Ubuntu16.04安装ROS Kinetic详细过程 - 古月居 (guyuehome.com)
Ubuntu16.04安装ROS Kinetic详细过程
-
- 1、设置sources.list
- 2、设置key(公钥已更新)
- 3、更新package
- 4、安装ROS kinetic完整版
- 5、初始化rosdep
- 6、配置ROS环境
- 7、安装依赖项
- 8、测试ROS是否安装成功
1、设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置成清华的源:
参考:https://www.bilibili.com/video/BV1VF41167Vp/?spm_id_from=333.337.search-card.all.click&vd_source=1b703ff170897441644f9890b98009c6
sudo sh -c '. /etc/lsb-release && echo "deb http://mirros.tuna.tsinghua.edu.cn/ros/ubuntu $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置key之前设置密钥:
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

3、更新package
sudo apt-get update
4、安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full5、初始化rosdep
注意:在使用ROS之前需要初始化rosdep
sudo rosdep init
rosdep update
当运行sudo rosdep init的时候(xps 15 9550-ubuntu虚拟机)出现下面这个问题:
qin@dell:~$ sudo rosdep init ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.
参考解决办法:
rosdep init ROS安装问题解决方案 - 古月居 (guyuehome.com)
假如无法从raw.githubusercontent.com更新rosdep,
