前言
在写服务外包的时候了解了下室内蓝牙定位技术,整理了下。
实现原理
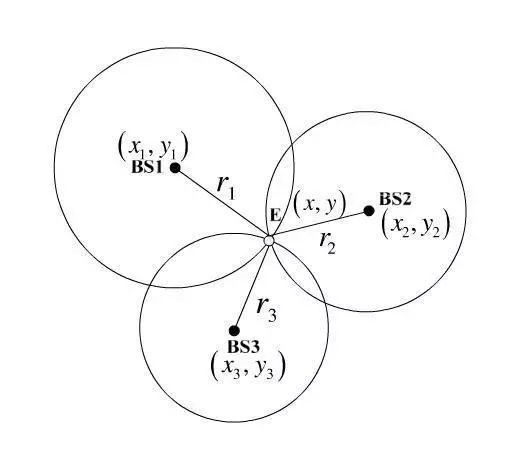
蓝牙定位基于RSSII(Received Signal Strength Indication,信号场强指示)值,通过三角定位原理进行定位。
蓝牙室内定位方案分为终端侧定位和网络侧定位。在本次定位需求中,我们采用网络侧定位,其基本原理如下:
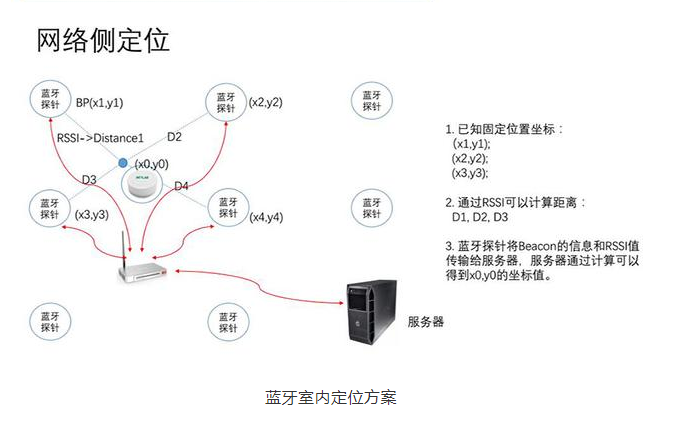
在公司工厂中,我们根据流水线位置,夹具分布疏密程度等其他因素,在工厂中分布不同位置的蓝牙探针(x,y),并且记录于数据库当中。在每个需要定位的夹具上配备蓝牙装置,当查询定位结果时,我们已知固定位置(x1,y1),(x2,y2),(x3,y3),根据RSSI计算
[ left[
egin{matrix}
(x-x1)^2+(y-y1)^2 \
(x-x2)^2+(y-y2)^2 \
(x-x3)^2+(y-y3)^2
end{matrix}
ight]
=
left[
egin{matrix}
d_1^2 \
d_2^2\
d_3^2
end{matrix}
ight]
]
[left[
egin{matrix}
x \
y
end{matrix}
ight]
=
left[
egin{matrix}
2(x1-x3) * 2(y1-y3) \
2(x2-x3) * 2(y2-y3)
end{matrix}
ight] ^{-1}
left[
egin{matrix}
x_1^2 -x_3^2+ y_1^2 -y_3^2+d_3^2 -d_1^2\
x_1^2 -x_3^2+ y_2^2 -y_3^2+d_3^2 -d_2^2
end{matrix}
ight]
]
我们可以理论上得出夹具位置(x,y),但是在实际的情况下常常会出现一些问题需要我们去解决。
- 问题一:自由空间传播,无线信号的功率时随着距离的α次幂降低的,发送功率为Pt时,经过d米的传输距离后,接受信号功率Pr与d*Pt成正比,在理想状态下,无线电波在自由空间中传播时,信号功率的衰减与收发机距离的平方成正比。通常情况假设参考天线为各向同性源,即在所有方向均匀辐射的天线,辐射功率均匀地通过一个便面积为(4{pi}d^2)的球体,则接受信号功率可表示为如下形式:
[P_r=P_tG_tG_r(dfrac{lambda}{4{pi}d})
]
其中,Gr和Gr分别为发射天线与接收天线的功率增益;d是收发机之间的距离;λ为载波波长, λ与无线载波频率ƒ成倒数关系,λ=c/ƒ,c为光速(约为(3*10^8)m/s)。如果取参考距离(d_0)(通常为1米),那么(d_0)处的接受信号强度为:
[P_0=P_tG_tG_r(dfrac{lambda}{4{pi}d_0})
]
则典型的路径损耗模型如式:
[overline{PL}(d)[dB]=overline{PL}(d)[dB]+10nlog(dfrac{d}{d_0})
]
- 问题二:由障碍物阻挡造成的阴影效应,接受信号强度下降,但该场强中值随地理改变缓慢变化。由于场强中值随地理坏境改变的变化较慢,又称为慢衰弱。
慢衰弱是以较大的空间尺度来度量的,其衰弱速率主要取决于传播环境,主要为工厂中机器的阻挡,是由信号的频率以及障碍物的状况决定。
通过对实测数据进行统计分析,结果表明接受信号的场强中值近视服从对数正态分布。由此可得,阴影衰弱与传播距离以及阴影损耗的关系可表示为
[overline{PL}(d)[dB]=overline{PL}(d)[dB]+10nlog(dfrac{d}{d_0})+X_partial
]
其中,(X_partial)是一个零均值,标准差为(partial)的高斯随机变量,n与(partial)的取决值依赖于周边环境于建筑类型。