入了自动驾驶+DRL的坑了,要求先安装carla进行环境模拟。
首先,下载Carla,我是win10系统。国内下carla很慢,我就找了一个百度云资源:
链接:https://pan.baidu.com/s/1ioF4V-QcEWP8qpyZyR_kGw
提取码:7as5
下载完毕后,进入WindowsNoEditor,运行CarlaUE4.exe。如果提示
"The following component(s) are required to run this program: DirectX Runtime"
则前往
https://www.microsoft.com/en-us/download/confirmation.aspx?id=35
安装DirectX,安装后运行即可。
然后就顺利进入这个界面了:
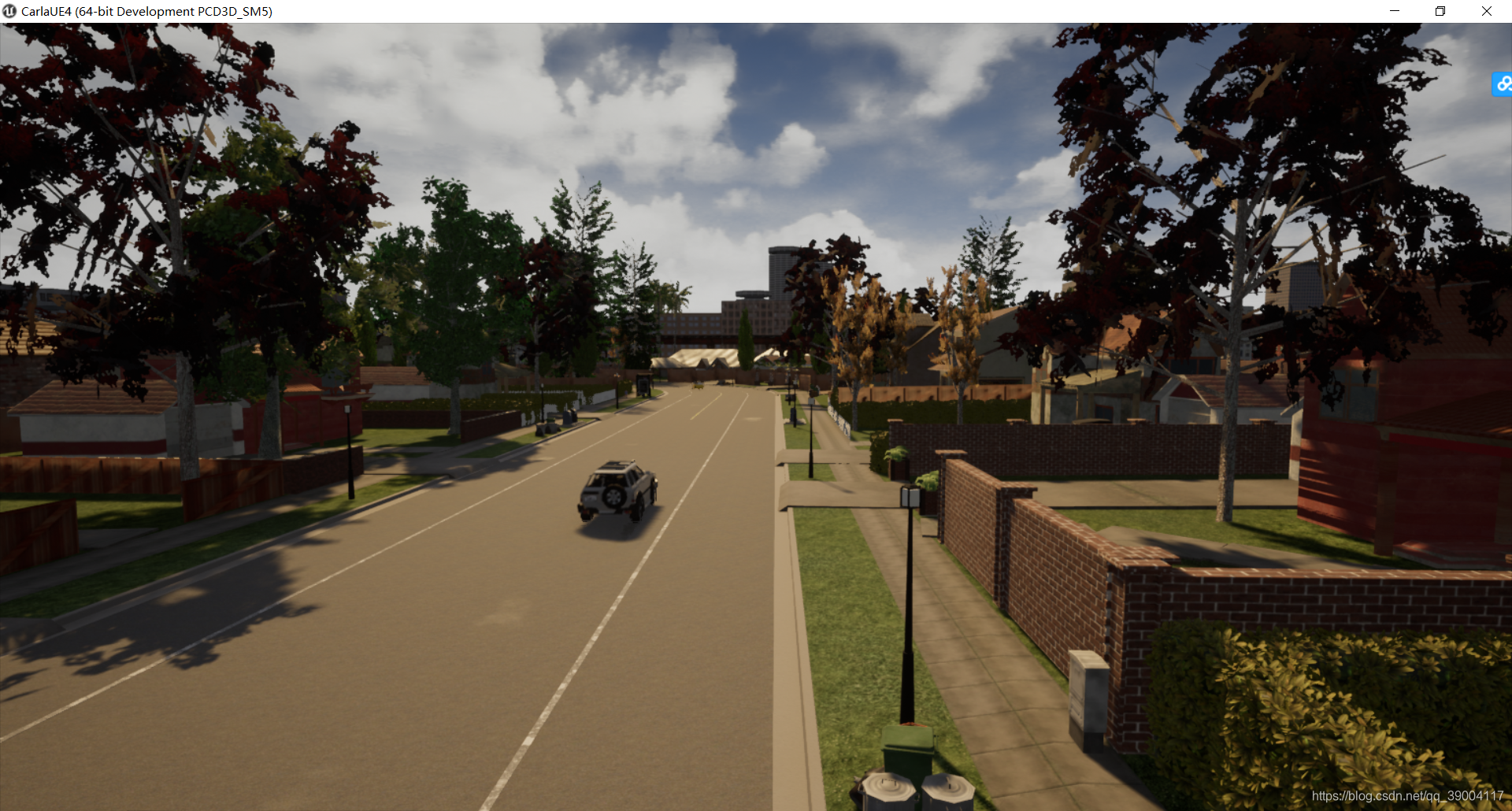
如果没有车和人,则使用命令行进入
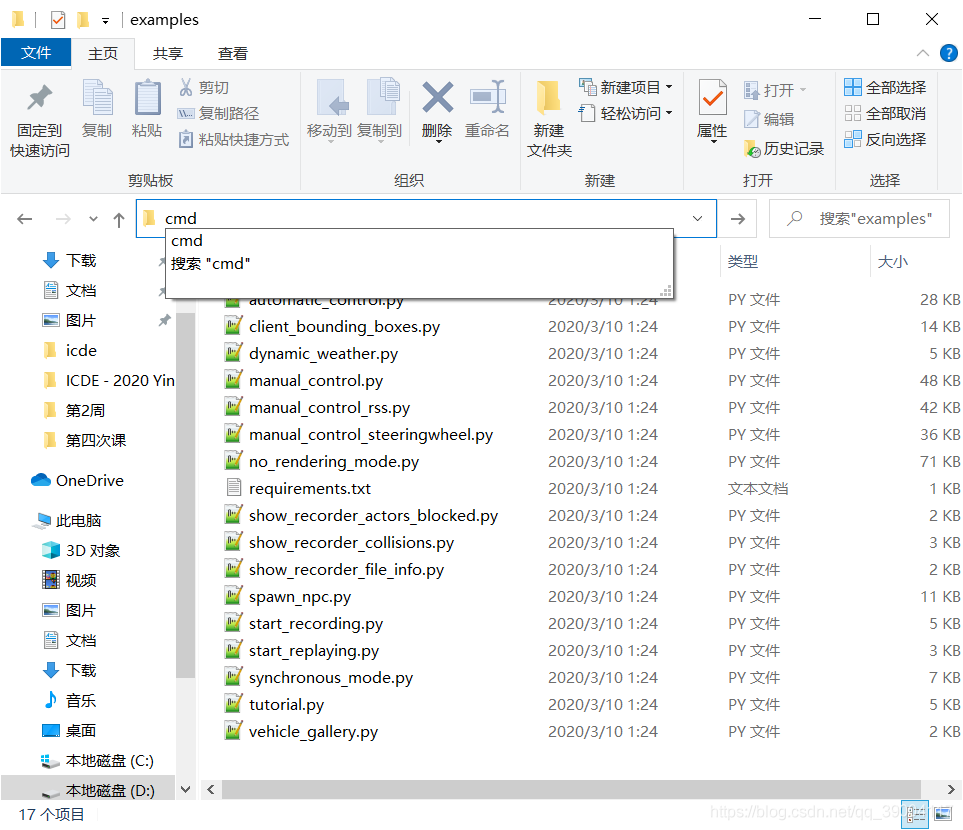
D:CARLA_0.9.8WindowsNoEditorPythonAPIexamples
这个子目录
(一个比较方便的做法是进入这个目录,然后在路径那部分输入cmd)
在命令行中输入:
python spawn_npc.py -n 80
视野中就出现车和人了。
如果要自己操控,还是新开一个命令行,进入上面的目录,在cmd中输入:
python manual_control.py
如果提示缺少什么python相关的包,安装上即可,最后可以出现一辆你自己可以控制的车:
使用awsd和鼠标就可以控制啦~
如果出现的是摩托车也不要奇怪~不知道这个环境中有没有可以控制的自行车:)
然后我们就开始使用python愉快的玩耍吧
————————————————
原文链接:https://blog.csdn.net/qq_39004117/java/article/details/105680609