代码地址:https://bitbucket.org/rodrigob/doppia/src
stereo_matching下的几个目录相当于这几篇论文中求stixel的几个步骤
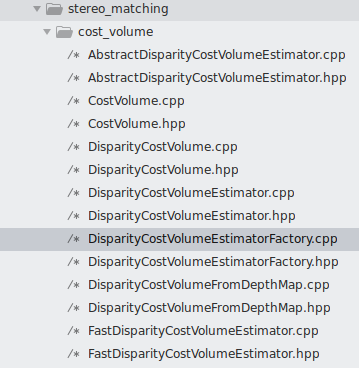
cost_volume相当于
FastDisparityCostVolumeEstimator是实现的Fast stixels estimation for fast pedestrian detection这篇论文
DisparityCostVolumeEstimator是实现的Stixels estimation without depth map computation、Pedestrian detection at 100 frames per secon,这2篇论文的方法是一样的
DisparityCostVolumeFromDepthMap是实现的The Stixel World - A Compact Medium Level Representation of the 3D-World
这三个函数都继承了AbstractDisparityCostVolumeEstimator,可以把AbstractDisparityCostVolumeEstimator当做一个公共的类.AbstractDisparityCostVolumeEstimator引用了DisparityCostVolume,DisparityCostVolume又引用了CostVolume,所以这3个函数相当于都引用了这两个函数
DisparityCostVolumeEstimatorFactory应该就是一个工程类了,这个的cpp代码可以看出整个cost_volume的结构

ground_plane就是求freespace
GroundPlaneEstimator、FastGroundPlaneEstimator都继承BaseGroundPlaneEstimator
BaseGroundPlaneEstimator继承了AbstractGroundPlaneEstimator,并且同时引用了GroundPlaneMovingAverage
AbstractGroundPlaneEstimator引用了GroundPlane