强化学习

马尔科夫决策过程
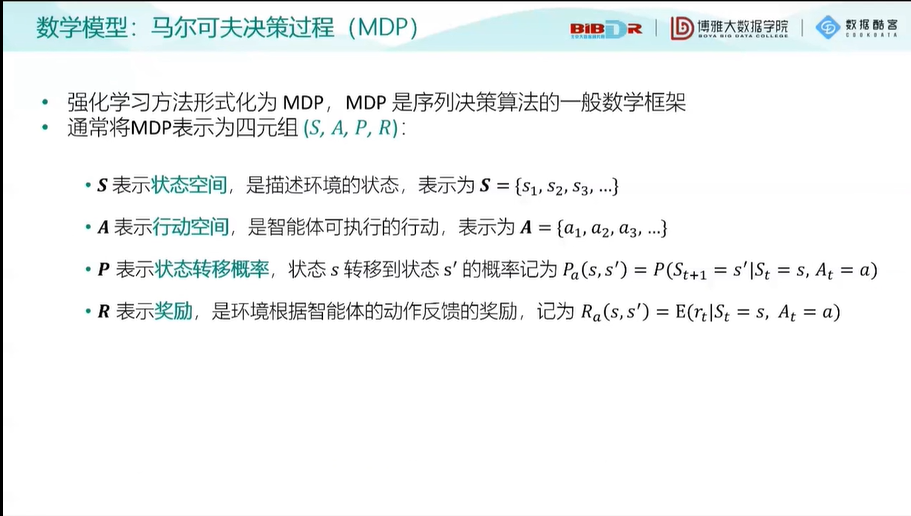
状态价值函数

使用强化学习算法训练智能体玩Flappy Bird游戏


import pygame import sys import numpy as np import random import pygame.surfarray as surfarray from pygame.locals import * from itertools import cycle import tensorflow as tf import cv2 tf.compat.v1.disable_eager_execution() def load(): # 加载三种小鸟的动作图片——上中下 # 应用的图片可在网页中下载 PLAYER_PATH = ( 'redbird-upflap.jpg', 'redbird-midflap.jpg', 'redbird-downflap.jpg' ) # 加载整体背景为黑色,此处为最底端的背景板 BACKGROUND_PATH = 'background-black.jpg' # 加载管道图片 PIPE_PATH = 'pipe-green.jpg' #图像,声音,撞击的 IMAGES, SOUNDS, HITMASKS = {}, {}, {} # 显示分数的数字图片 IMAGES['numbers'] = ( pygame.image.load('0.jpg').convert_alpha(), # convert_alpha()方法会使用透明方法绘制前景对象 pygame.image.load('1.jpg').convert_alpha(), pygame.image.load('2.jpg').convert_alpha(), pygame.image.load('3.jpg').convert_alpha(), pygame.image.load('4.jpg').convert_alpha(), pygame.image.load('5.jpg').convert_alpha(), pygame.image.load('6.jpg').convert_alpha(), pygame.image.load('7.jpg').convert_alpha(), pygame.image.load('8.jpg').convert_alpha(), pygame.image.load('9.jpg').convert_alpha() ) # 游戏的基础背景 IMAGES['base'] = pygame.image.load('base.jpg').convert_alpha() # 加载背景 IMAGES['background'] = pygame.image.load(BACKGROUND_PATH).convert() # 加载小鸟动作图片 IMAGES['player'] = ( pygame.image.load(PLAYER_PATH[0]).convert_alpha(), pygame.image.load(PLAYER_PATH[1]).convert_alpha(), pygame.image.load(PLAYER_PATH[2]).convert_alpha(), ) # 加载管道,一对相对的上下管道 IMAGES['pipe'] = ( pygame.transform.rotate(pygame.image.load(PIPE_PATH).convert_alpha(), 180), pygame.image.load(PIPE_PATH).convert_alpha(), ) # 得到管道边界的坐标 HITMASKS['pipe'] = ( getHitmask(IMAGES['pipe'][0]), getHitmask(IMAGES['pipe'][1]), ) # 得到小鸟边界的坐标 HITMASKS['player'] = ( getHitmask(IMAGES['player'][0]), getHitmask(IMAGES['player'][1]), getHitmask(IMAGES['player'][2]), ) return IMAGES, SOUNDS, HITMASKS def getHitmask(image): """返回图片的边界坐标值""" # mask用来存储图片的边界坐标列表 mask = [] # 从左到右,从上到下将坐标依次保存到mask中 for x in range(image.get_width()): mask.append([]) for y in range(image.get_height()): mask[x].append(bool(image.get_at((x,y))[3])) # 返回边界坐标列表 return mask # 游戏帧数为30 FPS = 30 # 游戏屏幕宽度 SCREENWIDTH = 288 # 游戏屏幕高度 SCREENHEIGHT = 512 # 设置一对上下管道之间的间隔 PIPEGAPSIZE = 100 # 游戏基础背景的高度,以左上角为坐标起始点 BASEY = SCREENHEIGHT * 0.79 # #初始化pygame pygame.init() # pygame.time.Clock对象帮助确定程序要以多大的帧速率运行,这个对象在游戏每一次迭代都会设置一个暂停,以防止程序运行过快, # 有时候计算机的速度过快,就可以利用这个对象来让计算机在一个固定的速度运行 FPSCLOCK = pygame.time.Clock() # 在没有屏幕的情况下训练需要显示的程序 import os os.environ['SDL_VIDEODRIVER'] = 'dummy' # 初始化屏幕 SCREEN = pygame.display.set_mode((SCREENWIDTH, SCREENHEIGHT)) # 设置窗口的标题 pygame.display.set_caption('Flappy Bird') # 调用load函数,加载所需要的图片、边界 IMAGES, SOUNDS, HITMASKS = load() # 记录小鸟的宽度与高度 PLAYER_WIDTH = IMAGES['player'][0].get_width() PLAYER_HEIGHT = IMAGES['player'][0].get_height() # 记录管道的宽度和高度 PIPE_WIDTH = IMAGES['pipe'][0].get_width() PIPE_HEIGHT = IMAGES['pipe'][0].get_height() # 记录背景的宽度和宽度 BACKGROUND_WIDTH = IMAGES['background'].get_width() BACKGROUND_HEIGTH = IMAGES['background'].get_height() # 创建迭代对象,小鸟状态的循环,0表示下落,1表示平飞,2表示向上 PLAYER_INDEX_GEN = cycle([0, 1, 2, 1]) def getRandomPipe(): # 设置上下管道的间距差 gapYs = [20, 30, 40, 50, 60, 70, 80, 90] # 随机抽取一个间距差设置为新出现管道的基本参数 index = random.randint(0, len(gapYs)-1) gapY = gapYs[index] # 计算管道高度 gapY += int(BASEY * 0.2) # 将新建管道的横坐标设置为屏幕宽度之后,在下一次刷新屏幕即可出现 pipeX = SCREENWIDTH + 10 # 返回一对新建管道 return [ {'x': pipeX, 'y': gapY - PIPE_HEIGHT}, # 上管道 {'x': pipeX, 'y': gapY + PIPEGAPSIZE}, # 下管道 ] def checkCrash(player, upperPipes, lowerPipes): # 小鸟图片的宽度和高度 pi = player['index'] player['w'] = IMAGES['player'][0].get_width() player['h'] = IMAGES['player'][0].get_height() # 判断是否坠落到地板 if player['y'] + player['h'] >= BASEY - 1: return True else: playerRect = pygame.Rect(player['x'], player['y'], player['w'], player['h']) # 对于所有的上、下管道都进行判断 for uPipe, lPipe in zip(upperPipes, lowerPipes): # 上、下管道的基本数值的赋值 uPipeRect = pygame.Rect(uPipe['x'], uPipe['y'], PIPE_WIDTH, PIPE_HEIGHT) lPipeRect = pygame.Rect(lPipe['x'], lPipe['y'], PIPE_WIDTH, PIPE_HEIGHT) # 小鸟和管道的边界设置 pHitMask = HITMASKS['player'][pi] uHitmask = HITMASKS['pipe'][0] lHitmask = HITMASKS['pipe'][1] # 检查是否碰撞到上管道或者下管道 uCollide = pixelCollision(playerRect, uPipeRect, pHitMask, uHitmask) lCollide = pixelCollision(playerRect, lPipeRect, pHitMask, lHitmask) # 若uCollide或者lCollide为真,则为碰撞 if uCollide or lCollide: return True return False def pixelCollision(rect1, rect2, hitmask1, hitmask2): rect = rect1.clip(rect2) # 判断是否传入准确数据 if rect.width == 0 or rect.height == 0: return False # 判断两个边界是否有碰撞 x1, y1 = rect.x - rect1.x, rect.y - rect1.y x2, y2 = rect.x - rect2.x, rect.y - rect2.y for x in range(rect.width): for y in range(rect.height): if hitmask1[x1+x][y1+y] and hitmask2[x2+x][y2+y]: return True return False class GameState: # 初始化游戏状态 def __init__(self): # 初始化分数,index与迭代次数均为0 self.score = 0 self.playerIndex = 0 self.loopIter = 0 # 初始化玩家坐标,每次重新生成的坐标均为固定值 self.playerx = int(SCREENWIDTH * 0.2) self.playery = int((SCREENHEIGHT - PLAYER_HEIGHT) / 2) # 