这个去雾算法是做一个图像识别分类项目中使用的,用来作图像的预处理,尤其是对于图像的特征被雾遮挡住的情况。
github链接:https://github.com/x2mercy/scene_recognition
暗通道算法——何凯明博士
1:去雾
import cv2 import numpy as np def zmMinFilterGray(src, r=7): if r <= 0: return src h, w = src.shape[:2] I = src res = np.minimum(I , I[[0]+range(h-1) , :]) res = np.minimum(res, I[range(1,h)+[h-1], :]) I = res res = np.minimum(I , I[:, [0]+range(w-1)]) res = np.minimum(res, I[:, range(1,w)+[w-1]]) return zmMinFilterGray(res, r-1) def guidedfilter(I, p, r, eps): height, width = I.shape m_I = cv2.boxFilter(I, -1, (r,r)) m_p = cv2.boxFilter(p, -1, (r,r)) m_Ip = cv2.boxFilter(I*p, -1, (r,r)) cov_Ip = m_Ip-m_I*m_p m_II = cv2.boxFilter(I*I, -1, (r,r)) var_I = m_II-m_I*m_I a = cov_Ip/(var_I+eps) b = m_p-a*m_I m_a = cv2.boxFilter(a, -1, (r,r)) m_b = cv2.boxFilter(b, -1, (r,r)) return m_a*I+m_b def getV1(m, r, eps, w, maxV1): #input rgb image, the range of value [0,1] V1 = np.min(m,2) #get dark path image V1 = guidedfilter(V1, zmMinFilterGray(V1,7), r, eps) #guided filter bins = 2000 ht = np.histogram(V1, bins) #calculate light of atmosphere:A d = np.cumsum(ht[0])/float(V1.size) for lmax in range(bins-1, 0, -1): if d[lmax]<=0.999: break A = np.mean(m,2)[V1>=ht[1][lmax]].max() V1 = np.minimum(V1*w, maxV1) #limit the range return V1,A def deHaze(m, r=81, eps=0.001, w=0.95, maxV1=0.80, bGamma=False): Y = np.zeros(m.shape) V1,A = getV1(m, r, eps, w, maxV1) #get