代码参考:https://blog.csdn.net/weixin_39373480/article/details/88934146
def recognize_all_data(test_area = 5): ALL_FILES = getDataFiles('/home/dell/qcc/pointnet/code/Pointnet_Pointnet2_pytorch-master/data_utils/data/indoor3d_sem_seg_hdf5_data/all_files.txt') room_filelist = [line.rstrip() for line in open('/home/dell/qcc/pointnet/code/Pointnet_Pointnet2_pytorch-master/data_utils/data/indoor3d_sem_seg_hdf5_data/room_filelist.txt')] data_batch_list = [] label_batch_list = [] for h5_filename in ALL_FILES: data_batch, label_batch = loadDataFile('/home/dell/qcc/pointnet/code/Pointnet_Pointnet2_pytorch-master/data_utils/data/' + h5_filename) data_batch_list.append(data_batch) label_batch_list.append(label_batch) data_batches = np.concatenate(data_batch_list, 0) label_batches = np.concatenate(label_batch_list, 0)
ALL_FILES:24个.h5格式的点云文件,每个.h5文件包含1000个场景(最后一个.h5文件包含585个场景,共有场景23585个),每个场景有4096个点云及其对应标签。
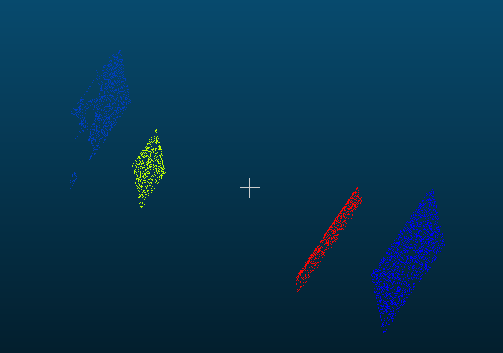
其中18~29场景可视化如下图(点云数据本身包含有RGB颜色信息):
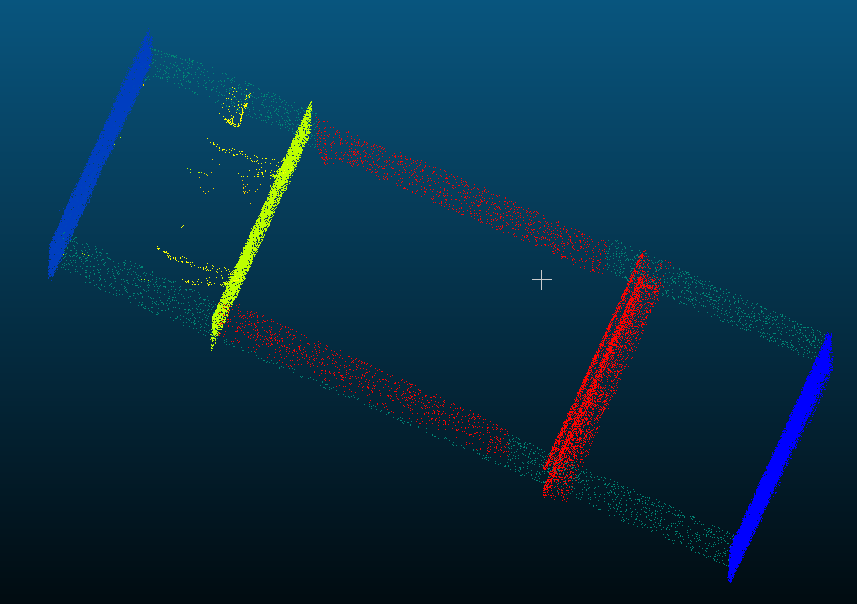
第18个场景:
room_filelist: 室内场景共6个区域的23585个点云文件。