My initial attempt to port over an old Actionscript program, here it goes in main.brs.
Library "v30/bslDefender.brs" ''''''''''''''''''''''''''''''''''''''''''''''''''' ' function Main() as void screen = CreateObject("roScreen") port = CreateObject("roMessagePort") screen.SetMessagePort(port) screen.SetAlphaEnable(true) m.PI = 3.14159265358979323846264338327958209749445923078164 m.origin = { x:1280/2, y:720/2, z:0 } m.focal_length = 400 m.scene = { x:m.origin.x, y:m.origin.y } m.axis_rotation = { x:0, y:0, z:0 } m.camera = { x:0, y:0, z:0 } LINE_COLOR = &h00ee00ff VERTEX_COLOR = &h00dd00ff m.len = 80 m.points = [ ' vertex3d(-m.len, -m.len, -m.len), vertex3d(m.len, -m.len, -m.len), vertex3d(m.len, -m.len, m.len), vertex3d(-m.len, -m.len, m.len), ' vertex3d(-m.len, m.len, -m.len), vertex3d(m.len, m.len, -m.len), vertex3d(m.len, m.len, m.len), vertex3d(-m.len, m.len, m.len), ] ' Initialize drawing points, skip ' screen.Clear(&h000000ff) ' for i=0 to m.points.count()-1 step 1 ' screen.DrawPoint(m.points[i].x, m.points[i].y, 4, &h00ff00ff) ' end for ' screen.finish() timer = CreateObject("roTimespan") start_time = timer.TotalMilliseconds() while(true) current_time = timer.TotalMilliseconds() if (current_time - start_time > 1000/30) screen.Clear(&h000000ff) ' Rotation m.axis_rotation.x = m.axis_rotation.x + 0.001 m.axis_rotation.y = m.axis_rotation.y + 0.001 m.axis_rotation.z = m.axis_rotation.z + 0.001 ' 3D translation simulated projected = project_pts(m.points) ' Top face screen.drawLine(projected[0].x, projected[0].y, projected[1].x, projected[1].y, line_color) screen.drawLine(projected[1].x, projected[1].y, projected[2].x, projected[2].y, line_color) screen.drawLine(projected[2].x, projected[2].y, projected[3].x, projected[3].y, line_color) screen.drawLine(projected[3].x, projected[3].y, projected[0].x, projected[0].y, line_color) ' Bottom face screen.drawLine(projected[4].x, projected[4].y, projected[5].x, projected[5].y, line_color) screen.drawLine(projected[5].x, projected[5].y, projected[6].x, projected[6].y, line_color) screen.drawLine(projected[6].x, projected[6].y, projected[7].x, projected[7].y, line_color) screen.drawLine(projected[7].x, projected[7].y, projected[4].x, projected[4].y, line_color) ' Vertices screen.drawLine(projected[0].x, projected[0].y, projected[4].x, projected[4].y, line_color) screen.drawLine(projected[1].x, projected[1].y, projected[5].x, projected[5].y, line_color) screen.drawLine(projected[2].x, projected[2].y, projected[6].x, projected[6].y, line_color) screen.drawLine(projected[3].x, projected[3].y, projected[7].x, projected[7].y, line_color) ' Vertex for i=0 to projected.count()-1 step 1 screen.DrawPoint(projected[i].x, projected[i].y, 4, vertex_color) end for screen.finish() end if end while End Function ''''''''''''''''''''''''''''''''''''''''''''''''''' ' 3D translation simulated function project_pts(points as Object) as Object projected = [] sin_x = sin(m.axis_rotation.x) cos_x = cos(m.axis_rotation.x) sin_y = sin(m.axis_rotation.y) cos_y = cos(m.axis_rotation.y) sin_z = sin(m.axis_rotation.z) cos_z = cos(m.axis_rotation.z) for i=0 to m.points.count()-1 step 1 x = m.points[i].x y = m.points[i].y z = m.points[i].z ' rotate about x axis xy = cos_x*y - sin_x*z xz = sin_x*y + cos_x*z ' rotate about y axis yz = cos_y*xz - sin_y*x yx = sin_y*xz + cos_y*x ' rotate about z axis zx = cos_z*yx - sin_z*xy zy = sin_z*yx + cos_z*xy scale = m.focal_length/(m.focal_length+yz-m.camera.z) x = zx*scale - m.camera.x 'get x position in the view of camera y = zy*scale - m.camera.y 'get y position in the view of camera projected[i] = vertex3d(x+m.scene.x, y+m.scene.y, yz, scale) end for return projected end function ''''''''''''''''''''''''''''''''''''''''''''''''''' ' Return a vector point function vertex3d(x as Integer, y as Integer, z as Integer, scale = 1 as Integer) as Object return { x:x, y:y, z:z, scale:scale } end function
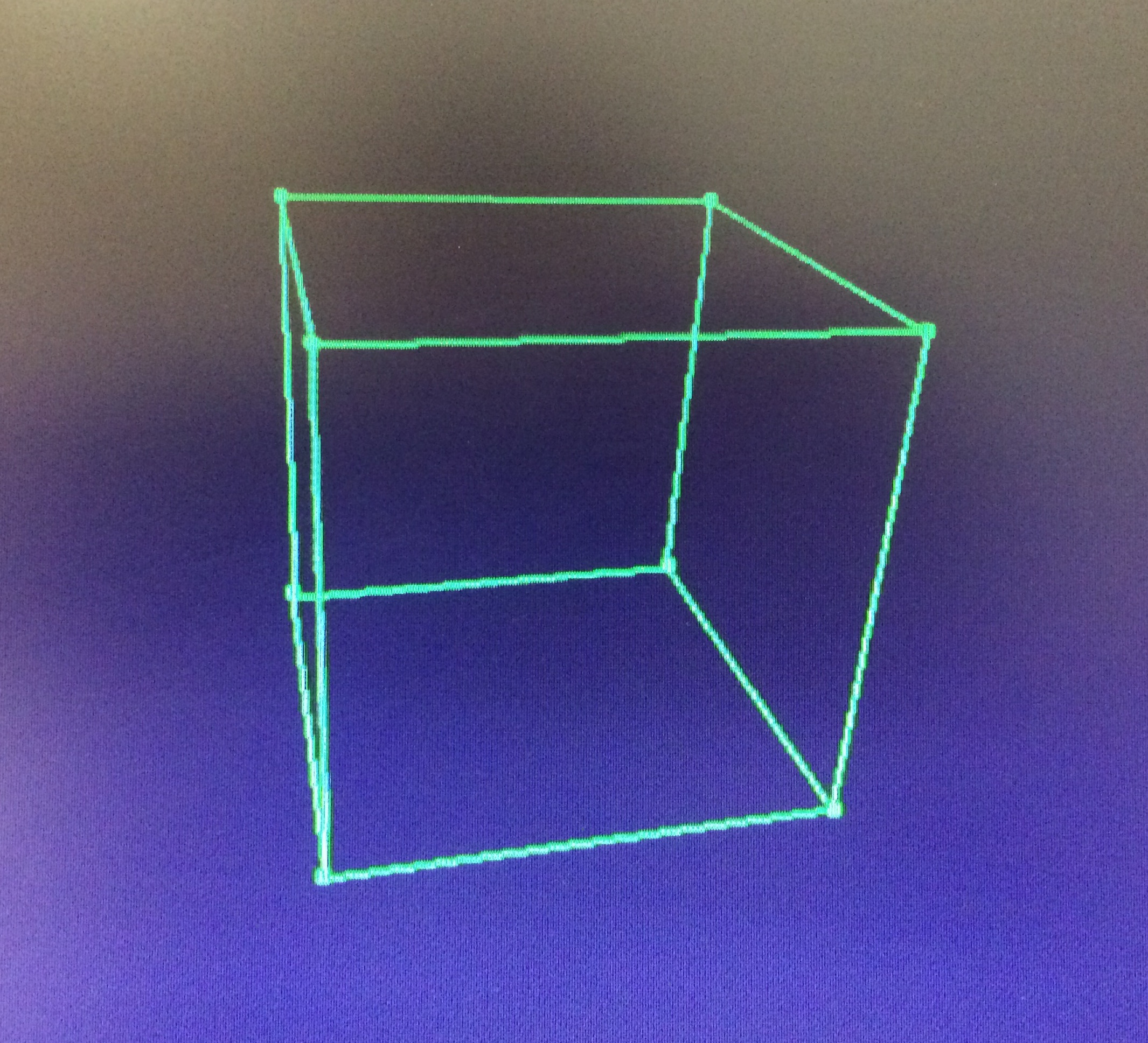
And a screen shot:
-- Regards