
通过上一篇专题文章的介绍,相信大家已经对转盘式共聚焦显微镜的基本原理和技术特点有所了解。在本期中,我们就来为大家介绍一些不同的转盘共聚焦系统。
常见转盘共聚焦系统
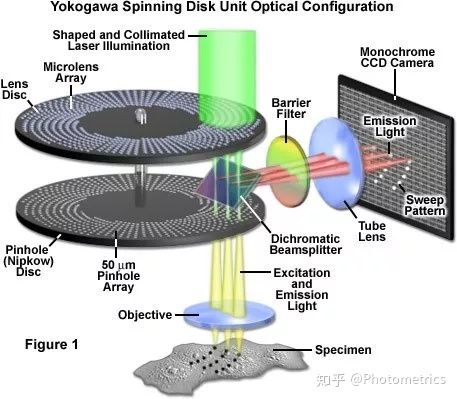
目前市场上最常见的是由日本Yokogawa(横河电机)公司生产的 CSU系列转盘系统,主流转盘共聚焦显微镜多使用的是这一系列。正如在前文中提到的,它由两个同轴排列的针孔圆盘组成,中间装有一个二向色镜。上方圆盘的针孔中装有菲涅尔微透镜 (Microlens disk),将光线聚焦通过下方针孔盘(pinhole disk)相对应的针孔,这些针孔位于微透镜的焦平面上(图1),这样经过微透镜聚焦的光再照射在样品上。同理来自样品的发射光经物镜再聚焦到针孔盘上,再由分色镜反射,经发射滤光片聚焦到相机上。因此来自一个针孔的照明光产生由同一个针孔收集的发射光。微透镜盘的使用能够显著增加透光量,提高图像信噪比;同时进一步减小了激光功率,降低光漂白,延长成像时间。
尼康转盘共聚焦显微系统使用的正是Yokogawa CSU系列,包括CSU-X1和CSU-W1(图2)。CSU-X1扫描速度高达10000转/分钟,理论上最大采集速度为2000帧/秒。CSU-W1的扫描速度较慢,最大采集速度为200帧/秒,但视场几乎比CSU-X1大4倍,可以使用更大视野的相机;还具有串扰低和近红外光谱范围更大的特点,能够对活细胞内部更深层区域进行清晰成像;并支持双相机,可以进行快速双色定位成像。CSU-W1有50μm和25μm两种尺寸的针孔,用于匹配不同倍数的物镜。25μm针孔可以搭配低倍物镜,视野更大,对比度更好。
在CSU-W1基础上推出的CSU-W1 SoRa模式使用60x和100x的高倍物镜,通过光学放大,微透镜技术和反卷积将横向分辨率进一步提升至120nm,实现转盘式共聚焦和超分辨显微成像的结合。

奥林巴斯 IXplore SpinSR10 转盘共聚焦超分辨率成像系统(图3)使用的也是CSU-W1,并通过光学变倍达到缩小针孔的效果,提高系统分辨率。再结合奥林巴斯超分辨率(OSR)技术,可将分辨率进一步提升到120 nm。该系统可以对细胞内深达100微米的区域进行成像操作。光毒性低,稳定性好,可以迅速创建3D超分辨率图像数据,观察到活细胞内部的动态变化。

图3 奥林巴斯 IXplore SpinSR10 转盘共聚焦超分辨率成像系统
其他转盘共聚焦系统
微透镜固然好,不过一般价格也相对较高,微透镜的直径还会限制单位面积内的针孔数量,与不同显微镜制造商提供的物镜的数值孔径也不一定能够匹配。下面我们就介绍一些其他的转盘共聚焦系统,供大家参考~
意大利CrestOptics 公司的X-Light系列转盘系统(图4)采用单转盘设计,可以使用更为经济的LED光源,具有寿命长,能耗低,产热少的优点,对活细胞更加友好。该系统对针孔直径,阿基米德螺旋数和螺旋模式都进行了优化,提高了抑制杂散光的能力,可以在一定程度上实现更高的光通量,提高系统的分辨率和信噪比。转盘采用50μm针孔,并设计了Standard 和 Larger两种针孔间距,较大的间距能够降低串扰,适合厚样本切片。X-Light V3最大能够支持25mm对角线视野,方便大样本成像。

图4 两种针孔间距的 CrestOptics X-Light V3 转盘系统
另外还有一种非激光的共聚焦系统,来自Aurox公司的Aurox Clarity Laser Free Confocal(Aurox LFC,图6),将转盘和结构光照明相结合。激发光会通过一个反射罩(reflective mask)照射到样品上,反射罩上有一些由不同比率和空间频率的线组成的图案,以适应不同物镜。焦平面发射光主要来自受反射罩图案激发的区域,因此会通过反射罩,而来自其他非焦平面的发射光将被反射(图7)。因此我们会获得两张图像:一张通过转盘成像(WF+Confocal),带有结构图案;另一张通过转盘反射成像(WF- Confocal)。将两张图像相减,就能去除非焦平面的干扰信号。该系统具有宽场和共聚焦两种模式,光学切片能力与传统的点扫描式共聚焦相当。

图6 Aurox Clarity Laser Free Confocal
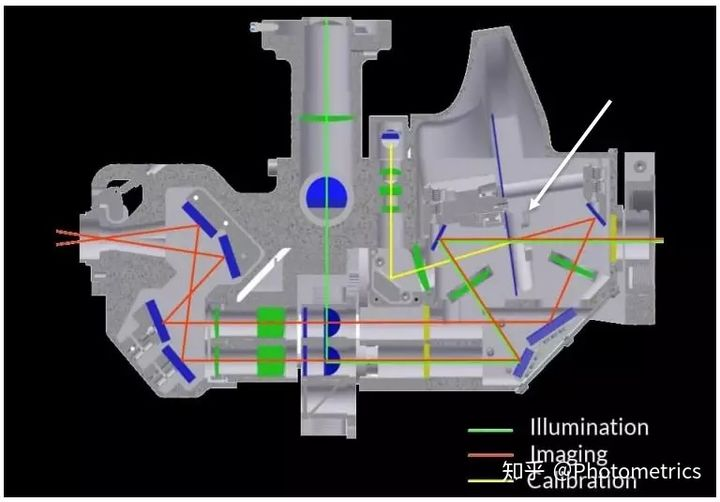
图7 Aurox LFC 光路示意。如白色箭头指示反射罩反射非焦平面的发射光,而来自焦平面的发射光可以直接通过反射罩
这种系统需要两个单独的相机成像,或在单个相机上同时成像,后者更容易进行校准和图像处理。因此,大视野的sCMOS相机更加适合。另外,由于两幅图在信号强度上差异很大,也需要大动态范围的sCMOS相机。
转盘共聚焦的相机选择
说了这么多,到底如何选择最适合转盘式共聚焦显微镜的相机呢?其实我们不难从转盘系统的原理看出:由于透光率不高,相机灵敏度是首要考虑的参数。此外,高速和大视野的相机能够帮助转盘共聚焦系统达到最佳性能。这样一来,背照式sCMOS相机就是它的最佳选择啦!
为什么背照式 sCMOS 比 EMCCD 更加适合转盘?
- 首先,QE高达95%的背照式sCMOS具有与EMCCD相当的灵敏度。但是,EMCCD不但需要定期进行增益校准,同时由于电子倍增引入的额外噪声因素会降低总体信噪比,而像Prime 95B这样的sCMOS相机则不会遇到这些问题。
- 其次,背照式sCMOS在分辨率,速度,视野,动态范围等参数上都要优于EMCCD。常见的背照式sCMOS有6.5μm和11μm两种不同的像元尺寸,可以分别与60x和100x的物镜相匹配,达到最佳分辨率。而EMCCD像元较大,对样品细节的分辨能力较差。
我们可以看到,与EMCCD相比,Prime 95B的图像信噪比更高,并且可以对EMCCD看不到的样品细节进行更清晰的成像(图8)。
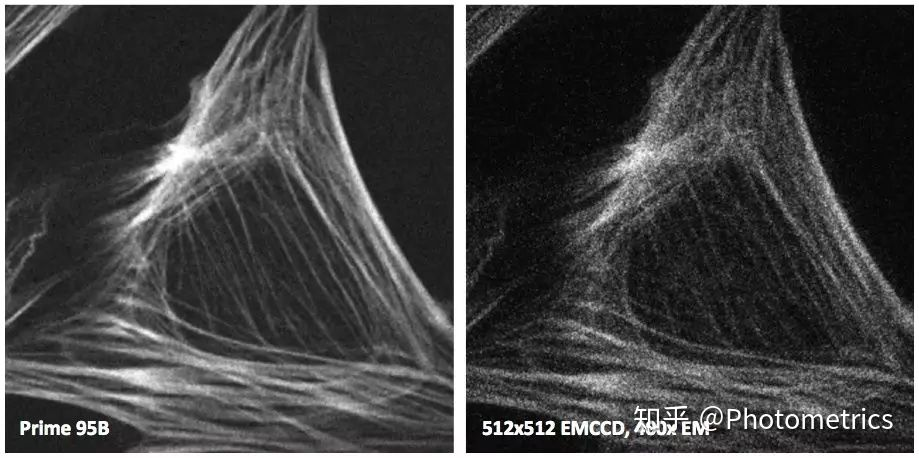
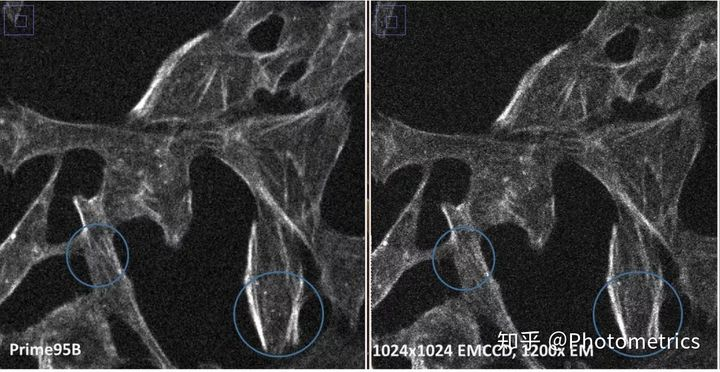
图8 转盘共聚焦显微镜下Prime 95B 和EMCCD成像效果对比。上:Prime 95B vs 512x512 EMCCD;下:Prime 95B vs 1024x1024 EMCCD。
最后让我们来欣赏一下 Prime 95B 在转盘式共聚焦显微镜下拍摄的图像吧~
果蝇胚胎(Yokogawa spinning disk,60x,from Dr. Kevin O’Conner,NIH)
mCherry-EB3 标记的细胞(Yokogawa CSU-X1,100ms曝光,from Wittman Lab,University of California, San Francisco)
线粒体 (Green, 488nm) 和肌动蛋白丝 (Red, 566nm)(Yokogawa CSU-X1,63x,from Peter March, Bioimaging Facility,University of Manchester)