qin@qin-virtual-machine:~$ rosdep update reading in sources list data from /etc/ros/rosdep/sources.list.d ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml]: <urlopen error timed out> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml) ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml]: <urlopen error ('_ssl.c:574: The handshake operation timed out',)> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml)
参考解决办法是:
https://blog.csdn.net/qq_30267617/article/details/115028689
终极办法:
(三)方法三
前面说了rosdep update做的事情就是根据20-default.list文件中的网址链接("raw.githubusercontent.com")去下载相应的文件,既然用网络下载不了,能不能手动下载呢?答案是可以的。
raw.githubusercontent.com实际上就是github的用户数据服务器,rosdep程序下载的就是github.com/ros/rosdistro这个repository里的文件。
执行下面的命令:
git clone https://github.com/ros/rosdistro.git
(当然也可以直接去https://github.com/ros/rosdistro.git点Download Zip下载)
注:我利用git clone https://github.com/ros/rosdistro.git下载后不知道下载哪里去了,所以还是从github上下载源码。
https://github.com/search?q=rosdistro
网速可能会有点慢,这里我也提供免费下载:ROS安装文件rosdistro-master.zip。会在当前目录下载进一个名为rosdistro-master.zip的文件夹,前面说的那些文件都在里面。
首先将这个文件解压,然后放到一个新的目录下,我放到了/etc/ros下,执行命令(具体的路径根据你的目录修改)
sudo cp -r /home/ubuntu/Documents/rosdistro-master /etc/ros
我的路径是这样的:
sudo cp -r /home/qin/rosdistro-master /etc/ros
首先修改20-default.list,执行:
sudo gedit /etc/ros/rosdep/sources.list.d/20-default.list
将里面链接到"raw.githubusercontent.com"的内容全部替换为链接到本地文件,最后20-default.list的内容是这样的(具体的文件路径根据你放的位置更改):
# os-specific listings first #yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx yaml file:///etc/ros/rosdistro-master/rosdep/osx-homebrew.yaml osx # generic #yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml #yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml #yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml #gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte yaml file:///etc/ros/rosdistro-master/rosdep/base.yaml yaml file:///etc/ros/rosdistro-master/rosdep/python.yaml yaml file:///etc/ros/rosdistro-master/rosdep/ruby.yaml gbpdistro file:///etc/ros/rosdistro-master/releases/fuerte.yaml fuerte # newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
然后修改下面三个文件,同样将其中链接到"raw.githubusercontent.com"的内容全部替换为链接到本地文件。可以使用Ctrl+F 查找 raw.githubusercontent.com,每个文件当中都有一处需要修改。
1. /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
2. /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
3. /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
修改方法如下:
修改gbpdistro_support.py,执行:
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
使用Ctrl+F定位到raw.githubusercontent.com这一行(使用Ctrl+F 查找),注释掉原来的链接改为本地文件,修改的内容如下面所示:
# FUERTE_GBPDISTRO_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml' FUERTE_GBPDISTRO_URL = 'file:///etc/ros/rosdistro-master/releases/fuerte.yaml'
文件里面截图是这样的:

修改rep3.py,执行:
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
同样定位到raw.githubusercontent.com这一行(使用Ctrl+F 查找),注释掉原来的链接改为本地文件,修改的内容如下面所示:
# REP3_TARGETS_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml'
REP3_TARGETS_URL = 'file:///etc/ros/rosdistro-master/releases/targets.yaml'
修改__init__.py,执行:
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
同样定位到raw.githubusercontent.com这一行(使用Ctrl+F 查找),注释掉原来的链接改为本地文件,修改的内容如下面所示:
# DEFAULT_INDEX_URL = 'https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml'
DEFAULT_INDEX_URL = 'file:///etc/ros/rosdistro-master/index-v4.yaml'
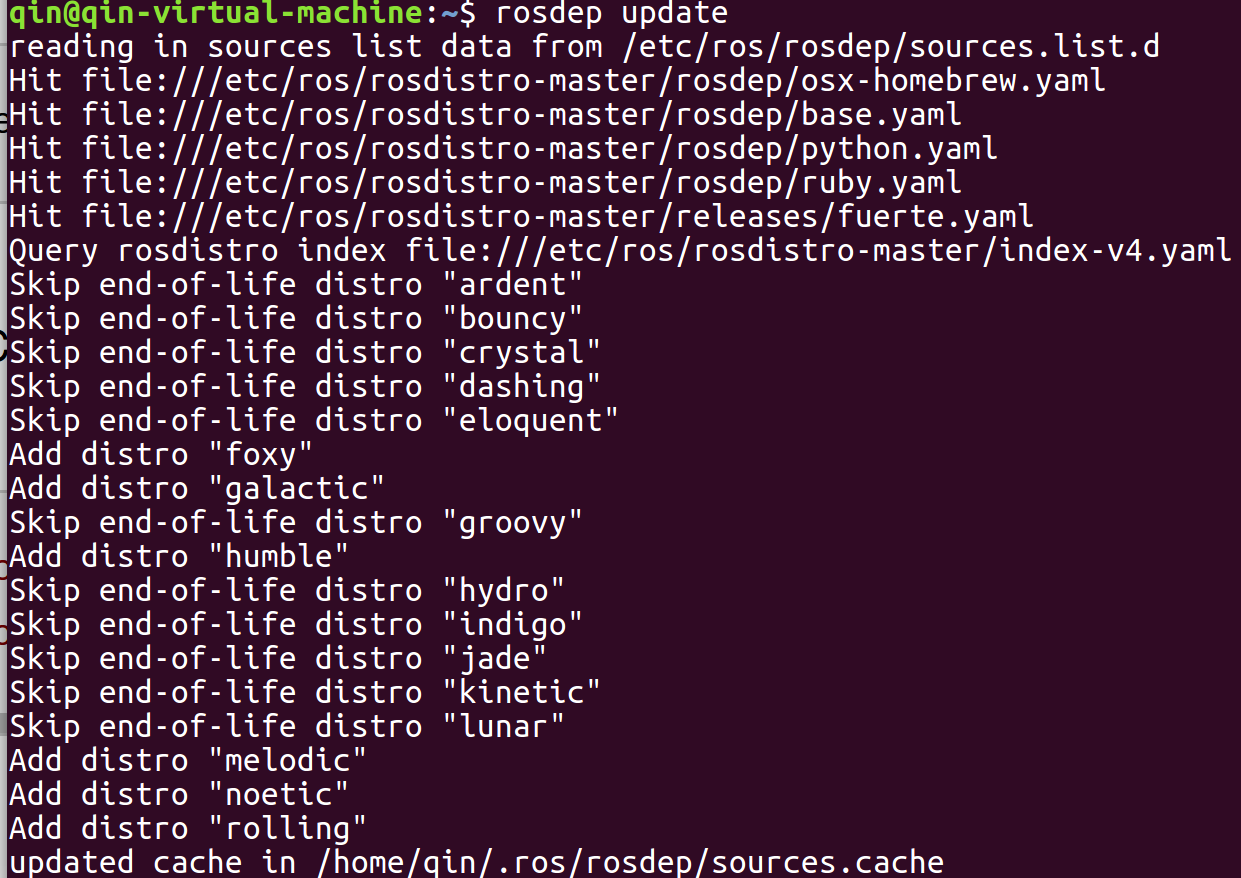
好了,再次执行rosdep update,这次肯定是要成功了,结果如下面所示。
6、配置ROS环境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc7、安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
下面一段文字的内容来自:https://github.com/AbangLZU/ad_with_lanelet2
For Ubuntu, the steps are the following:
- Set up ROS, and install at least
rospack,catkinandmrt_cmake_modules(e.g.ros-melodic-rospack,ros-melodic-catkin,ros-melodic-mrt-cmake-modules):
sudo apt-get install ros-melodic-rospack ros-melodic-catkin ros-melodic-mrt-cmake-modules ros-melodic-unique-id
当安装:
sudo apt-get install ros-melodic-rospack
的时候,出现下面的错误(dell 5820):
dell@dell-Precision-5820-Tower:~$ sudo apt-get install ros-melodic-rospack Reading package lists... Done Building dependency tree Reading state information... Done E: Unable to locate package ros-melodic-rospack
- Install the dependencies above:
sudo apt-get install libboost-dev libeigen3-dev libgeographic-dev libpugixml-dev libpython-dev libboost-python-dev python-catkin-tools
On 16.04 and below, mrt_cmake_modules is not available in ROS and you have to clone it into your workspace (git clone https://github.com/KIT-MRT/mrt_cmake_modules.git).
Building
As usual with Catkin, after you have sourced the ros installation, you have to create a workspace and clone all required packages there. Then you can build.
source /opt/ros/$ROS_DISTRO/setup.bash
mkdir catkin_ws && cd catkin_ws && mkdir src
catkin init
catkin config --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo # build in release mode (or whatever you prefer)
cd src
git clone https://github.com/fzi-forschungszentrum-informatik/lanelet2.git
cd ..
catkin build
注意:
执行git clone https://github.com/fzi-forschungszentrum-informatik/lanelet2.git的时候出现错误:
qin@qin-virtual-machine:~/catkin_ws/src$ git clone https://github.com/fzi-forschungszentrum-informatik/lanelet2.git Cloning into 'lanelet2'... fatal: unable to access 'https://github.com/fzi-forschungszentrum-informatik/lanelet2.git/': Failed to connect to github.com port 443: Connection refused
解决办法,换源:
# 正常git clone git clone https://github.com/username/xxx.git # 换源1 -> [github.com.cnpmjs.org] git clone https://github.com.cnpmjs.org/fzi-forschungszentrum-informatik/lanelet2.git
# 换源2 -> [github.com.cnpmjs.org]
git clone https:/github.com.cnpmjs.org/fzi-forschungszentrum-informatik/lanelet2.git
依然是不行的。。。
最后手动下载lanelet2.
8、测试ROS是否安装成功
(1)、CTRL+ALT+T打开终端(Termial),输入以下命令,初始化ROS环境:
roscore成功打开如下图所示:
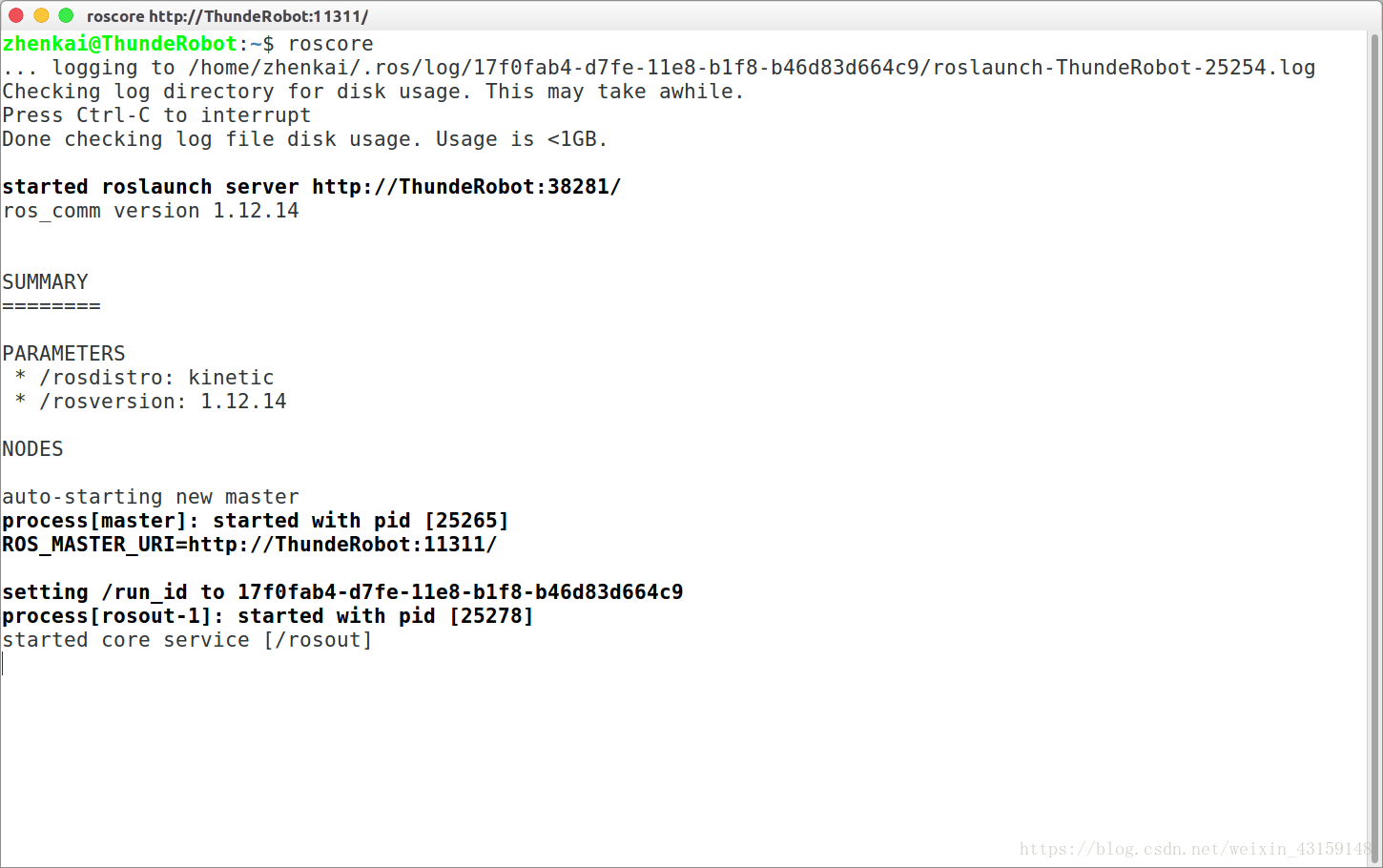
上面显示有ROS的版本,还有一些节点、端号等内容。
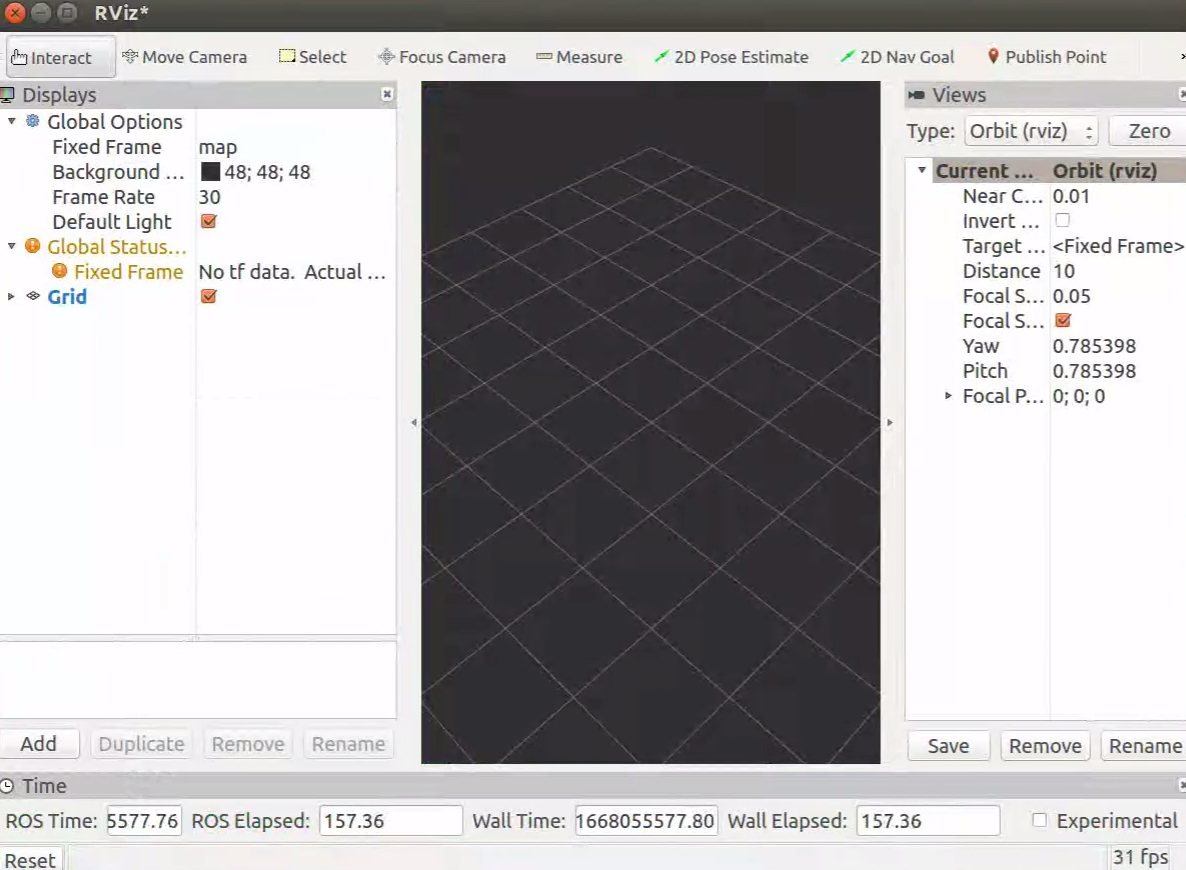
这个时候可以新打开一个终端,打入:rviz,就会出现下面的界面了:
(2)、再 打开一个新的终端(Termial),输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node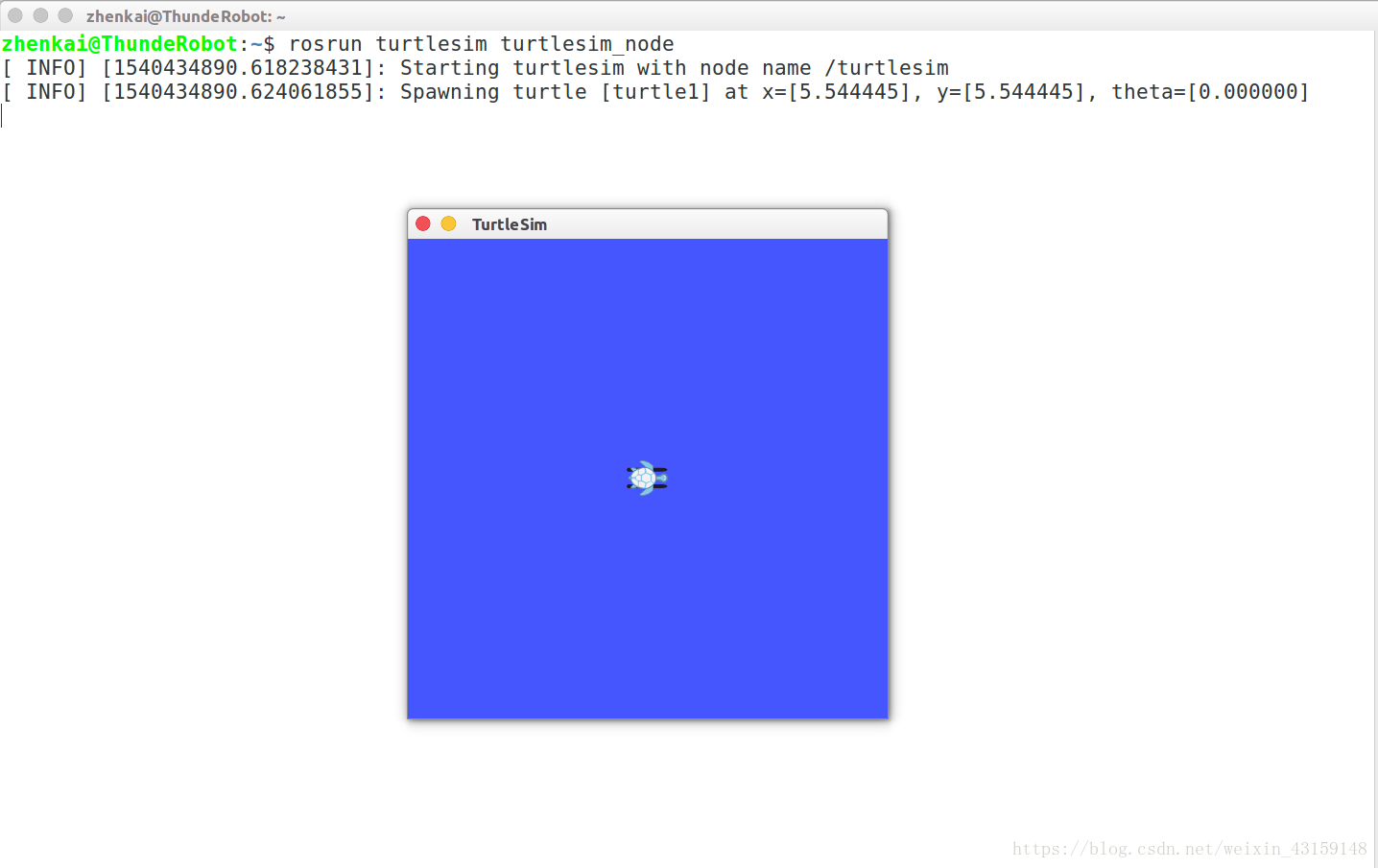
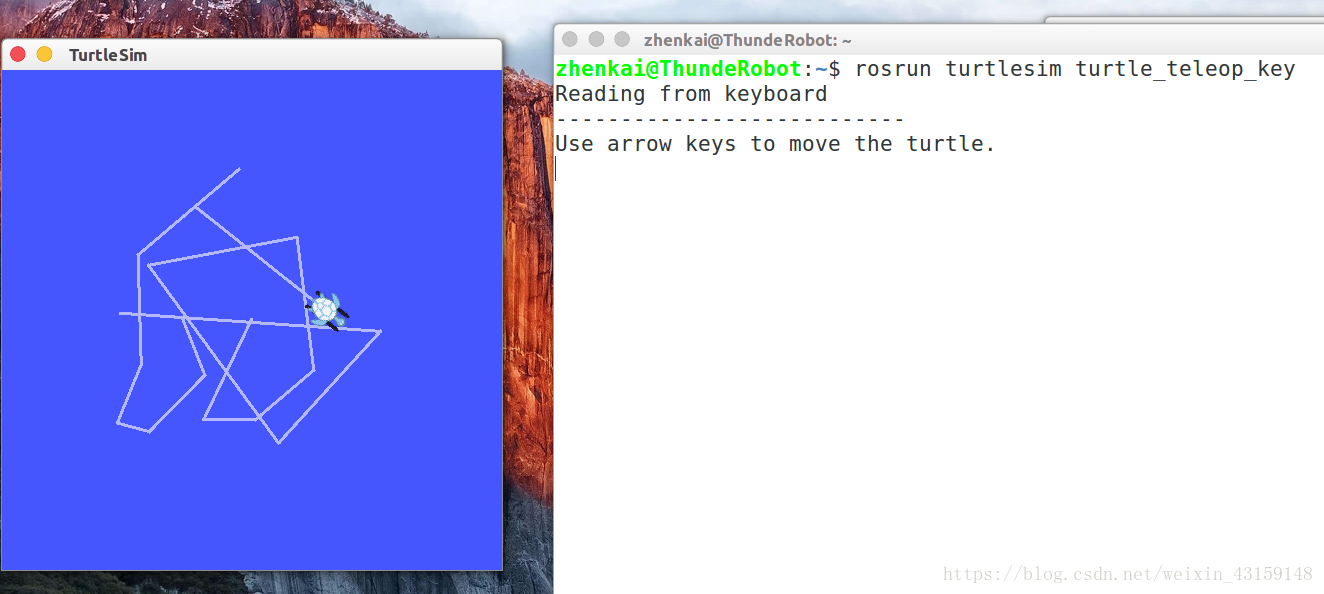
(3)、出现一个小乌龟的LOGO后,再 打开一个新的终端(Termial),输入以下命令
rosrun turtlesim turtle_teleop_key
然后,通过方向键控制小乌龟的移动:如下图所示
(4)、 打开新的Termial,输入以下命令,可以查看ROS节点信息:
rosrun rqt_graph rqt_graph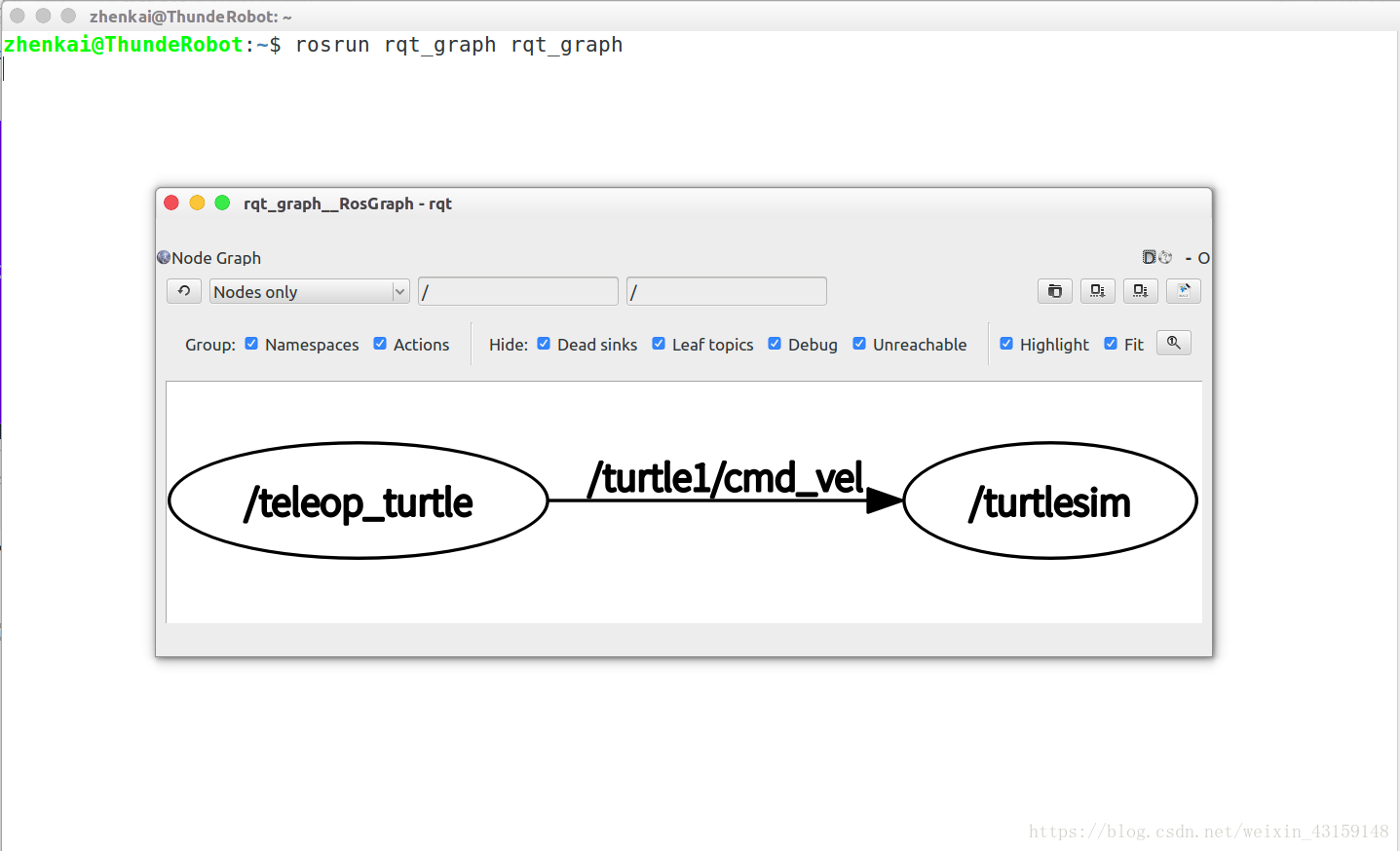
如果你能顺利进行到这一步,说明ROS安装成功了。
如果大家在安装的过程中出现问题或者错误(ERROR),可以给我留言,大家可以相互交流一些。