初始化基础背景的横坐标 self.basex = 0 self.baseShift = IMAGES['base'].get_width() - BACKGROUND_WIDTH # 随机生成两个管道 newPipe1 = getRandomPipe() newPipe2 = getRandomPipe() # 设置上、下管道的坐标 self.upperPipes = [ {'x': SCREENWIDTH, 'y': newPipe1[0]['y']}, {'x': SCREENWIDTH + (SCREENWIDTH / 2), 'y': newPipe2[0]['y']}, ] self.lowerPipes = [ {'x': SCREENWIDTH, 'y': newPipe1[1]['y']}, {'x': SCREENWIDTH + (SCREENWIDTH / 2), 'y': newPipe2[1]['y']}, ] # 设置一些基本量,包括玩家速度、最大速度,下降加速度以及上升加速度 # 注意向下速度为正 # 游戏屏幕横移速度 self.pipeVelX = -4 # 初始速度 self.playerVelY = 0 # 下降最大速度 self.playerMaxVelY = 10 # 上升最大速度 self.playerMinVelY = -8 # 自然下降的加速度 self.playerAccY = 1 # 上升加速度 self.playerFlapAcc = -9 # 判断是否摆动翅膀(flap) self.playerFlapped = False # 设置进行一步游戏,与gym库中的step作用相似 def frame_step(self, input_actions): pygame.event.pump() # 每一帧的基础奖励为0.1 reward = 0.1 # 游戏终止状态设置为False terminal = False # 输入应符合游戏标准,不能一次输入多个动作 if sum(input_actions) != 1: raise ValueError('Multiple input actions!') # input_actions[0] == 1: 什么都不做 # input_actions[1] == 1: flap if input_actions[1] == 1: # 小鸟的位置不能超出边界 if self.playery > -2 * PLAYER_HEIGHT: self.playerVelY = self.playerFlapAcc self.playerFlapped = True # 检查得分情况 playerMidPos = self.playerx + PLAYER_WIDTH / 2 for pipe in self.upperPipes: # 判断小鸟是否通过管道 pipeMidPos = pipe['x'] + PIPE_WIDTH / 2 # 若通过管道,则额外获得1奖励 if pipeMidPos <= playerMidPos < pipeMidPos + 4: self.score += 1 # SOUNDS['point'].play() reward = 1 # 小鸟的坐标变化 if (self.loopIter + 1) % 3 == 0: self.playerIndex = next(PLAYER_INDEX_GEN) self.loopIter = (self.loopIter + 1) % 30 # 基础背景横坐标的变化 self.basex = -((-self.basex + 100) % self.baseShift) # 玩家的动作 if self.playerVelY < self.playerMaxVelY and not self.playerFlapped: self.playerVelY += self.playerAccY if self.playerFlapped: self.playerFlapped = False self.playery += min(self.playerVelY, BASEY - self.playery - PLAYER_HEIGHT) if self.playery < 0: self.playery = 0 # 使游戏屏幕左移 for uPipe, lPipe in zip(self.upperPipes, self.lowerPipes): uPipe['x'] += self.pipeVelX lPipe['x'] += self.pipeVelX # 增加新的管道障碍 if 0 < self.upperPipes[0]['x'] < 5: newPipe = getRandomPipe() self.upperPipes.append(newPipe[0]) self.lowerPipes.append(newPipe[1]) # 假如最左边的管道出了屏幕,则移除 if self.upperPipes[0]['x'] < -PIPE_WIDTH: self.upperPipes.pop(0) self.lowerPipes.pop(0) # 检查是否碰撞 isCrash= checkCrash({'x': self.playerx, 'y': self.playery, 'index': self.playerIndex}, self.upperPipes, self.lowerPipes) # 假如撞到管道 if isCrash: #SOUNDS['hit'].play() #SOUNDS['die'].play() # 终止游戏 terminal = True #重新初始化 self.