卡尺寸工具的应用范围
理想用于计量应用:
-
测量元件的宽度
-
测量元件之间的距离
常见的用处是测量边缘对子,和测量某个边线的点(当测量两个边线的点后,就可以测量点到点的距离)
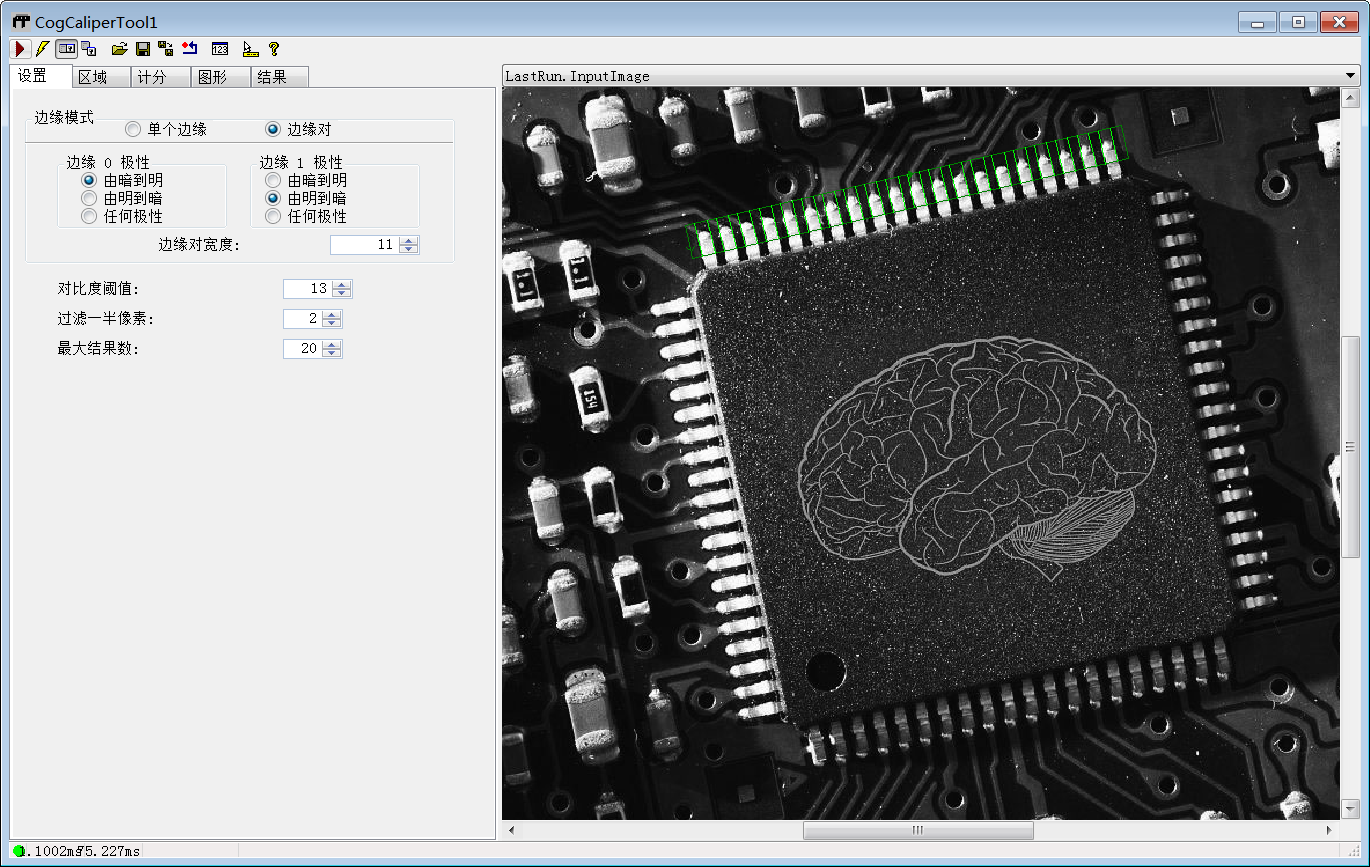
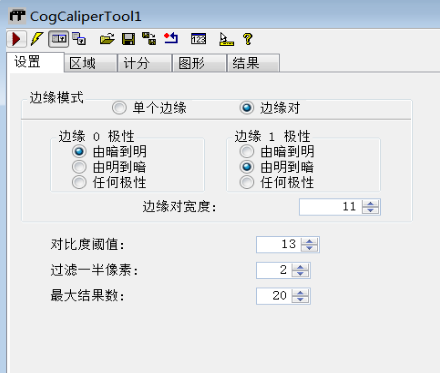
勇哥试了一下测量边缘对子,如下图。
其参数中: 最大结果数要和边缘对子的数量一样,这个例子我测量的是每个ic的引脚宽度。
边缘对宽度要设置适当,对比度阈值要设置适当,边缘0边缘1的极性也要设置适当。
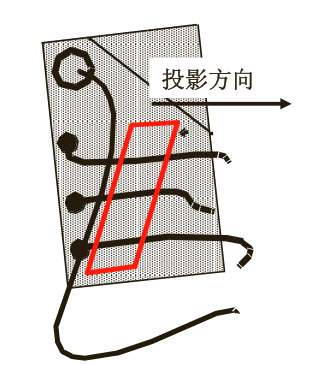
卡尺选择框的操作说明
卡尺寸工具的选择框的示意图:
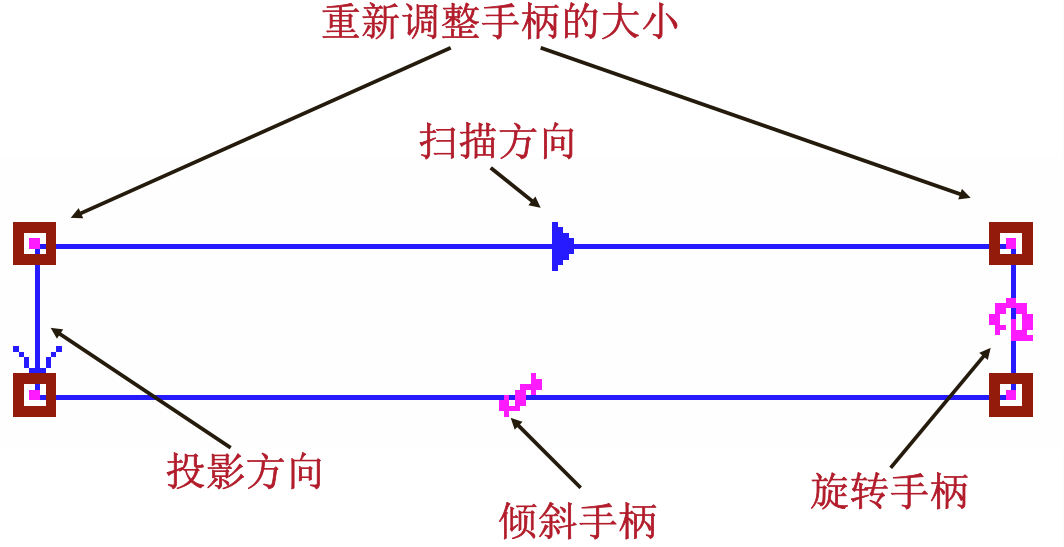
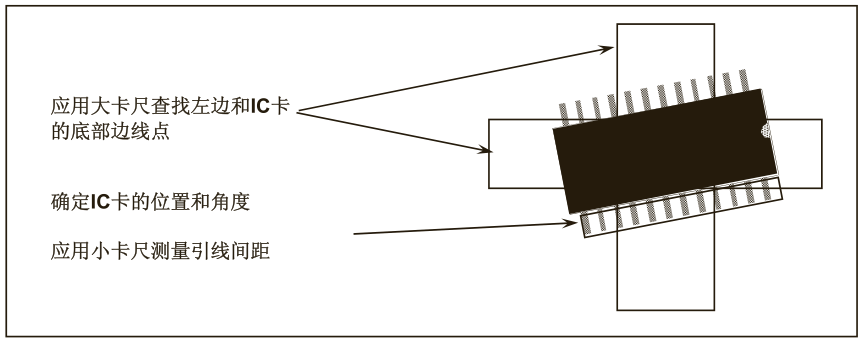
操作选择框时,要把投影方向对着测量边的投影方向。
也就是说,你可能需要旋转操作框。
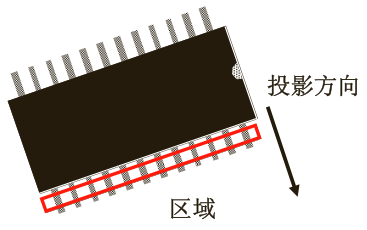
这张图中,则必须倾斜选择框才能保证投影方向。
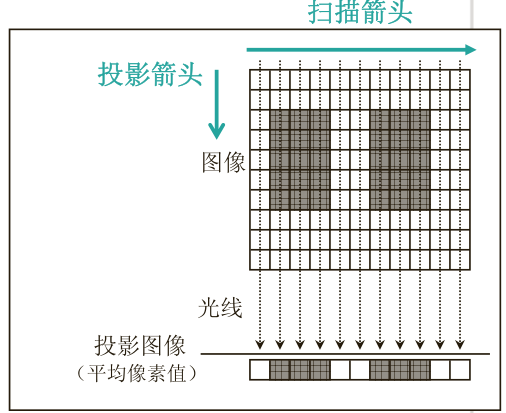
什么是投影
投影可以将二维图像减少到一维图像,它的作用是:
-
减少处理时间和存储
-
–维持并且在一些情况下增强边线信息
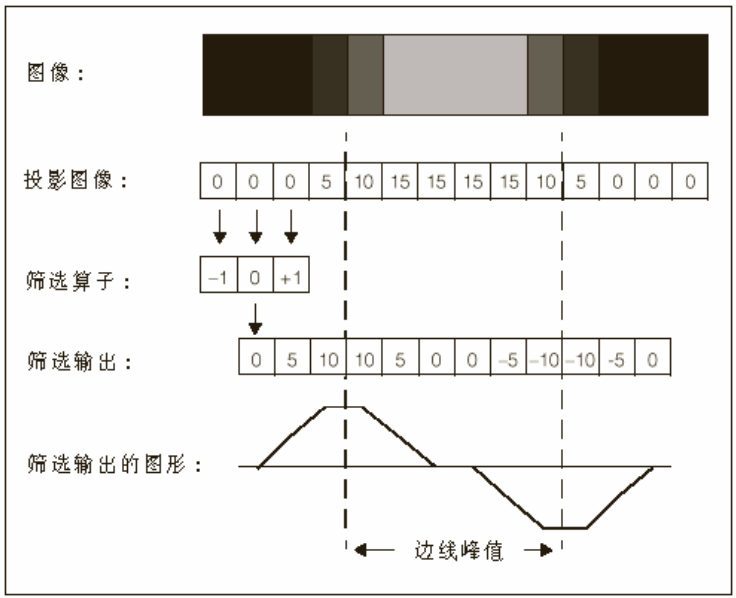
沿着规定方向中的平行光线添加像素灰度值
如下图所示:
沿着规定方向中的平行光线添加像素灰度值,形成一维投影图像。
边线筛选
边线筛选的目的是从输入图像中消除噪音。
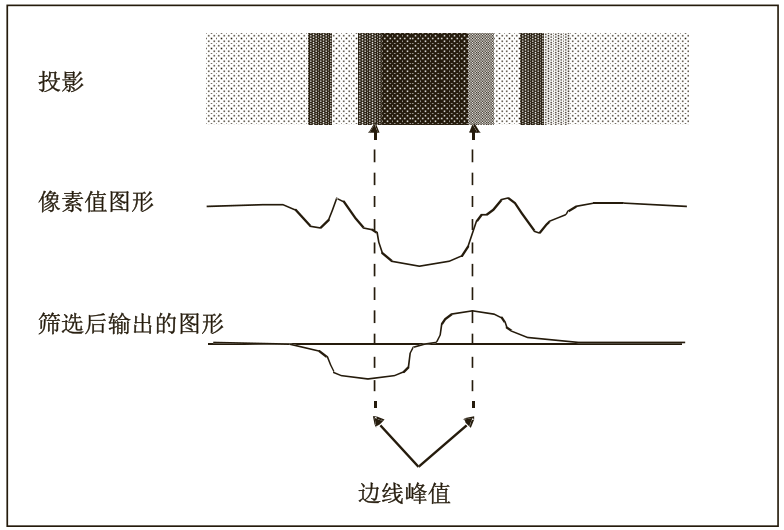
游标卡尺工具通过使用一个筛选算子盘旋一维投影图像来执行筛选。
看下图的原理,貌似有点像opencv算子中的卷积操作。
边线筛选
• 筛选尺寸接近边线尺寸生产较强的边线峰值
• 筛选尺寸太大或者太小会减少峰值
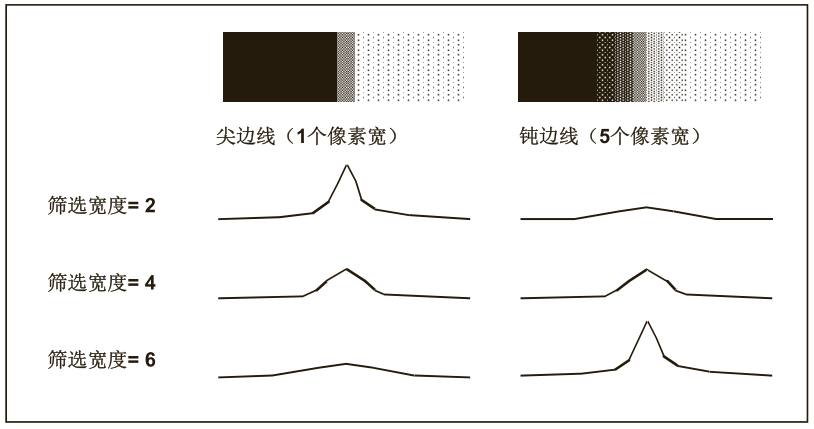
但是这一部分边线筛选的知识对应这个卡尺工具的哪些参数呢? 是“过滤一半像素”,详细见下面说明。
卡尺工具的参数解释
过滤一半像素:
官方文档上居然是这样说的,如下图,像机器翻译出来的一样,谁能看明白它说的是什么我叫你师傅。
2020/3/4 勇哥注:
后来网上翻了一下资料,过滤一半像素主要用于边缘筛选,其目的主要为了消除噪声和增强峰值。
也就是说上面边线筛选的知识讲的就是“过滤一半像素”这个选项的作用。
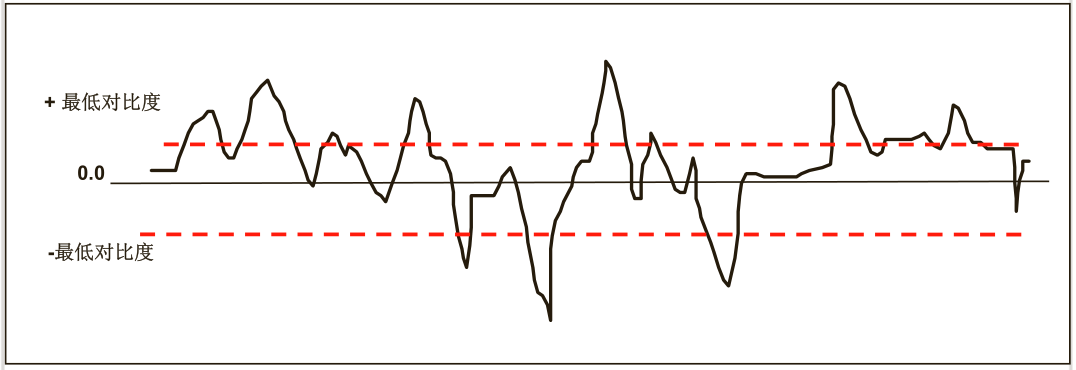
对比度阈值:
对比阀值 消除不满足最低对比度的边线(峰值高度或者深度)
即小于对比度阈值的边会被忽略,大于对比度阈值的边会被保留。
最大结果数: 返回的边线或者边线对子的最大数量。
边缘极性: 没啥好说的
边缘对宽度: 用于边缘对,规定边线之间的预期距离
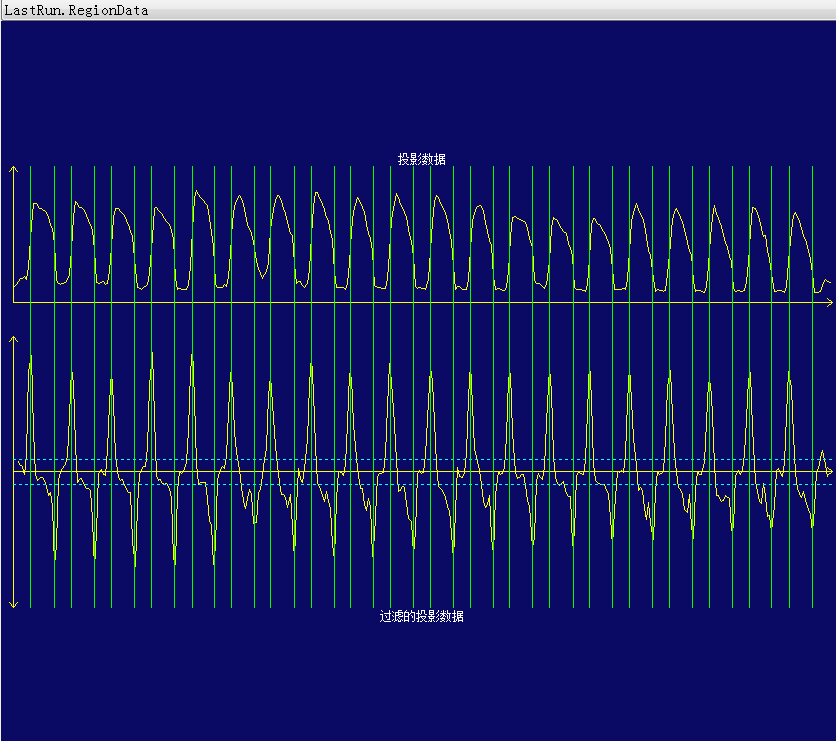
投影曲线
勇哥觉得参考这个图形可以有助于判断下面几个方面:
-
检验卡尺选择框旋转或者斜切的位置是否合……
-
边缘过滤参数是否设置合理。
计分
这个鬼东西还没搞明白,直接把官方文档引用一下备查。
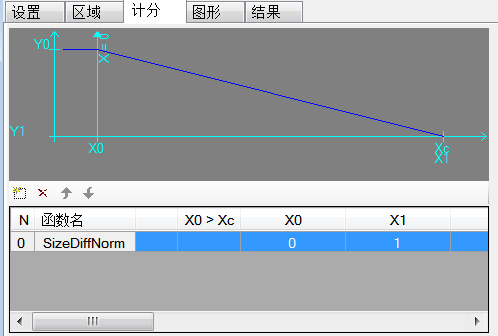
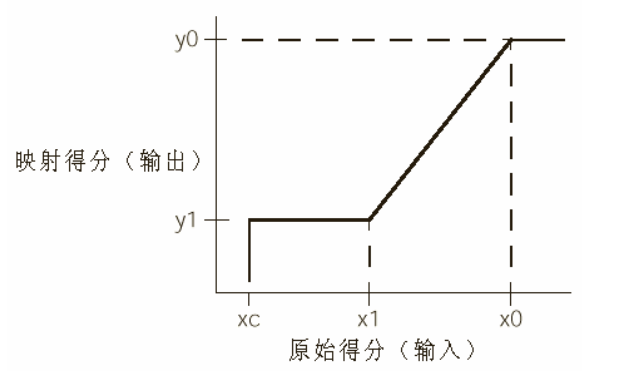
计分:
• 规定应用到该边线探测的计分方法
• 目标是给最满足预期边线的边线对象打可能的最高分
• X c 和X 1 之间的得分被映射到Y 1 上
• X c 和X 1 之间的得分被线性地映射Y 1 和 Y 0 之间
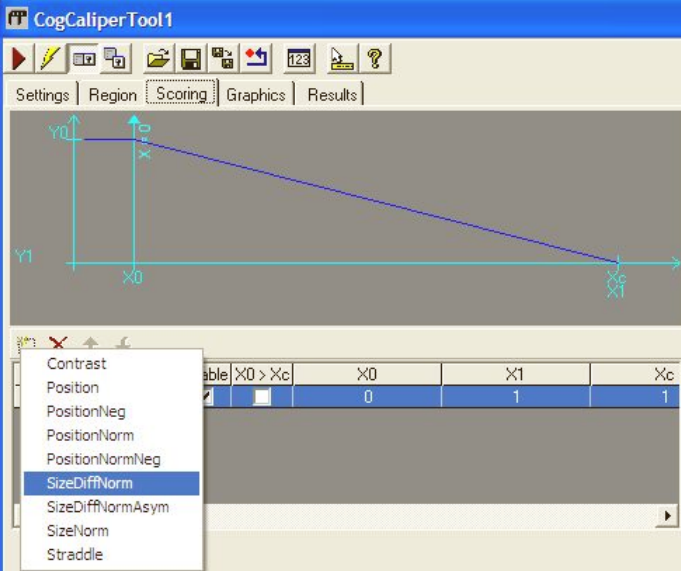
计分方法
• 对比度 – 以像素值的变化来表示
- 对于边线对子,对比度是两个边线的平均对比
• 跨度 - 边线是否跨过投影窗口的中心
– 如果是,得分 = 1
– 如果不是,得分 = 0
尺寸 – 根据边线之间的宽度与边线模型的不同程度
• w = 边线模型的宽度
• d = 边线对子的宽度
• 0 - Size_Diff_Norm |w - d|/w
• 1 - Size_Norm d/w
• 2 - Size_Diff_Norm_Asym (w - d)/w
• 位置 - 边缘与投影窗口的中心之间的距离
• a = 边缘的原点与边缘窗口中心之间的距离
• 0 - Pos | a |
• 1 - Pos_Norm | a | / w
• 2 - Pos_Neg a
• 3 - Pos_Norm_Neg a / w
对于每个限制计算的原始得分通过所定义的计分函数转换为0.0到1.0 范围间的一个 最后得分
• 每个边线或者边线对子的所有得分进行 几何平均 得到一个最后得分
• 只报告有最高得分的边线或者边线对子,直至达到所要求的边线或者边线对子的数量
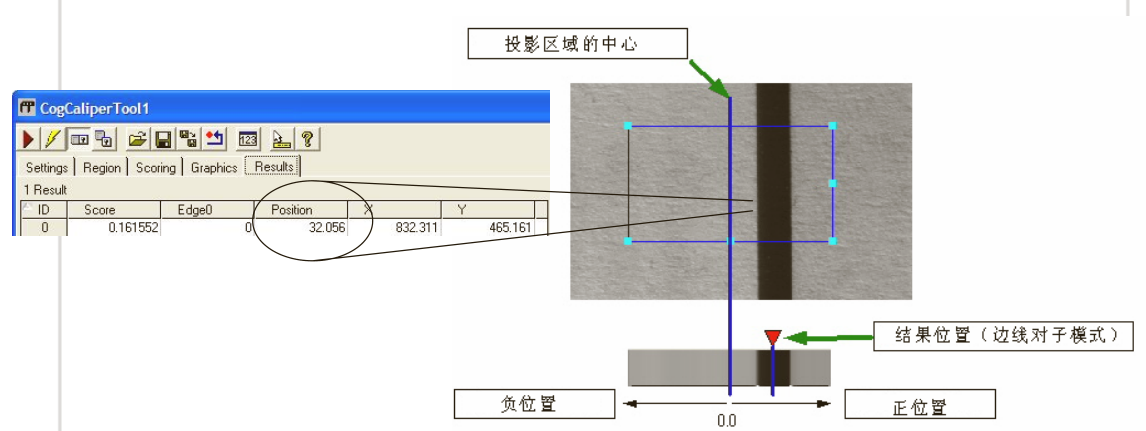
结果数据
下面是上面那个集成电路边缘对例子的结果。
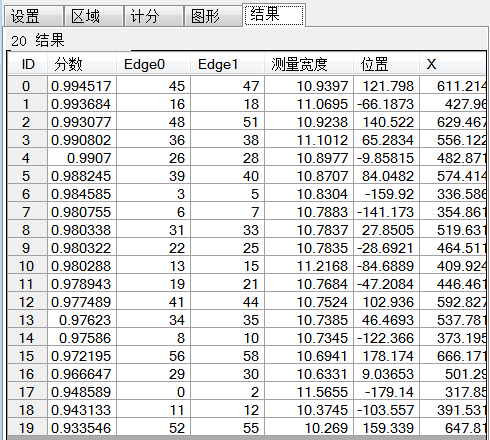
结果按照得分从高到低的顺序显示在结果表格中。
另外那个“位置”是什么鬼?
它是沿相对于输入区域中心的搜索方向的一维测量