Nguyen, V., et al. (2007)."A comparison of line extraction algorithms using 2D range data for indoor mobile robotics." Autonomous Robots 23(2): 97-111.
论文提出了6中从二维激光扫描数据中提取线段的方法
1.分割合并算法
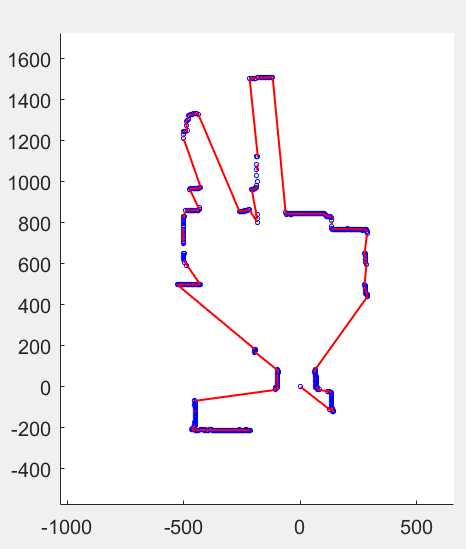
有的时候十分烦那些斜着的连线,实际不是想要的。
2.回归方法
先聚类,再回归
3.累积、区域生长算法
感觉对噪声数据真的没办法了,窝成一团的点,提取的线十分破碎而且乱...


1 function [ lineSegCoord ] = extractLineSegment( model,normals,intervalPts,normalDelta,dThreshold) 2 %EXTRACTLINESEGMENT Summary of this function goes here 3 % Detailed explanation goes here 4 if (nargin == 0) || isempty(model) 5 lineSegCoord = []; 6 return; 7 end; 8 ns = createns(model','NSMethod','kdtree') 9 pts=size(model,2); 10 if (nargin == 3) 11 normalDelta=0.9; 12 dThreshold=0.5; 13 end 14 if isempty(normals) 15 normals=zeros(2,pts); 16 for nor=1:pts 17 [idx, dist] = knnsearch(ns,model(:,nor)','k',2); 18 data=model(:,idx); 19 men=mean(data,2); 20 rep= repmat(men,1,size(data,2)); 21 data = data - rep; 22 % Compute the MxM covariance matrix A 23 A = cov(data'); 24 % Compute the eigenvector of A 25 [V, LAMBDA] = eig(A); 26 % Find the eigenvector corresponding to the minimum eigenvalue in A 27 % This should always be the first column, but check just in case 28 [~,idx] = min(diag(LAMBDA)); 29 % Normalize 30 V = V(:,idx)./norm(V(:,idx)); 31 %定向 32 normals(:,nor)=V; 33 end 34 end 35 36 lineSeg=[1;1]; 37 newLineIdx=1; 38 for j=2:pts-1 39 current=model(:,j); 40 pre=model(:,j-1); 41 next=model(:,j+1); 42 curNormal=normals(:,j); 43 preNormal=normals(:,j-1); 44 nextNormal=normals(:,j+1); 45 [d,vPt]=Dist2D_Point_to_Line(current,pre,next); 46 dis=norm(current-pre); 47 delta=dot(curNormal,preNormal)/(norm(curNormal)*norm(preNormal)); 48 if(delta>normalDelta&& d<dThreshold) %注意两个阈值 49 lineSeg(2,newLineIdx)=lineSeg(2,newLineIdx)+1;%点数 50 else 51 newLineIdx=newLineIdx+1; 52 lineSeg=[lineSeg [1; 1]]; 53 lineSeg(1,newLineIdx)=lineSeg(1,newLineIdx-1)+ lineSeg(2,newLineIdx-1);%起始点索引 54 end 55 end 56 indexLs=1; 57 lineSegCoord=[]; 58 for k=1:size(lineSeg,2) 59 from=lineSeg(1,k); 60 to=from+lineSeg(2,k)-1; 61 if(lineSeg(2,k) > intervalPts) 62 try 63 pts= model(:,(from:to)); 64 coef1 = polyfit(pts(1,:),pts(2,:),1); 65 k2 = coef1(1); 66 b2 = coef1(2); 67 coef2 = robustfit(pts(1,:),pts(2,:),'welsch'); 68 k2 = coef2(2); 69 b2 = coef2(1); 70 ML = true; 71 catch 72 ML = false; 73 end; 74 [D,fPb]= Dist2D_Point_to_Line(model(:,from),[0 b2]',[1 k2+b2]'); 75 [D,tPb]= Dist2D_Point_to_Line(model(:,to),[0 b2]',[1 k2+b2]'); 76 interval=abs(model(1,from) -model(1,to)); 77 if(interval>0.05) 78 x = linspace(fPb(1) ,tPb(1), 5); 79 if ML 80 y_ML = k2*x +b2; 81 lineSegCoord=[lineSegCoord [fPb(1) fPb(2) tPb(1) tPb(2)]']; 82 plot(x, y_ML, 'b-', 'LineWidth', 1); 83 end; 84 else 85 y = linspace(fPb(2) ,tPb(2), 5); 86 if ML 87 x_ML =(y-b2)/k2; 88 lineSegCoord=[lineSegCoord [fPb(1) fPb(2) tPb(1) tPb(2)]']; 89 plot(x_ML, y, 'b-', 'LineWidth', 1); 90 end; 91 end; 92 % try 93 % tmpPts= model(:,(from:to)); 94 % Theta_ML = estimate_line_ML(tmpPts,[], sigma, 0); 95 % ML = true; 96 % catch 97 % % probably the optimization toolbox is not installed 98 % ML = false; 99 % end; 100 % interval=abs(model(1,from) -model(1,to)); 101 % if(interval>10) 102 % x = linspace(model(1,from) ,model(1,to), 5); 103 % if ML 104 % y_ML = -Theta_ML(1)/Theta_ML(2)*x - Theta_ML(3)/Theta_ML(2); 105 % lineSegCoord=[lineSegCoord [x(1) y_ML(1) x(5) y_ML(5)]']; 106 % plot(x, y_ML, 'b-', 'LineWidth', 1); 107 % end; 108 % else 109 % y = linspace(model(2,from) ,model(2,to), 5); 110 % if ML 111 % x_ML = -Theta_ML(2)/Theta_ML(1)*y - Theta_ML(3)/Theta_ML(1); 112 % lineSegCoord=[lineSegCoord [x_ML(1) y(1) x_ML(5) y(5)]']; 113 % plot(x_ML, y, 'b-', 'LineWidth', 1); 114 % end; 115 % end; 116 end 117 end 118 end
4.Ransac方法
5.霍夫变换方法
6.EM方法