三维凸包
Tags:高级算法
Part 1 平面几何基础
出门右拐:https://www.cnblogs.com/xzyxzy/p/10033130.html (附计算几何题单)
Part 2 立体几何基础
向量运算
加减运算
同平面向量,对应坐标相加减
模长
(|a|=sqrt{x^2+y^2+z^2})
点积
两个向量的点积仍然表示 a到b的投影×b的模长
仍然满足(a·b=|a||b|cos<a,b>)
坐标下有((x_1,y_1,z_1)·(x_2,y_2,z_2)=x_1x_2+y_1y_2+z_1z_2),对应坐标相乘
叉积
两个三维向量叉积仍然是一个三维向量(不同于平面向量,乘积是实数)
其模长仍然表示以这两个三维向量作为邻边的平行四边形面积
方向符合:对于(a*b),伸出右手,食指指向(a),中指指向(b),大拇指所对的方向为叉积后的向量方向

如上图,(AC*AB=AD)
坐标表示就是:((y_1z_2-z_1y_2,z_1x_2-x_1z_2,x_1y_2-y_1x_2))
平面的法向量
在平面上任选两个向量做叉积即可
判断点是否在平面上
平面ABC,判断D是否在平面上。
法向量n,则若AD&n=0,点积为零,说明D在平面上。
点到平面的距离
该点到平面上任意一点的向量 点积 平面的法向量
然后除以法向量的模长
double Dis(Node a) {Node w=Normal();return fabs((w&(a-A[v[0]]))/w.len());}
求凸包
扰动
首先对其微小扰动,避免出现四点共面的情况
平面的记录
扰动之后各个平面一定是一个三角形,逆时针方向记录三个顶点表示一个面
增量构造
借用网上这篇博客的图片方便理解
对于一个已知凸包,新增一个点P
将P视作一个点光源,向凸包做射线
可以知道,光线的可见面和不可见面一定是由若干条棱隔开的
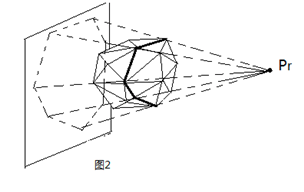
将光的可见面删去,并新增由其分割棱与P构成的平面

重复此过程即可,复杂度(O(n^2)),分析见Pick定理、欧拉公式和圆的反演。
代码
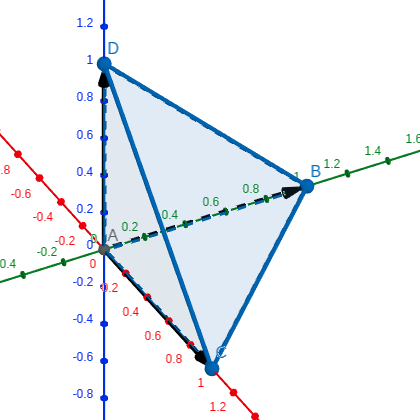
洛谷模板:求三维凸包面积
先放上样例的两张靓照:
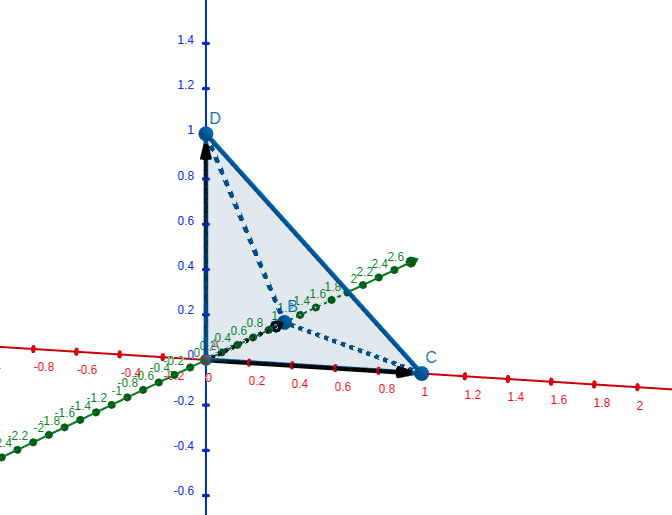
强烈推荐画图软件Geogebra!
#include<iostream>
#include<cstdio>
#include<cstdlib>
#include<cmath>
using namespace std;
const int N=2010;
const double eps=1e-9;
int n,cnt,vis[N][N];
double ans;
double Rand() {return rand()/(double)RAND_MAX;}
double reps() {return (Rand()-0.5)*eps;}
struct Node
{
double x,y,z;
void shake() {x+=reps();y+=reps();z+=reps();}
double len() {return sqrt(x*x+y*y+z*z);}
Node operator - (Node A) {return (Node){x-A.x,y-A.y,z-A.z};}
Node operator * (Node A) {return (Node){y*A.z-z*A.y,z*A.x-x*A.z,x*A.y-y*A.x};}
double operator & (Node A) {return x*A.x+y*A.y+z*A.z;}
}A[N];
struct Face
{
int v[3];
Node Normal() {return (A[v[1]]-A[v[0]])*(A[v[2]]-A[v[0]]);}
double area() {return Normal().len()/2.0;}
}f[N],C[N];
int see(Face a,Node b) {return ((b-A[a.v[0]])&a.Normal())>0;}
void Convex_3D()
{
f[++cnt]=(Face){1,2,3};
f[++cnt]=(Face){3,2,1};
for(int i=4,cc=0;i<=n;i++)
{
for(int j=1,v;j<=cnt;j++)
{
if(!(v=see(f[j],A[i]))) C[++cc]=f[j];
for(int k=0;k<3;k++) vis[f[j].v[k]][f[j].v[(k+1)%3]]=v;
}
for(int j=1;j<=cnt;j++)
for(int k=0;k<3;k++)
{
int x=f[j].v[k],y=f[j].v[(k+1)%3];
if(vis[x][y]&&!vis[y][x]) C[++cc]=(Face){x,y,i};
}
for(int j=1;j<=cc;j++) f[j]=C[j];
cnt=cc;cc=0;
}
}
int main()
{
cin>>n;
for(int i=1;i<=n;i++) cin>>A[i].x>>A[i].y>>A[i].z,A[i].shake();
Convex_3D();
for(int i=1;i<=cnt;i++) ans+=f[i].area();
printf("%.3f
",ans);
}