用rviz之前需要安装arbotix
在catkin_ws/src中
git clone https://github.com/vanadiumlabs/arbotix_ros.git
回到catkin_ws目录,用catkin_make
这样就安装好了arbotix
然后安装rbx_vol_1
在catkin_ws/src中
git clone https://github.com/pirobot/rbx1
同样回到catkin_ws目录,用catkin_make
编译结束用
roslaunch rbx1_bringup fake_pi_robot.launch
运行模拟机器人(别忘了roscore命令)
这时候是看不到的
再运行
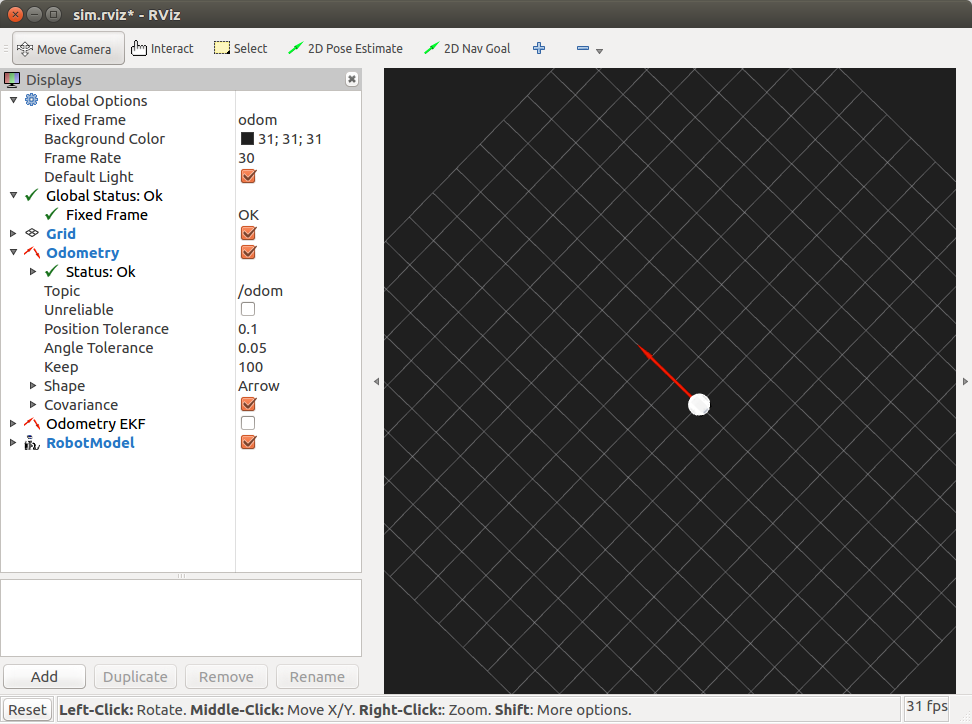
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
就可以看到小车仿真
这里的标点符号是左上角esc下面的 ` 而不是 ‘
这里可能会遇到一些问题,比如
- 遇到
Global Status Error
可以用
rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 map my_frame 100
- 遇到没有出现小车,是因为在catkin_make之后,还需要运行
source /path/to/your/catkin_ws/devel/setup.bash
- 另一个问题见
https://www.cnblogs.com/yjqjy/p/10473566.html
- 在最初roscore中还需要了问题,问题说是没有安装,在解决问题又出现问题的过程中,发现是因为自己把电脑环境搞复杂了,既安装了python2.7(自带的),也安装了python3.6. 为了管理安装了anaconda,
最后的解决办法是在bashrc文件中把anaconda注释掉,同时把默认python改为2.7版本,才解决好。当然这不是最好的办法,将2.7和3.6分开,也涉及了pip和pip3,安装pip之前还要安装setuptools。具体可以参考
https://blog.csdn.net/weixin_38725737/article/details/81084153
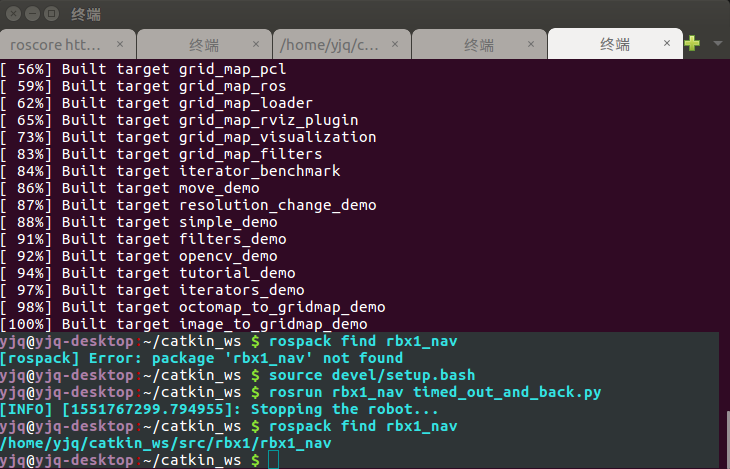
- 遇到如图
[rospack] Error: package 'rbx1_nav' not found
应该
1 catkin_make 2 source devel/setup.bash
这样再
- 遇到的各种 no moudle named 'xxx' 问题一般都是python版本的原因
- anaconda 运用命令activate可以进入虚拟base空间,表现为terminal前有 (base)
- 还有遇到的依赖矛盾问题,大概意思是说安装a和b需要不同版本的c,这时候可以指定版本安装