1、矩阵加
1) 使用重载的 “+” 运算符
矩阵的加法是指两个矩阵对于位置的数值相加,使用OpenCv重载的 “+” 运算符,假设两个矩阵都为uchar类型,例如:
1 Mat src1 = (Mat_<uchar>(2,3) << 23, 123, 90, 100, 250, 0);
2 Mat src2 = (Mat_<uchar>(2,3) << 125, 150, 60, 100, 10, 40);
3 Mat dst = src1 + src2;
123+150应该等于273, 因为两个矩阵的类型都是uchar, 所以"+“运算计算出来的和也是uchar类型, 但是uchar类型范围的最大值是255, 所以273限制为了255。
利用”+“运算符计算计算Mat的和需注意:两个Mat的数据类型必须是一样的, 否则会报错。
一个数值与一个Mat对象相加, 也可以使用”+"运算符, 但是无论这个数值是什么数据类型, 返回的Mat的数据类型都与输入的Mat相同,且结果是矩阵中的每个元素都与这个数值相加:
例如:
1 float value = 100.0;
2 Mat dst1 = src1 + value;
2) 使用add函数
1 void add
2 (
3 InputArray src1,
4 InputArray src2,
5 OutputArray dst,
6 InputArray mask = noArray(),
7 int dtype = -1
8 );
例如:
1 Mat src1 = (Mat_<uchar>(2,3) << 23, 123, 90, 100, 250, 0);
2 Mat src2 = (Mat_<uchar>(2,3) << 125, 150, 60, 100, 10, 40);
3 Mat dst;
4 add(src1, src2, dst, Mat(), CV_64FC1);
使用add函数时, 输入矩阵的数据类型可以不同, 二输出矩阵的数据类型可以根据情况自行指定, 只有当src1和src2的数据类型相同时, 才能令dtype = -1, 否则仍然会报错。
3) 两个向量之间也可以做加法运算
1 Vec3f v1 = Vec3f(1, 2, 3);
2 Vec3f v2 = Vec3f(10, 1, 12);
3 Vec3f v = v1 + v2;
4)线性相加scaleAdd
1 C++: void scaleAdd
2 (
3 InputArray src1, // 第一个输入矩阵
4 double alpha, // 第一个输入矩阵的比例因子
5 InputArray src2, // 与src1大小和类型相同的第二个输入矩阵。
6 OutputArray dst
7 )
它计算一个缩放数组和另一个数组的和:
dst(I) = alpha * src(I) + src2(I)
例如:
scaleAdd(imageA,k,imageB,resultC);
该函数也可以用矩阵表达式模拟,例如:
1 Mat A(3, 3, CV_64F);
2 ...
3 A.row(0) = A.row(1)*2 + A.row(2);
5)两个数组的加权和addWeighted
1 C++: void addWeighted
2 (
3 InputArray src1, // 第一个图像矩阵
4 double alpha, // 第一个数组元素的权重。
5 InputArray src2, // 与src1大小和通道相同的第二个输入图像矩阵。
6 double beta, // 第二个数组元素的权值。
7 double gamma, // 与输入数组具有相同大小和通道数的输出数组。
8 OutputArray dst, // 每个和加上一个标量。
9 int dtype=-1 // 可选输出阵列深度;当两个输入数组具有相同的
10 // 深度时,可以将dtype设置为-1,这将等效于src1.depth()。
11 )
该函数可替换为矩阵表达式:
dst = src1 * alpha + src2 * beta + gamma;
例如:
1 Mat img1=imread("./a1.jpg");
2 Mat img2=imread("./a2.jpg");
3 Mat dst;
4 addWeighted(img1,0.5,img2,0.3,0,dst);
2、矩阵减
1)使用重载“-”运算符
我们可以使用和**"-"**符号进行 矩阵减运算。
例如:
1 Mat a= Mat::eye(Size(3,2), CV_32F);
2 Mat b= Mat::ones(Size(3,2), CV_32F);
3 Mat d= a-b;

注:如果图像是uchar类型的,144-240不会是 - 96,而是uchar能表示的最小值0
2)减法函数subtract
计算两个数组或数组与标量之间的每个元素的差。
1 C++: void subtract
2 (
3 InputArray src1, // 第一个输入数组或标量。
4 InputArray src2, // 第二个输入数组或标量。
5 OutputArray dst, // 与输入阵列相同大小、相同通道数的输出阵列。
6 InputArray mask=noArray(), // 可选操作面具;这是一个8位的单通道数组,
7 // 指定要更改的输出数组的元素。
8 int dtype=-1 // 输出数组的可选深度
9 )
例如:
1 imshow("img1",img1);
2 imshow("img2",img2);
3 subtract(img1,img2,dst); // saturate(img1 - img2)
4 //注意:要求被处理图片尺寸一致
注:图像元素类型是uchar,如果相减小于0,结果值会变成0,如果大于255,变成255。
3) 元素的绝对差absdiff
计算两个数组或数组与标量之间的每个元素的绝对差。
1 C++: void absdiff
2 (
3 InputArray src1, // 第一个输入数组或标量。
4 InputArray src2, // 第二个输入数组或标量。
5 OutputArray dst // 与输入数组具有相同大小和类型的输出数组。
6 )
dst = saturate(|src1 - src2|)
例如:
1 imshow("img1",src1);
2 imshow("img1",src2);
3 Mat dst;
4 absdiff(src1, src2, dst);//若dst<0,则dst=|dst|>=0
3、矩阵乘
1) 矩阵乘A*B
是以数学运算中矩阵相乘的方式实现的,即Mat矩阵A和B被当做纯粹的矩阵做乘法运算,这就要求A的列数等于B的行数时,才能定义两个矩阵相乘。如A是m×n矩阵,B是n×p矩阵,它们的乘积AB是一个m×p矩阵。
例如:
1 Mat A=Mat::ones(2,3,CV_32FC1);
2 Mat B=Mat::ones(3,2,CV_32FC1);
3 ...
4 AB=A*B;
2) 点乘A.dot(B)(与MATLAB的概念有点区别)
参与点乘的两个Mat矩阵的数据类型(type)只能是 CV_32F、 CV_64FC1、 CV_32FC2、 CV_64FC2 这4种类型中的一种。若选用其他类型,比如CV_8UC1,编译器会报错。
说明: 对于向量a和向量b:
a和b的点积公式为:

A.dot(B)操作相当于数学向量运算中的点乘,也叫向量的内积、数量积。 对两个向量执行点乘运算,就是对这两个向量对应位一一相乘之后求和的操作,点乘的结果是一个标量。 Mat矩阵的dot方法扩展了一维向量的点乘操作,把整个Mat矩阵扩展成一个行(列)向量,之后执行向量的点乘运算,仍然要求参与dot运算的两个Mat矩阵的行列数完全一致。
dot方法声明中显示返回值是double,所以A.dot(B)结果是一个double类型数据,不是Mat矩阵,不能把A.dot(B)结果赋值给Mat矩阵!
例如:
1 Mat A=Mat::ones(2,3,CV_8UC1);
2 Mat B=Mat::ones(2,3,CV_8UC1);
3 double AB;
4 ...
5 AB = A.dot(B);
dot操作不对参与运算的矩阵A、B的数据类型做要求,CV_8UC1、CV_32FC1等,可以是任何Opencv定义的类型,如在2中使用的就是CV_8UC1。
若参与dot运算的两个Mat矩阵是多通道的,则计算结果是所有通道单独计算各自.dot之后,再累计的和,结果仍是一个double类型数据。
3) 计算两个Mat矩阵对应位的乘积A.mul(B)
要求参与运算的矩阵A的行列和B的行列数一致。计算结果是跟A或B行列数一致的一个Mat矩阵。
mul说明:
1、mul操作不对参与运算的两个矩阵A、B有数据类型上的要求,但要求A,B类型一致,不然报错;
2、Mat AB=A.mul(B),若声明AB时没有定义AB的数据类型,则默认AB的数据类型跟A和B保存一致;
3、若AB精度不够,可能产生溢出,溢出的值被置为当前精度下的最大值;
例如:
1 Mat A=Mat::ones(2,3,CV_8UC1);
2 Mat B=Mat::ones(2,3,CV_8UC1);
3 ...
4 Mat AB=A.mul(B);
4) 矩阵与标量相乘
使用“*”示矩阵与标量相乘;
例如:
1 Mat m1 = Mat::eye(2,3,CV_32FC1);
2 ...
3 Mat m2 = m1*2;
4、矩阵除
1)使用重载的 “/” 运算符
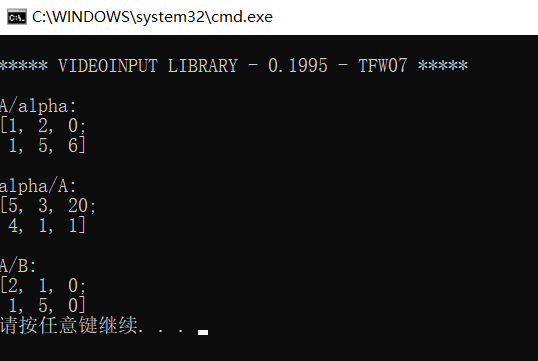
A/B; alpha/A; A/alpha都是点除
例如:
1 Mat src1 = (Mat_<int>(2, 3) << 4, 7, 1, 5, 20, 24); //2行3列的矩阵
2 Mat src2 = (Mat_<int>(2, 3) << 2, 7, 5, 5, 4, 48); //2行3列的矩阵
3 Mat dst1, dst2, dst3;
4 dst1 = src1 / 4;
5 dst2 = 20 / src1;
6 dst3 = src1 / src2;
7 cout << "A/alpha:
" << dst1 << endl << endl;
8 cout << "alpha/A:
" << dst2 << endl << endl;
9 cout << "A/B:
" << dst3 << endl;
输出结果:
2)矩阵除函数 divide
对一个数组执行两个数组或一个标量的每个元素的除法。
1 C++: void divide
2 (
3 InputArray src1, // 第一个输入矩阵
4 InputArray src2, // 与src1大小和类型相同的第二个输入矩阵。
5 OutputArray dst, // 与src2大小和类型相同的输出矩阵。
6 double scale=1, // 标量的因子
7 int dtype=-1
8 )
函数将一个数组除以另一个数组:
dst = saturate(src1*scale/src2)
如果没有src1时:
dst = saturate(scale/src2);
例如:
1 Mat img0 = cv::imread("img_0.jpg", -1);
2 Mat img1 = cv::imread("img_1.jpg", -1);
3 Mat img2;
4 divide(img0, img1, img2, 50, -1);
5、矩阵的转置
由Mat类t()函数实现矩阵的转置
例如:
1 Mat m1 = Mat::eye(4,6,CV_32FC1);
2 ...
3 Mat m1t = m1.t();
6、矩阵的逆
其中inv(A)表示矩阵A的逆矩阵
例如:
1 Mat m1 = Mat::eye(5,5,CV_32FC1);
2 ...
3 Mat m1inv = m1.inv();
7、矩阵中非零元素个数
使用 countNonZero() 函数实现物体的像素或面积常需要用到计算矩阵中的非零元素个数
例如:
1 Mat m1 = Mat::eye(6,6,CV_32FC1);
2 ...
3 int m1num = countNonZero(m1);
8、矩阵中均值和标准差
OpenCV提供了矩阵均值和标准差计算功能,使用 meanStdDev(src,mean,stddev) 函数实现
例如:
1 Mat m1 = Mat::eye(5,5,CV_32FC1);
2 Mat mean,stddev;
3 ...
4 meanStdDev(m1,mean,stddev);
5 .
6 .
7 .
8 Mat m3(Size(5,5),CV_8UC3,Scalar(255,200,100));
9 Mat mean3,stddev3;
10 ...
11 meanStdDev(m3,mean3,stddev3);
注:当src为多通道或多维矩阵时,则函数分别计算不同通道的均值与标准差,因此返回的mean和stddev为对应维度的向量;