__init__() reward = -1 # 渲染背景 SCREEN.blit(IMAGES['background'], (0,0)) for uPipe, lPipe in zip(self.upperPipes, self.lowerPipes): SCREEN.blit(IMAGES['pipe'][0], (uPipe['x'], uPipe['y'])) SCREEN.blit(IMAGES['pipe'][1], (lPipe['x'], lPipe['y'])) SCREEN.blit(IMAGES['base'], (self.basex, BASEY)) SCREEN.blit(IMAGES['player'][self.playerIndex], (self.playerx, self.playery)) # 更新游戏画面 image_data = pygame.surfarray.array3d(pygame.display.get_surface()) pygame.display.update() FPSCLOCK.tick(FPS) return image_data, reward, terminal # 游戏名 GAME = 'flappy bird' # 有效动作数目 ACTIONS = 2 # 折扣因子 GAMMA = 0.99 # 训练前观察的步长 OBSERVE = 100. # 随机探索的时间 EXPLORE = 3.0e6 # 最终的探索率 FINAL_EPSILON = 1.0e-4 # 初始探索率 INITIAL_EPSILON = 0.1 # 经验池的大小 REPLAY_MEMORY = 50000 # batch的大小 BATCH = 32 # 跳帧 FRAME_PER_ACTION = 1 class Experience_Buffer(): # 初始化一个经验回放池,包括一个列表和最大容纳量 def __init__(self,buffer_size = REPLAY_MEMORY): # 用来存放采样的数据 self.buffer = [] # 设置可以存放的数据条数 self.buffer_size = buffer_size # 将采样后的数据添加到经验池中,定义添加规则为先进先出 def add_experience(self, experience): # 将一条数据添加到经验池中,若超过最大容量,则更新掉最旧的采样信息 if len(self.buffer)+len(experience) >= self.buffer_size: self.buffer[0:len(self.buffer)+len(experience)-self.buffer_size]=[] # 若小于最大容量,则将该条数据直接添加到经验池最后 self.buffer.extend(experience) # 采样函数,定义采样规则 def sample(self,samples_num): # 随机采样 sample_data = random.sample(self.buffer, samples_num) # 获取采样数据,包括当前状态s,采取的动作a,获得的奖励r,下一状态s_,是否为终止状态 train_s = [d[0] for d in sample_data ] train_a = [d[1] for d in sample_data] train_r = [d[2] for d in sample_data] train_s_=[d[3] for d in sample_data] train_terminal = [d[4] for d in sample_data] return train_s, train_a, train_r,train_s_,train_terminal class Deep_Q_N(): # 初始化网络,设置网络参数以及其它常量 def __init__(self, lr=1.0e-6, model_file=None): # 设置折扣因子 self.gamma = GAMMA # 设置更新目标网络参数的步长 self.tau = 0.01 # 创建会话 self.sess = tf.compat.v1.Session() # 设置学习率 self.learning_rate = lr # 输入层 # 分别定义表现网络、目标网络的输入和输出 self.obs = tf.compat.v1.placeholder(tf.float32, shape=[None, 80, 80, 4]) self.obs_ = tf.compat.v1.placeholder(tf.float32, shape=[None, 80, 80, 4]) self.action = tf.compat.v1.placeholder(tf.float32, shape=[None, ACTIONS]) self.action_ = tf.compat.v1.placeholder(tf.float32, shape=[None, ACTIONS]) # 创建表现网络 self.Q = self.build_q_net(self.obs, scope='eval', trainable=True) # 创建目标网络 self.Q_ = self.build_q_net(self.obs_, scope='target', trainable=False) # 分离两套网络参数 self.qe_params = tf.compat.v1.get_collection(tf.compat.v1.GraphKeys.GLOBAL_VARIABLES, scope='eval') self.qt_params = tf.compat.v1.get_collection(tf.compat.v1.GraphKeys.GLOBAL_VARIABLES, scope='target') # 定义新旧参数的替换操作 self.update_oldq_op = [oldq.assign((1 - self.tau) * oldq + self.tau * p) for p, oldq in zip(self.qe_params, self.qt_params)] # 构建损失函数 self.Q_target = tf.compat.v1.placeholder(tf.float32, [None]) readout_q = tf.reduce_sum(tf.multiply(self.Q, self.action), axis=[1]) self.q_loss = tf.losses.mean_squared_error(self.Q_target, readout_q) # 定义优化器,采用Adam方法,学习率为1.0e-6 self.q_train_op = tf.compat.v1.train.AdamOptimizer(lr).minimize(self.q_loss, var_list=self.qe_params) # 初始化图中的变量 self.sess.run(tf.compat.v1.global_variables_initializer()) # 6.定义保存和读取模型 self.saver = tf.compat.v1.train.Saver() if model_file is not None: self.restore_model(model_file) # 定义存储模型函数 def save_model(self, model_path, global_step): self.saver.save(self.sess, model_path, global_step=global_step) # 定义读取模型函数 def restore_model(self, model_path): self.saver.restore(self.sess, model_path) # 建立表现网络 def build_q_net(self, obs, scope, trainable): with tf.compat.v1.variable_scope(scope, reuse=tf.compat.v1.AUTO_REUSE): # 卷积层,32个8×8卷积,步长为4,全零填充,激活函数为ReLU h_conv1 = tf.keras.layers.Conv2D(filters=32, kernel_size=[8, 8], strides=4, padding="same", activation=tf.nn.relu, kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.01), bias_initializer=tf.constant_initializer(0.01), trainable=trainable)(obs) # 池化层,最大池化,窗口大小为2×2,步长为2 h_pool1 = tf.keras.layers.MaxPooling2D(pool_size=[2, 2], strides=2, padding="SAME")(h_conv1) # 卷积层,64个4×4卷积,步长为2,全零填充,激活函数为ReLU h_conv2 = tf.keras.layers.Conv2D(filters=64, kernel_size=[4, 4], strides=2, padding="same", activation=tf.nn.relu, kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.01), bias_initializer=tf.constant_initializer(0.01), trainable=trainable)( h_pool1) # 卷积层,64个3×3卷积,步长为1,全零填充,激活函数为ReLU h_conv3 = tf.keras.layers.Conv2D(filters=64, kernel_size=[3, 3], strides=1, padding="same", activation=tf.nn.relu, kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.01), bias_initializer=tf.constant_initializer(0.01), trainable=trainable)( h_conv2) # 扁平化 h_conv3_flat = tf.keras.layers.Flatten()(h_conv3) # 全连接层,512个神经元,激活函数为ReLU h_fc1 = tf.keras.layers.Dense(units=512, activation=tf.nn.relu, kernel_initializer=tf.random_normal_initializer(0, stddev=0.01), bias_initializer=tf.constant_initializer(0.01), trainable=trainable)( h_conv3_flat) # 输出层,2个神经元,表示两个动作分别对应的预测Q值,没有激活函数 qout = tf.keras.layers.Dense(units=2, kernel_initializer=tf.random_normal_initializer(0, stddev=0.01), bias_initializer=tf.constant_initializer(0.01), trainable=trainable)(h_fc1) return