树莓派是最近比较火热的开源硬件,其设备只有信用卡大小,运行着Linux系统,专为学生编程教育而设计。我十多年的技术路线基本以学习微软的技术为主,中间也曾试图学习过linux,但是相对陡峭的学习曲线,只好让我放弃了。最近几年深入研究嵌入式系统,自然绕不过去linux学习这个坎。幸好有了树莓派,一是让人容易滋生学习的兴趣;二是全球范围内网友技术交流,便于问题的定位和解决;所以在学习的过程中,慢慢地解开了linux的神秘面纱,使得有机会一探linux设计架构之美。
以前用.NET Micro Framework系统做过一些智能车控制,但是功能相对简单。这次有了树莓派的加入,增加了Sony PS2遥控器、视频监控和机械手,便变得很有意思了。下图是设备连接的示意图:

从上图来看,功能还是相对比较复杂的,需要9路PWM,其中7路来自凌霄评估板(.NET Micro Framework开发板)3路控制机械手,余下的四路PWM和8个GPIO分别驱动四个马达;另外2路PWM来自树莓派,用来驱动摄像头云台(两自由度,可以水平和垂直旋转);树莓派引出一个GPIO,用来控制LED闪烁,摄像头选取的是配套摄像头;由于Sony PS2接收器和凌霄评估板连接,所以还需要把一些按键信息通过串口发给树莓派,由树莓派驱动摄像头云台。
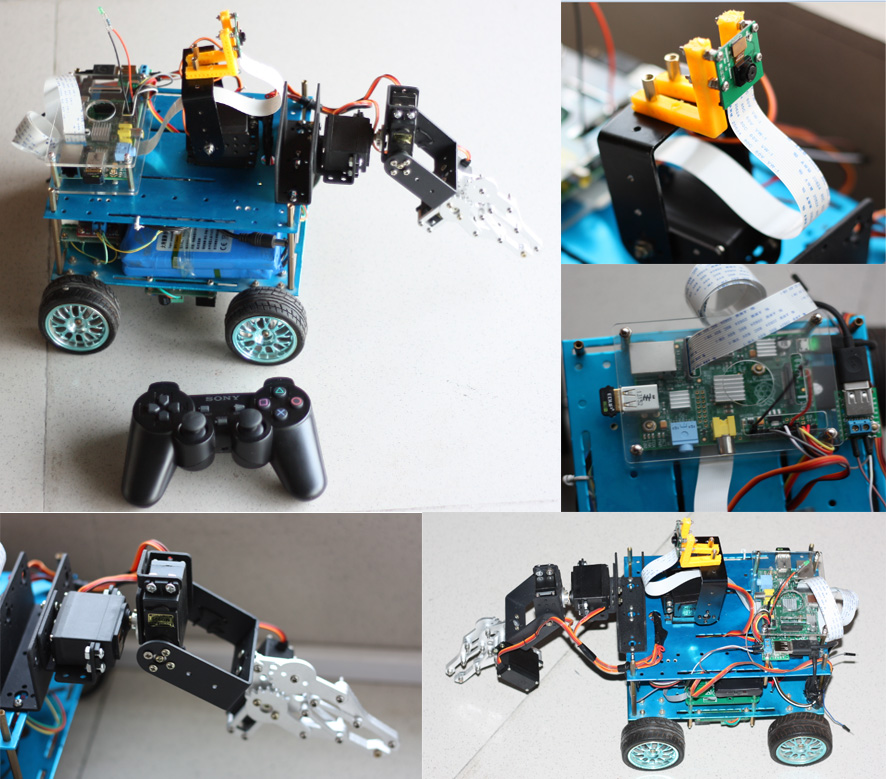
下图是组装好的设备图片:
为了让大家有一个直观的印象,先看一段演示视频:

视频链接:http://v.youku.com/v_show/id_XNjY2MTE1NjQ0.html
由于需要介绍的内容相对较多,所以我们分四篇来讲解视频监控智能车的制作,分别为《遥控篇》:主要讲解Sony PS2遥控器信号接收处理;《控制篇(.NET MF)》:主要讲解用.NET MF如何驱动小车和控制机械手;《控制篇(树莓派)》:主要讲解如何用树莓派驱动GPIO、PWM和串口通信;《视频篇》:主要讲解视频服务的搭建,远程视频观看及自启动程序的配置。
本篇先介绍Sony PS2遥控器信号获取。
A 遥控器说明

Sony PS2游戏机手柄有两个摇杆,14个功能键(不包含模式键),非常适合我们控制复杂的系统,比如控制机械手、摄像头云台、小车行进及速度快慢。
目前网上购买一个这样的游戏手柄大概40元左右的样子,性价比还是非常高的。
B 设备接线
购买游戏手柄的时候已经包含了一个接收头了。有些店家还额外提供两种转接头,一种是SPI接口的,一种是串口的。SPI接口的其实就是进行了一个电平转换(3V3=>5V),没有进行什么特别的处理。串口的转接头是中间加了一个AVR单片,可以主动把采集的按键信息,通过串口(TTL电平)发送出去。使用相对简单,但是功能上有问题,一是程序似乎有bug,在操作PSB_PINK和PSB_BLUE按键的时候,其返值和其它按键不同(PSB_PINK仅抬起发键值,PSB_BLUE按下和抬起都发键值,其它键都是按下发键值)。另外摇杆的键值是必须按下L2或R2时,才发送对应摇杆的X/Y值,此外多个按键如果同时按下,是无法区分的。
所以我们选用SPI接口的(其实我们也可以直接把手柄接收头和我们的凌霄系统进行连接,只是增加转接板便于接线)。

凌霄评估板包含一个USB、一个TF卡槽和一路RS485接口,另外直接引出31个PIN(两个标准.NET Gadgeteer接口和一个子板接口)。提供2路SPI、1路I2C、5个串口、16路PWM、12路AD、2路DA、若干GPIO(Pin脚会有复用)。
四个马达,两个驱动器供分别需要4个GPIO和2路PWM,为了便于连接,我们分别通过.NET Gadgeteer接口提供,所以遥控手柄接收器我们连接在子板接口上。
接线如下:
Mainboard.SubPort.Pin2 (5V) -- 电源(4.vcc,如果是直接连,则连接Pin1 3V3)
Mainboard.SubPort.Pin12(PA5) -- att(6.ATT选取)
Mainboard.SubPort.Pin10(PA7) -- cmd(2.命令)
Mainboard.SubPort.Pin8(PC7) -- dat(1.资料)
Mainboard.SubPort.Pin14(PB3) -- clk(7.时钟)
Mainboard.SubPort.Pin3 (GND) -- 地(GND)
【注】中间的四个GPIO可以任意,只要在程序中指定就可以。
C 用户驱动开发
虽然接口类似SPI,但是实际用SPI接口去通信,设置各种模式(A/B/C/D四种模式),通信都不正常(返回0xFF等系列值)。所以我们采用用户驱动,用C++进行开发。
用户驱动我已经写过几篇文章了,请网友自行参考《.NET Micro Framework之MDK C++二次开发》。
我们直接从Arduino相关驱动进行修改移植,包含两个文件:ps2x_lib.h和ps2x_lib.cpp。
我们需要修改和GPIO操作、时钟操作相关的部分。
在config_gamepad函数中我们添加GPIO初始化相关代码
MF->CPU_GPIO_EnableOutputPin(att,FALSE); MF->CPU_GPIO_EnableOutputPin(cmd,FALSE); MF->CPU_GPIO_EnableInputPin(dat,FALSE,NULL,GPIO_INT_NONE,RESISTOR_PULLUP); MF->CPU_GPIO_EnableOutputPin(clk,FALSE);
原GPIO操作代码:
inline void PS2X::CMD_SET(void) { *_cmd_lport_set |= _cmd_mask; } inline void PS2X::CMD_CLR(void) { *_cmd_lport_clr |= _cmd_mask; } inline void PS2X::ATT_SET(void) { *_att_lport_set |= _att_mask; } inline void PS2X::ATT_CLR(void) { *_att_lport_clr |= _att_mask; } inline bool PS2X::DAT_CHK(void) { return (*_dat_lport & _dat_mask)? true : false; }
改为:
// On pic32, use the set/clr registers to make them atomic... inline void PS2X::CLK_SET(void) { MF->CPU_GPIO_SetPinState(SPI_CLK_Pin,TRUE); } inline void PS2X::CLK_CLR(void) { MF->CPU_GPIO_SetPinState(SPI_CLK_Pin,FALSE); } inline void PS2X::CMD_SET(void) { MF->CPU_GPIO_SetPinState(SPI_MO_Pin,TRUE); } inline void PS2X::CMD_CLR(void) { MF->CPU_GPIO_SetPinState(SPI_MO_Pin,FALSE); } inline void PS2X::ATT_SET(void) { MF->CPU_GPIO_SetPinState(SPI_CS_Pin,TRUE); } inline void PS2X::ATT_CLR(void) { MF->CPU_GPIO_SetPinState(SPI_CS_Pin,FALSE); } inline bool PS2X::DAT_CHK(void) { return MF->CPU_GPIO_GetPinState(SPI_MI_Pin); }
定义几个宏:
#define delayMicroseconds MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled #define millis() (MF->HAL_Time_CurrentTime()/1000) #define delay(x) MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(1000*x)
由于没有map函数,需要我们自己实现:
int map(INT32 x, int in_min, int in_max, int out_min, int out_max) { return(x -in_min)*(out_max -out_min)/(in_max -in_min)+out_min; }
另外就是重定义一些变量类型了,这里就不详述了。
下面说一下用户驱动接口的编程:
我们通过GeneralStream_Open2_UserDriver接口传递一个32位整型数,传入四个GPIO的值。
int GeneralStream_Open2_UserDriver(int config) { //必须第一个执行 InitUserDriver(); //获取系统函数的指针 MF = (IGeneralStream_Function*)config; //配置IO att = (UINT8)(MF->iParam1>>24 & 0xFF); cmd= (UINT8)(MF->iParam1>>16 & 0xFF); dat= (UINT8)(MF->iParam1>>8 & 0xFF); clk = (UINT8)(MF->iParam1>>0 & 0xFF); …… }
这里我们用到一个.NET Micro Framework PAL底层特有的一个功能函数:HAL_COMPLETION。可以定时去执行一个函数,类似一种多线程机制(可以定义多个)。
我们定义一个20ms执行的扫描函数,用来扫描键值:
hcHander = MF->HAL_COMPLETION_Initialize(ScanKey,NULL);
MF->HAL_COMPLETION_EnqueueDelta(hcHander,20000); //20ms执行一次
完整的扫描函数代码如下:
void ScanKey(void *arg) { if(error == 1 || type == 2) { InitPS2(); MF->HAL_COMPLETION_EnqueueDelta(hcHander,1000000); //1s执行一次 if(error == 1 || type == 2)return; } //读状态 ps2x.read_gamepad(false, vibrate); UINT8 button = 0; for(int i=0;i<16;i++) { if(ps2x.NewButtonState(Buttons[i])) { button = ps2x.Button(Buttons[i]); //MF->debug_printf("%s:%d ",ButtonNames[i],button); //MF->lcd_printf("%s:%d ",ButtonNames[i],button); if(button) ButtonState |= 1<<i; else ButtonState &= ~(1<<i); //触发事件 MF->Notice_GenerateEvent(UserDriver_Hander,(byte)i<<16 | button ); } } UINT8 lx=ps2x.Analog(PSS_LX); UINT8 ly=ps2x.Analog(PSS_LY); UINT8 rx=ps2x.Analog(PSS_RX); UINT8 ry=ps2x.Analog(PSS_RY); ButtonAnalog = lx<<24 | ly<<16 | rx<<8 | ry; if(frist!=1) { if(lx!=olx || ly!=oly) { //MF->lcd_printf("lx:%d ly:%d ",lx,ly); //触发事件 MF->Notice_GenerateEvent(UserDriver_Hander,(byte)16<<16 | lx<<8 | ly ); } if(rx!=orx || ry!=ory) { //MF->lcd_printf("rx:%d ry:%d ",rx,ry); //触发事件 MF->Notice_GenerateEvent(UserDriver_Hander,(byte)17<<16 | rx<<8 | ry ); } } olx=lx;oly=ly;orx=rx;ory=ry;frist=0; MF->HAL_COMPLETION_EnqueueDelta(hcHander,20000); //20ms执行一次 }
为了便于同时获取键值和摇杆值,我们还封装了一个接口,代码如下:
int GeneralStream_IOControl2_UserDriver(int code,int parameter) { //获取当前按键状态 if(code == 0) return ButtonState; else if(code == 1) return ButtonAnalog; return -1; }
以上代码编译成bin文件,通过YFAccessFlash直接部署到设备中即可。
下面我们介绍一下,用户C#代码
我们先做一个简单的封装:
public PS2(Cpu.Pin clk,Cpu.Pin cmd,Cpu.Pin att,Cpu.Pin dat ) { gs = new GeneralStream(); if (gs.Open("UserDriver", (int)((int)clk << 24 | (int)cmd << 16 | (int)att << 8 | (int)dat)) <= 0) { throw new Exception("Open UserDriver failed!"); } gs.Notice += new GeneralStreamEventHandler(gs_Notice); } void gs_Notice(uint hander, uint data, DateTime timestamp) { //Debug.Print(hander.ToString() + " - " + data.ToString()); if (hander == 1) { Key key = (Key)(data >> 16 & 0xFF); int state = 0,x=0,y=0; if (key == Key.LRocker || key == Key.RRocker) { x = (int)(data >> 8 & 0xFF); y = (int)(data & 0xFF); } else { state = (int)(data & 0xFF); } if (Click != null) Click(this, new ButtonArgs(key, state, x, y)); } } public class Program { public static void Main() { PS2 ps2 = new PS2(Mainboard.SubPort.Pin12, Mainboard.SubPort.Pin10, Mainboard.SubPort.Pin8, Mainboard.SubPort.Pin14 ); ps2.Click += new PS2.ClickHandle(ps2_Click); Thread.Sleep(Timeout.Infinite); } static void ps2_Click(object sender, PS2.ButtonArgs e) { Debug.Print(e.ToString()); } }
D用户应用程序功能测试
接上设备,把以上的程序运行,操作游戏机手柄,我们就可以看到按键信息了。

文章导航:
2、【树莓派+.NET MF打造视频监控智能车】控制篇(.NET MF)
3、【树莓派+.NET MF打造视频监控智能车】控制篇(树莓派)
4、【树莓派+.NET MF打造视频监控智能车】视频篇
小结:
1、 有了用户驱动C/C++二次开发接口,很容易移植相关C/C++代码。
2、 .NET Micro Framework的封装性能,让用户程序仅关注业务逻辑即可,显得非常的简单易用。
3、 VS2010/VS2012可以在线调试.NET Micro Framework(加断点、单步执行等等),便于问题诊断和调试。