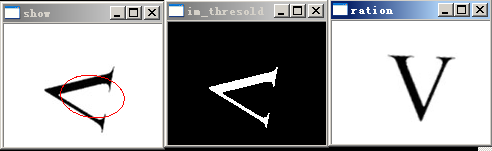
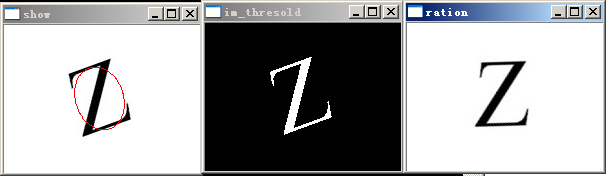
通过求外接椭圆,算出纠正角度
// ration2.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "highgui.h"
#include "cv.h"
#include "cxcore.h"
#ifdef DEBUG
#pragma comment(lib," opencv_core231d.lib")
#pragma comment(lib,"opencv_features2d231d.lib")
#pragma comment(lib,"opencv_flann231d.lib")
#pragma comment(lib,"opencv_gpu231d.lib")
#pragma comment(lib,"opencv_highgui231d.lib")
#pragma comment(lib,"opencv_imgproc231d.lib")
#else
#pragma comment(lib,"opencv_core231.lib")
#pragma comment(lib,"opencv_features2d231.lib")
#pragma comment(lib,"opencv_flann231.lib")
#pragma comment(lib,"opencv_gpu231.lib")
#pragma comment(lib,"opencv_highgui231.lib")
#pragma comment(lib,"opencv_imgproc231.lib")
#endif
int _tmain(int argc, _TCHAR* argv[])
{
IplImage * im_src = cvLoadImage("V100.jpg",CV_LOAD_IMAGE_GRAYSCALE);
IplImage * im_show = cvCreateImage(cvGetSize(im_src),8,3);
cvConvertImage(im_src,im_show);
IplImage * im_threshold =cvCreateImage(cvGetSize(im_src),8,1);
cvNot(im_src,im_src);
cvThreshold(im_src,im_threshold,0,255,CV_THRESH_OTSU);
cvShowImage("im_thresold",im_threshold);
CvMemStorage *storage = cvCreateMemStorage(0);
CvSeq * contour = NULL;
cvFindContours(im_threshold,storage,&contour);
float angle ;
for (;contour!=0;contour=contour->h_next)
{
if (contour->total > 10)
{
CvBox2D ellipse = cvFitEllipse2(contour);
cvEllipseBox(im_show,ellipse,CV_RGB(255,0,0));
angle = ellipse.angle - 180 ;
printf("%f \n",ellipse.angle);
}
}
IplImage * ration = cvCreateImage(cvGetSize(im_src),8,1);
float m[6];
CvMat M = cvMat( 2, 3, CV_32F, m );
CvPoint2D32f pt = cvPoint2D32f(im_src->width/2.0, im_src->height/2.0);
cv2DRotationMatrix(pt, angle, 1.0, &M);
cvWarpAffine(im_src,ration,&M,CV_INTER_AREA |CV_WARP_FILL_OUTLIERS,cvScalarAll(0));
cvNot(ration,ration);
cvSaveImage("s.bmp",ration);
cvShowImage("ration",ration);
cvShowImage("show",im_show);
cvWaitKey(-1);
getchar();
cvReleaseImage(&ration);
cvReleaseImage(&im_threshold);
cvReleaseImage(&im_src);
return 0;
}