shaded image and light for k in range(3): Y[:,:,k] = (m[:,:,k]-V1)/(1-V1/A) #correct color Y = np.clip(Y, 0, 1) if bGamma: Y = Y**(np.log(0.5)/np.log(Y.mean())) #correct gamma return Y if __name__ == '__main__': m = deHaze(cv2.imread('/Users/wangmengxi/Documents/mercy/ec601/pj1/image processing/boston-fog.jpg')/255.0)*255 cv2.imwrite('boston-defog.jpg', m)
首先,要安装opencv,安装方法:https://github.com/opencv/opencv (推荐homebrew方法安装)
我的环境:Python2.7(表白anaconda)
使用方法:直接把main里面的imread内容换成需要去雾的图像,然后换一下imwrite的图像保存路径
结果:


2:特征提取
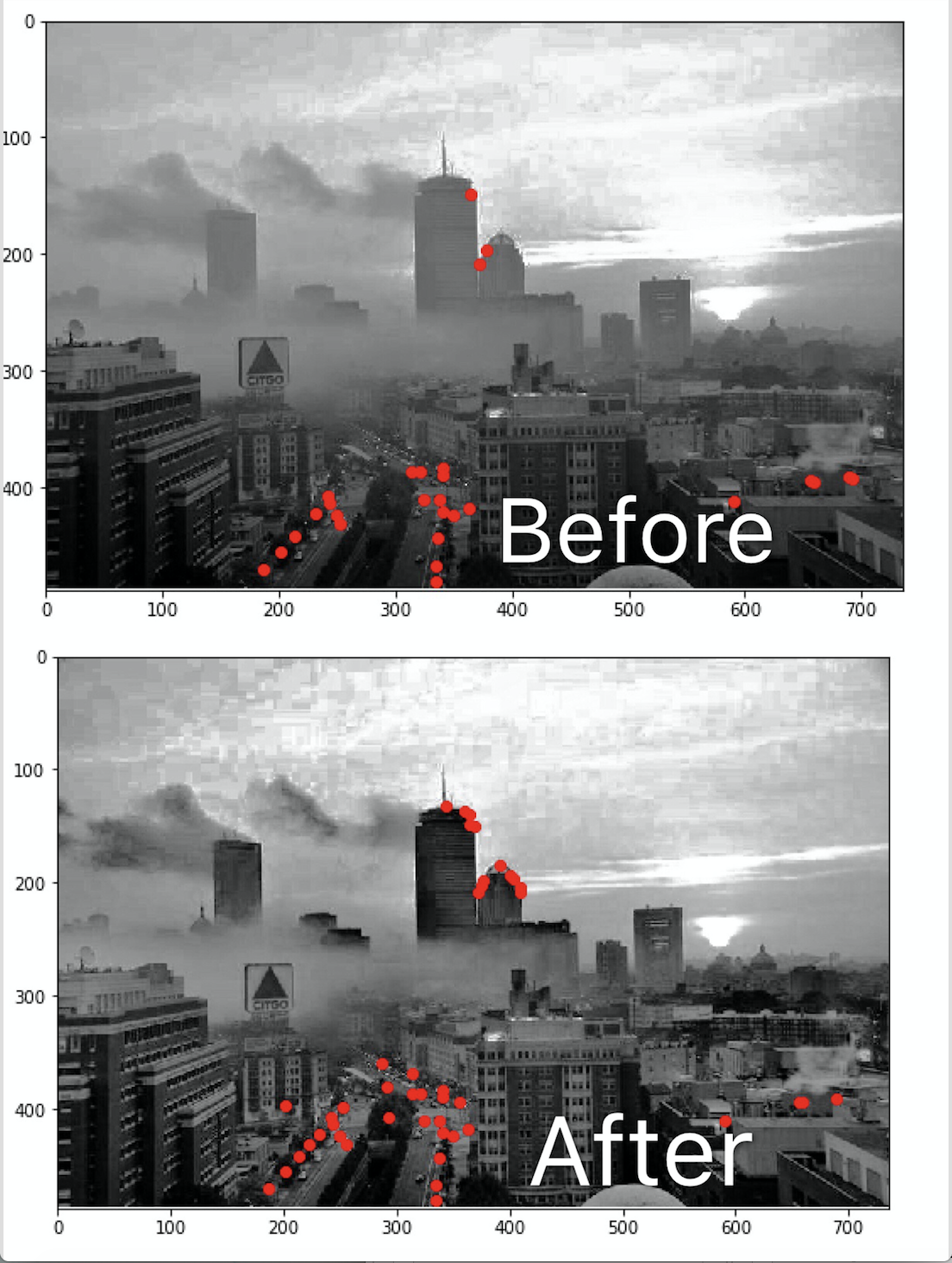
这里使用特征提取是为了证明,图像中的建筑被雾遮住的特点在去雾之后显现出来(并没有改变建筑原本的特征)
方法:检测Harris cornor
工具:OpenCV
代码:
#%matplotlib inline import numpy as np from skimage.feature import corner_harris,corner_peaks from skimage.color import rgb2gray import matplotlib.pyplot as plt import skimage.io as io from skimage.exposure import equalize_hist def show_corners(corners,image): fig=plt.figure() plt.gray() plt.imshow(image) y_corner,x_corner=zip(*corners) plt.plot(x_corner,y_corner,'or') plt.xlim(0,image.shape[1]) plt.ylim(image.shape[0],0) fig.set_size_inches(np.array(fig.get_size_inches())*1.5) plt.show() if __name__ == '__main__': mandrill=io.imread('/Users/wangmengxi/Documents/mercy/ec601/pj1/image processing/defog1.jpg') mandrill=equalize_hist(rgb2gray(mandrill)) corners=corner_peaks(corner_harris(mandrill),min_distance=2) show_corners(corners,mandrill)
结果: