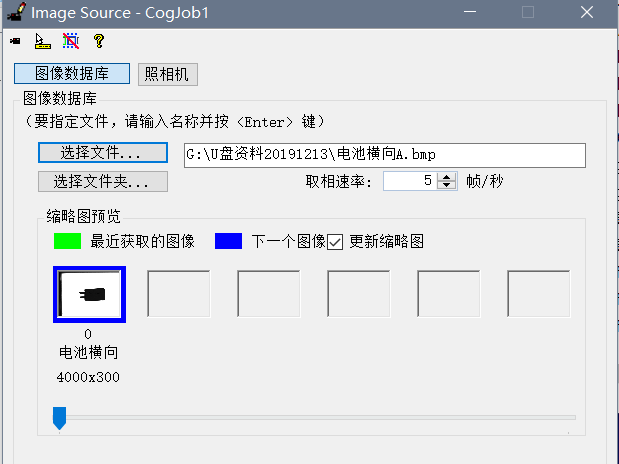
选择图片。
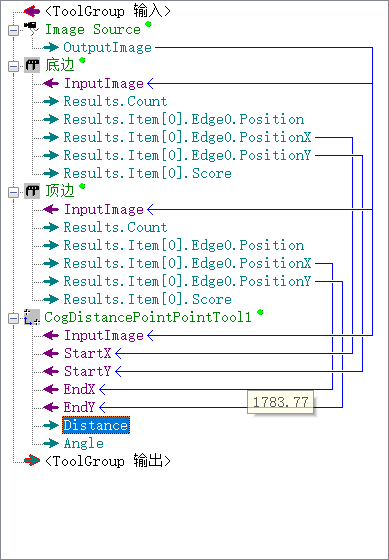
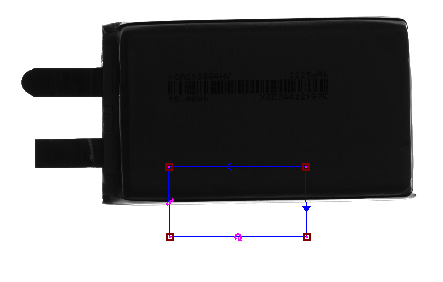
用两个卡尺寸,分别取底边与顶边。
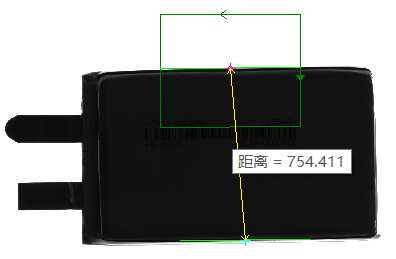
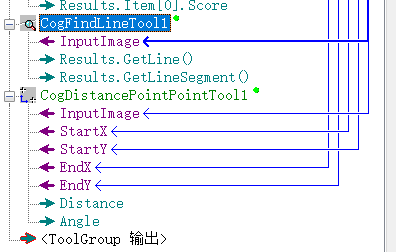
然后用点到点的距离工具取距离,求出来没有标定之前是像素。
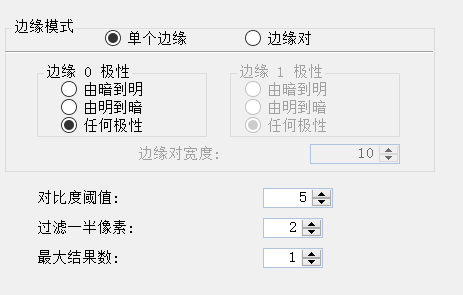
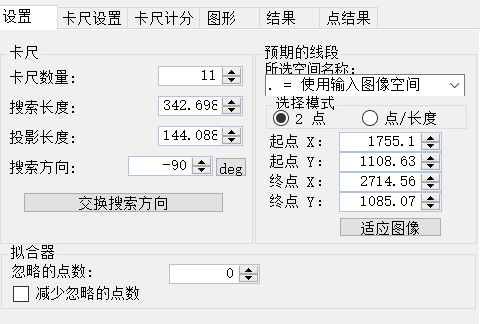
卡尺寸的参数。
卡尺的选择框,实心的箭头代表搜索方向。
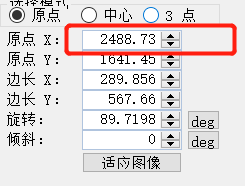
由于程序中使用顶边与底边的起始点计算距离,因此要把起始点位置设置为一样,非则结果不对。
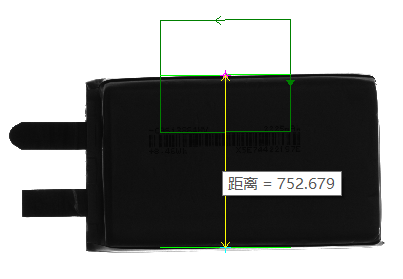
修改一下,让两者的x值一样。
这样改好后,结果是752.679,和上面的错误结果是不同的。
都说visionPro的卡尺很牛,勇哥暂时没感觉它牛在哪里?
首先,参数极少,也就是个边缘极性和阈值。
再一个,似乎没有生成拟合线的点。
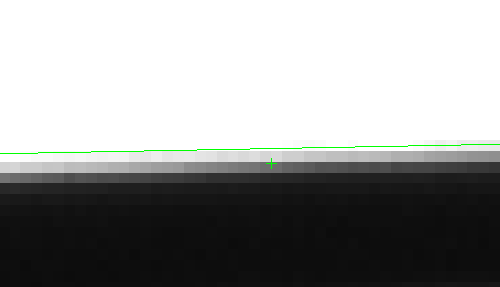
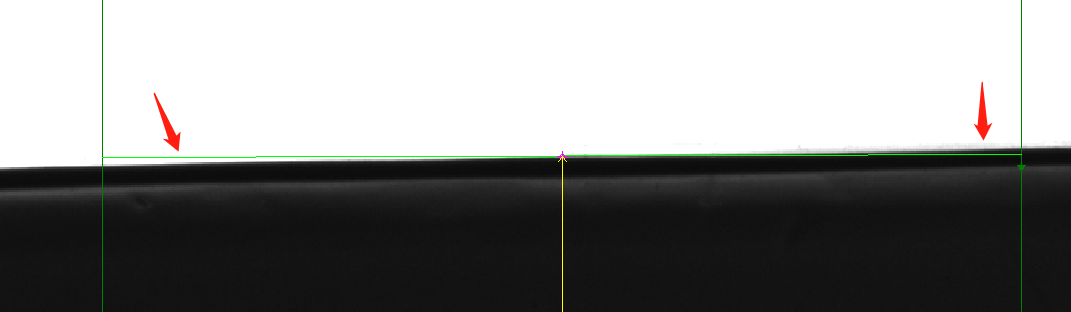
然后还有一个问题,如下图:
注意看箭头所示的位置,生成的拟合线根本没有贴着电池的边走。
我感觉这种测量的任务是不是应该用找线工具,而不是卡尺工具?
果然,试了一下找线工具,确实是多组卡尺够成的一个组合体。
相当于每个卡尺生成一个点。
在找线的选择框中,拉动中间那根线的长度,可以改变卡尺数量。
那个箭头可以改变搜索方向,鼠标按住它可以旋转整个选择框。
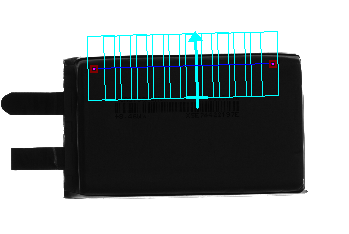
选择LastRun查看找线的结果。
可以看到结果很好。如同参数上设置的,卡尺数量11,点的数量就有11个。

放大观察一下。我们会观察到捕捉的点有亚像素精度的处理。
即一个点的位置可以小于1个像素,它是一个浮点数而不是一个整数,下图中一个方块是一个像素,而十字不位于方块中心,而是在其1/N的位置,因此证明这个点在处理的时候考虑了亚像素精度。
勇哥学习openCV的时候,知道它的一些算子,处理精度则为像素级,就不是亚像素精度了。