现在很多的APP都有"附近的人"功能。
粗略的思考一下,用户在登录的时候会将自己的位置信息告诉服务器,服务器会记录一份用户的位置信息列表。
假设服务器里只有10个人,那么要找附近的人就很简单,只需写一个算距离的函数,然后依次遍历长度是10的位置信息列表,距离从近到远排序,返回排序后的列表即可。
那么如果服务器里有1千万人呢,或者几亿人呢,比如微信。这时再从头到尾遍历(复杂度O(n))就不适合了。
通常情况下会使用“四叉树”来构建这些大量的位置信息。
1.四叉树
顾名思义,四叉树是叶子节点最多为4的树结构。由于采用的树结构,复杂度则变成了树的深度 O(logn)了。

2.地理位置和四叉树
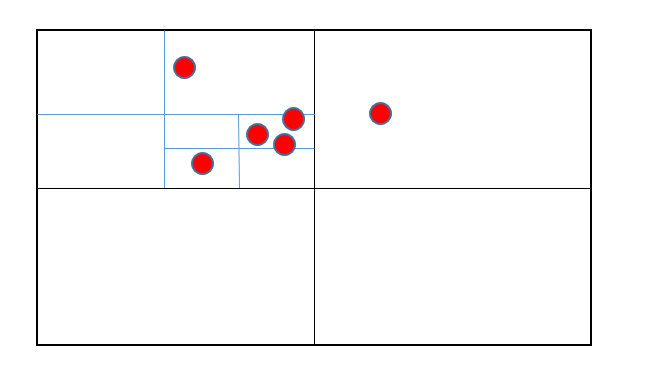
把全球的位置定义为一个矩形,用经度和纬度的二维数据来定位全球范围内的点。
纬度范围[-90,90],经度范围[-180,180]。
当登录服务器的人数越来越多时,超过一个约定的值,就将这个矩形分割成4个更小的矩形,将这些位置信息分发到更小的矩形里(比如分成太平洋,大西洋等)
更小的矩形存储的信息又要超过约定的值了,就再分割。
3.查找附近的点
假设我在广州天河的华农的图书馆,想要找到附近的10个人的位置。
那么首先需要从根节点(全球)遍历到天河区的节点,搜寻这个节点的列表里有没有10个人。
如果不够10个人,则向上一层的广州节点请求,可能会在海珠区找到剩余的人。
4.C++描述算法
以上就是四叉树搜索位置的关键点,那么就简单用C++来编写代码描述这个算法。
github:https://github.com/yao2yao/QuadTree.git
我采用的是位置全部信息存储在叶子的四叉树。
首先是核心的数据结构树的节点:
struct QuadTreeNode { QuadTreeNode(){} Rect rect; //节点代表的矩形区域 std::vector<PosInfo> pos_array; //节点中的位置信息 int child_num; //节点的孩子节点数量 QuadTreeNode *child[CHILD_NUM]; //指向孩子节点的指针 int depth; //节点的深度 };
创建一个节点:
void QuadTree::CreateQuadTreeNode(int depth, Rect rect, QuadTreeNode *p_node) { p_node->depth = depth; p_node->child_num = 0; p_node->pos_array.clear(); p_node->rect = rect; for (int i = 0; i < CHILD_NUM; ++i) { p_node->child[i] = NULL; } }
分割一个节点:
这里采用均分法,即取x坐标和y坐标的一半划分。new四个节点,并且作为当前结点的4个孩子节点。
void QuadTree::Split(QuadTreeNode *pNode) { int start_x = pNode->rect.lb_x; int start_y = pNode->rect.lb_y; int sub_width = (pNode->rect.rt_x - pNode->rect.lb_x) / 2; int sub_height = (pNode->rect.rt_y - pNode->rect.lb_y) / 2; int end_x = pNode->rect.rt_x; int end_y = pNode->rect.rt_y; QuadTreeNode *p_node0 = new QuadTreeNode; QuadTreeNode *p_node1 = new QuadTreeNode; QuadTreeNode *p_node2 = new QuadTreeNode; QuadTreeNode *p_node3 = new QuadTreeNode; CreateQuadTreeNode(pNode->depth + 1, Rect(start_x + sub_width, start_y + sub_height, end_x, end_y), p_node0); CreateQuadTreeNode(pNode->depth + 1, Rect(start_x, start_y + sub_height, start_x + sub_width, end_y), p_node1); CreateQuadTreeNode(pNode->depth + 1, Rect(start_x, start_y, start_x + sub_width, start_y + sub_height), p_node2); CreateQuadTreeNode(pNode->depth + 1, Rect(start_x + sub_width, start_y, end_x, start_y + sub_height), p_node3); pNode->child[0] = p_node0; pNode->child[1] = p_node1; pNode->child[2] = p_node2; pNode->child[3] = p_node3; pNode->child_num = 4; }
一个辅助函数,给一个指定节点,和目标位置,返回所在的象限。
象限划分:
/* 一个矩形区域的象限划分: UL(1) | UR(0) --------|----------- LL(2) | LR(3) */
int QuadTree::GetIndex(PosInfo pos, QuadTreeNode *pNode) { int start_x = pNode->rect.lb_x; int start_y = pNode->rect.lb_y; int sub_width = (pNode->rect.rt_x - pNode->rect.lb_x) / 2; int sub_height = (pNode->rect.rt_y - pNode->rect.lb_y) / 2; int end_x = pNode->rect.rt_x; int end_y = pNode->rect.rt_y; start_x + sub_width, start_y + sub_height, end_x, end_y; //0象限 if ((pos.latitude >= start_x + sub_width) && (pos.latitude <= end_x) && (pos.longitude >= start_y + sub_height) && (pos.longitude <= end_y)) { return UR; } //1象限 else if ((pos.latitude >= start_x) && (pos.latitude < start_x + sub_width) && (pos.longitude >= start_y + sub_height) && (pos.longitude <= end_y)) { return UL; } //2象限 else if ((pos.latitude >= start_x) && (pos.latitude < start_x + sub_width) && (pos.longitude >= start_y) && (pos.longitude < start_y + sub_height)) { return LL; } //3象限 else if ((pos.latitude >= start_x + sub_width) && (pos.latitude <= end_x) && (pos.longitude >= start_y) && (pos.longitude < start_y + sub_height)) { return LR; } else { return INVALID; } }
接下来是关键点,插入函数,当数据一组一组出现的时候,如何构建一棵四叉树:
可以从根节点开始,如果该节点有孩子,则插入对应象限的孩子节点。
否则的话,判断当前结点的位置信息容量和深度。
如果位置信息还没满,深度在预先设定的范围内,则将位置信息插入当前结点。
否则需要将当前结点分割,并且把位置信息分发到各个新的孩子节点,删除自身的位置信息。然后重新对当前结点做一次插入操作。
void QuadTree::Insert(PosInfo pos, QuadTreeNode *p_node) { if (p_node == NULL) { return; } if (p_node->child_num != 0) { int index = GetIndex(pos, p_node); if (index >= UR && index <= LR) { Insert(pos, p_node->child[index]); } } else { if ((int)p_node->pos_array.size() >= m_maxobjects && p_node->depth < m_depth) { Split(p_node); for (std::vector<PosInfo>::iterator it = p_node->pos_array.begin(); it != p_node->pos_array.end(); ++it) { Insert(*it, p_node); } p_node->pos_array.clear(); Insert(pos, p_node); } else { p_node->pos_array.push_back(pos); } } }
搜索附近的点:
从根节点遍历到目标节点所在节点,遍历该节点所有的位置信息点。
假如数量不够,则向上到父节点,搜寻兄弟节点,直到获得足够数量的位置信息点。
void QuadTree::Search(int num, PosInfo pos_source, std::vector<PosInfo> &pos_list, QuadTreeNode *p_node) { if (p_node == NULL) { return; } if ((int)pos_list.size() >= num) { return; } if (p_node->child_num == 0) { for (std::vector<PosInfo>::iterator it = p_node->pos_array.begin(); it != p_node->pos_array.end(); ++it) { if ((int)pos_list.size() >= num) { return; } pos_list.push_back(*it); } return; } //目标节点 int index = GetIndex(pos_source, p_node); if (index >= UR && index <= LR) { if (p_node->child[index] != NULL) { Search(num, pos_source, pos_list, p_node->child[index]); } } //目标节点的兄弟节点 for (int i = 0; i < CHILD_NUM; ++i) { if (index != i && p_node->child[i] != NULL) { Search(num, pos_source, pos_list, p_node->child[i]); } } }
如果算法没错的||—_—||
数据测试,随机1千万组数据,输入一个目标位置,搜索15个附近点的耗时是2毫秒。
随机1亿组数据,耗时是37毫秒。(插入数据用了一个小时,打印了一个1G的TXT)。。。。