1.归一化图像坐标
2.本质矩阵 essential matrix
2.1 本质矩阵的推导
2.2特点
3.相机内参
4.基本矩阵 fundamental matrix
4.2基本矩阵推导
4.1特点
5.完整模型:空间点到像素坐标
6.单应矩阵 homography matrix
2.本质矩阵 essential matrix
2.1 本质矩阵的推导
2.2特点
3.相机内参
4.基本矩阵 fundamental matrix
4.2基本矩阵推导
4.1特点
5.完整模型:空间点到像素坐标
6.单应矩阵 homography matrix
- 参考barfoot 书 p195-
1.归一化图像坐标
- 这里相机坐标系为,图像和坐标为O,这里假设焦距为1;图像坐标中心早光轴上。
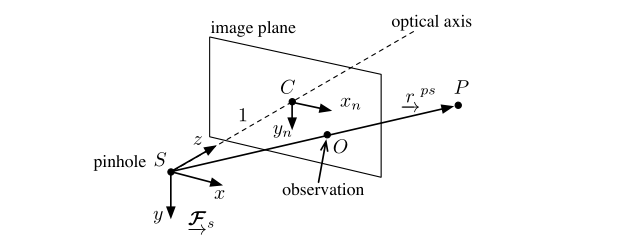
空间中点P在摄像机坐标系下的三维坐标:
利用三角近似关系,P点的图像坐标(齐次坐标);
同时假设已知图像坐标,反推会发现只能得到空间坐标的两个约束关系,或者说Z可以是任意值都满足约束关系,即深度无法得到;
2.本质矩阵 essential matrix
2.1 本质矩阵的推导
相机在不同时刻两帧图像同时观察到空间点P,如图:
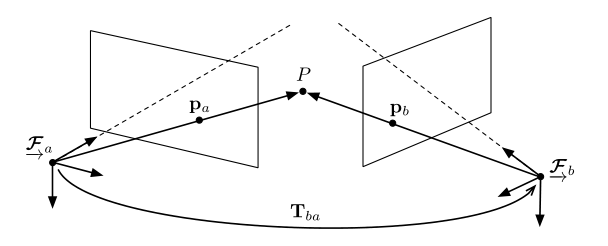
P在两帧上的图像坐标满足几何约束:

其中称为本质矩阵,其参数由运动的pose决定,与相机内参无关;本质矩阵在位姿估计和相机标定上很有用;
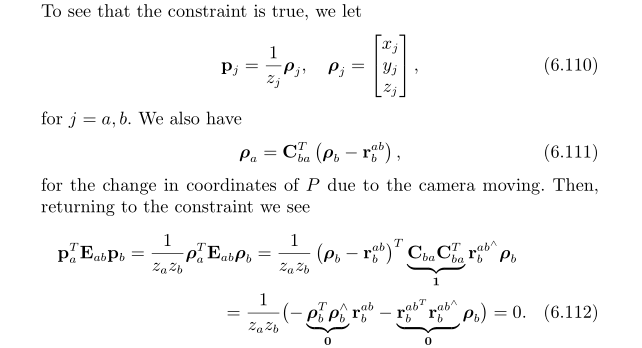
约束关系的证明:
2.2特点
- 描述空间中一点在不同帧之间的几何约束关系
- 注意这里的图像坐标是空间点在相机平面投影点的齐次坐标(摄像机坐标系下表示)
- 本质矩阵和相机外参有关系,和内参无关
3.相机内参
- 这里采用假设焦距为1,图像中心在光轴上,图像像素坐标的原点图像左上角,像素坐标值单位都是像素(整数小格);

- 像素坐标和归一化图像坐标(可以理解为空间点在平面投影几何坐标的齐次形式)的关系可以描述为:
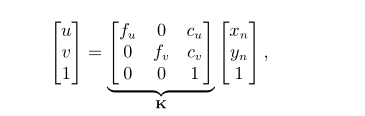
- K为相机内参矩阵,是焦距f的像素坐标,是图像中心与图像和光轴交点的偏置(理想情况应该两点重合);考虑到实际像素感光元是正方形的,参数应该对应近似相等;
4.基本矩阵 fundamental matrix
4.2基本矩阵推导
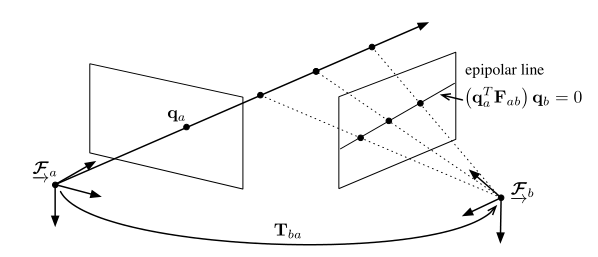
- 将图像归一化坐标替换为像素点坐标,得到基本矩阵约束(极线约束 epipolar constraint)

- 这里的基本矩阵约束称为极线约束,如下图,如果两帧之间的一个点坐标,外参矩阵已知,则空间点在另外一帧的坐标被约束在一条极线上,可以用来缩小图像匹配点的搜索范围
- 基本矩阵也可以用来极端内参矩阵
4.1特点
- 基本矩阵描述的是不同帧之间同一空间点像素坐标的几何约束关系,由本质矩阵约束中的归一化图像点替换为像素坐标点得到;
- 基本矩阵和相机内参,外参都有关系
- 基本矩阵描述的约束又称为极线约束
5.完整模型:空间点到像素坐标
- 空间点在相机坐标系的坐标到像素坐标的转换关系:
P为齐次坐标到而为坐标的映射矩阵,这个模模型清晰的表示出深度信息的丢失,即无法从像素坐标估计出深度信息。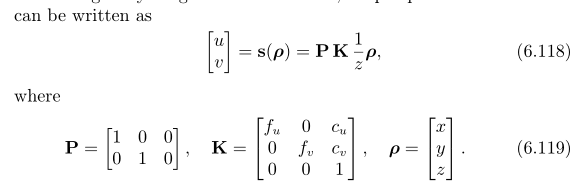
6.单应矩阵 homography matrix
- 空间点三维坐标到像素坐标(齐次形式)的转换:
- 如果已知观察的点在某个平面上,利用平面方程的先验信息可以估计出深度
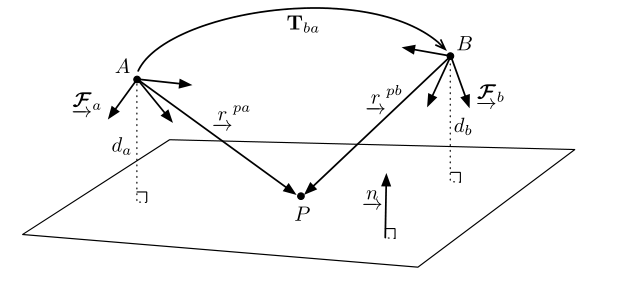
- 已知相机中心到平面距离和法向量,可以得平面的法线方程

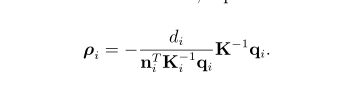
- 将空间坐标替换为像素坐标:

替换掉,得到由像素齐次坐标到空间坐标的转换
空间点在前后两帧坐标系下的三维坐标的约束关系
带入第一个公式,得到两帧之间同一空间点的像素点坐标的约束关系
将上述公式简写为:

矩阵称为单应矩阵,其中用来度量图像的齐次坐标,可以去掉;所以单应矩阵是pose和平面参数的矩阵;