qout # 采用ε-greedy策略来进行采样 def epsilon_greedy(self, s_t, epsilon): a_t = np.zeros([ACTIONS]) # 获得最大Q值对应的动作 amax = np.argmax(self.sess.run(self.Q, {self.obs: [s_t]})[0]) # 判断执行贪婪策略还是进行探索 if np.random.uniform() < 1 - epsilon: # 执行贪婪策略 a_t[amax] = 1 else: # 进行探索 a_t[random.randrange(ACTIONS)] = 1 return a_t # 训练网络 def train_Network(self, experience_buffer): # 打开游戏状态与模拟器进行通信 game_state = GameState() # 获得第一个状态 do_nothing = np.zeros(ACTIONS) # 初始动作 do_nothing[0] = 1 # 与游戏交互一次,并将图像进行预处理 x_t, r_0, terminal = game_state.frame_step(do_nothing) x_t = cv2.cvtColor(cv2.resize(x_t, (80, 80)), cv2.COLOR_BGR2GRAY) ret, x_t = cv2.threshold(x_t, 1, 255, cv2.THRESH_BINARY) s_t = np.stack((x_t, x_t, x_t, x_t), axis=2) # 开始训练 epsilon = INITIAL_EPSILON t = 0 # 由于训练时间较长,这里只展现前10000轮训练过程 while t <= 10000: # 采取ε-greedy策略来进行动作的选取 a_t = self.epsilon_greedy(s_t, epsilon=epsilon) # ε递减,要求探索率是不断衰减地来保证最后可以收敛到一个确定的理想状态 if epsilon > FINAL_EPSILON and t > OBSERVE: epsilon -= (INITIAL_EPSILON - FINAL_EPSILON) / EXPLORE # 执行动作,与游戏环境交互一次,并获得返回值 x_t1_colored, r_t, terminal = game_state.frame_step(a_t) x_t1 = cv2.cvtColor(cv2.resize(x_t1_colored, (80, 80)), cv2.COLOR_BGR2GRAY) ret, x_t1 = cv2.threshold(x_t1, 1, 255, cv2.THRESH_BINARY) x_t1 = np.reshape(x_t1, (80, 80, 1)) s_t1 = np.append(x_t1, s_t[:, :, :3], axis=2) # 将数据存储到经验池中 experience = np.reshape(np.array([s_t, a_t, r_t, s_t1, terminal]), [1, 5]) experience_buffer.add_experience(experience) # 进行训练 if t > OBSERVE: # 由经验池中采集样本,获取信息 train_s, train_a, train_r, train_s_, train_terminal = experience_buffer.sample(BATCH) target_q = [] # 运行目标网络 read_target_Q = self.sess.run(self.Q_, {self.obs_: train_s_}) for i in range(len(train_r)): # 判断是否为终止状态,若是则直接获得累积奖励 if train_terminal[i]: target_q.append(train_r[i]) # 否则需要计算下一状态的最大Q值并添加到累积奖励中 else: target_q.append(train_r[i] + GAMMA * np.max(read_target_Q[i])) # 训练一次 self.sess.run(self.q_train_op, feed_dict={self.obs: train_s, self.action: train_a, self.Q_target: target_q}) # 更新旧的目标网络 self.sess.run(self.update_oldq_op) # 往前推进一步 s_t = s_t1 t += 1 # 每10000次迭代保存一次 if t % 10000 == 0: self.save_model('saved_networks/', global_step=t) else: if t % 1000 == 0: # 打印迭代轮数,探索率,动作和奖励 print("train, steps", t, "/epsilon", epsilon, "/action_index", a_t, "/reward", r_t) # 使用GPU进行训练 import os os.environ['CUDA_VISIBLE_DEVICES'] = '0' if __name__=="__main__": # 实例化经验池 buffer = Experience_Buffer() # 实例化深度Q网络 brain= Deep_Q_N() # 对于网络进行训练 brain.train_Network(buffer)

图片加载: