-S)证据推理、产生式规则等;而人工智能类则有模糊逻辑理论、神经网络、粗集理论、专家系统等。
Central Limit Theorem 中心极限定理
Kalman filter 卡尔曼滤波
Bayesian networks 贝叶斯网络
Dempster-Shafer D-S理论