- 1、3D激光SLAM
- 1.1、基于Point to Plane ICP的帧间匹配
- 1.2、基于3D描述子ICP的帧间匹配
- 1.3、基于NDT的帧间匹配
- 2、LOAM
- 2.1、里程计
- 2.1.1 特征点检测
- 2.1.2 特征点匹配
- 2.1.3 运动估计
- 2.2 建图
1、3D激光SLAM
2D激光SLAM三个自由度(x、y、theta),3D激光雷达6DoF。
3D地图
2D激光SLAM 3D激光SLAM
单线激光雷达 多线激光雷达(300线激光雷达和depth相机一样了)
二维栅格地图 三维点云地图或者三维栅格地图
室内移动机器人 室外移动机器人
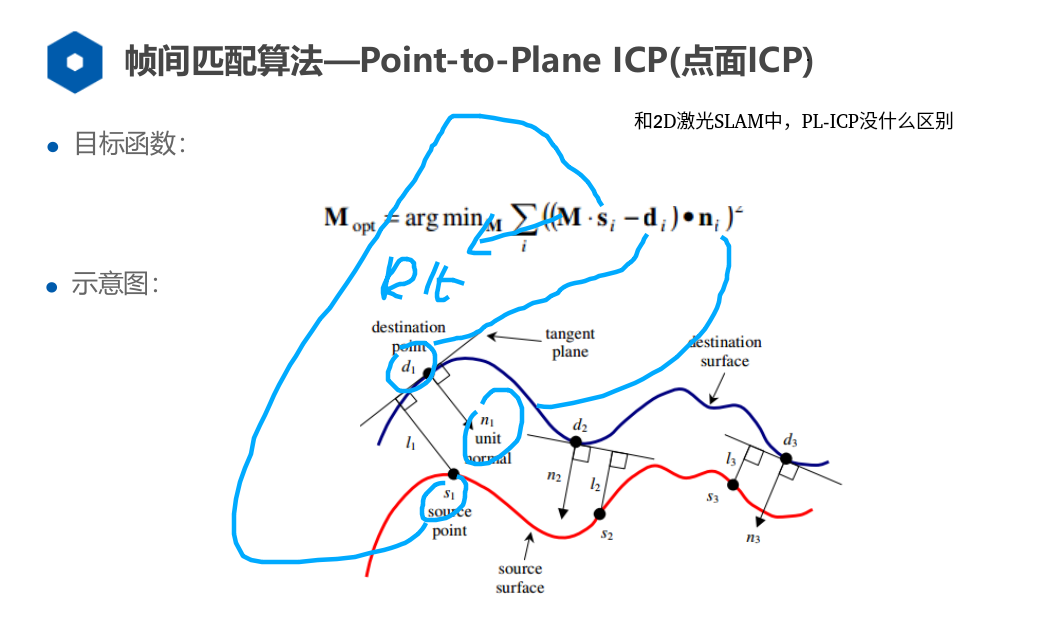
1.1、基于Point to Plane ICP的帧间匹配
3D 激光SLAM中,回环、前端都是帧间匹配,常用的例如:point to plane点面距离:
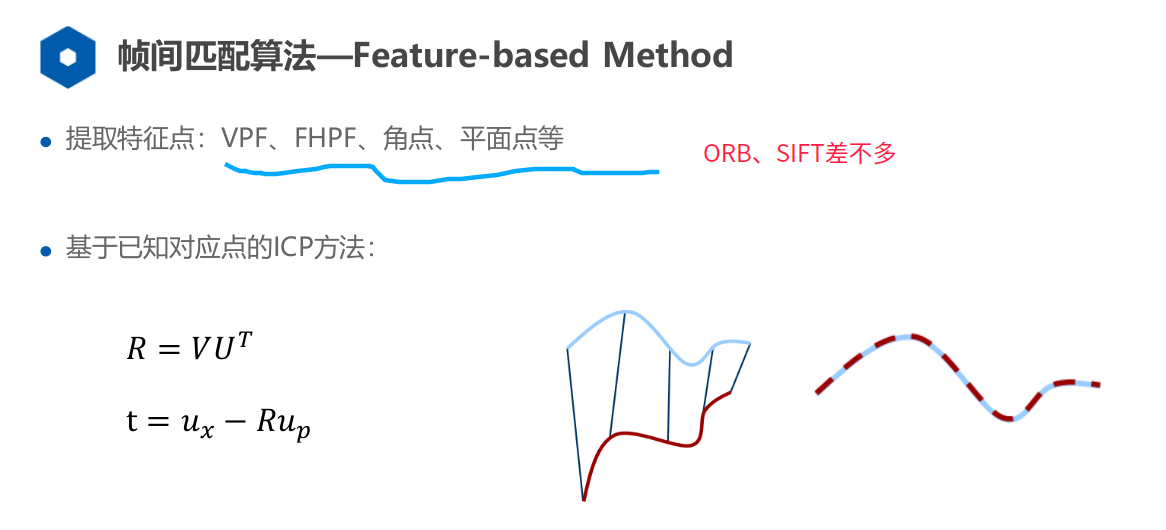
1.2、基于3D描述子ICP的帧间匹配
和视觉提取特征点类似 ,这里是已经对应点的ICP匹配问题,比较简单。
1.3、基于NDT的帧间匹配
下图中,步骤1、2就是NDT算法核心了。
- 步骤1中,将点云空间划分出多个方格。
- 步骤2中,利用观测值xi计算二维高斯分布协方差矩阵、期望值。
- 步骤3中,将预测值(和VSLAM一样)代入高斯分布中,经过归一化打分。
- 步骤4为一帧激光数据的目标函数。
NDT算法和似然场差不多,只不过NDT中的Gaussian分布是连续的,似然长是离散的(必要的时候,需要插值)。

NDT也不需要搜索,因为目标函数是连续的。好的SLAM算法更加依赖于公式,公式是重要,但在工程化过程中,实践技巧更加重要。以上三种算法在PCL中都有实现。
3D激光雷达中,里程计、回环本质都是帧间匹配,后端都是一个套路。和VSLAM比起来,激光SLAM精度相当高,例如:双目SLAM中,点匹配差一个像素,深度误差达到8cm。所以,在小场景,激光SLAM不做回环,大场景还是要做。
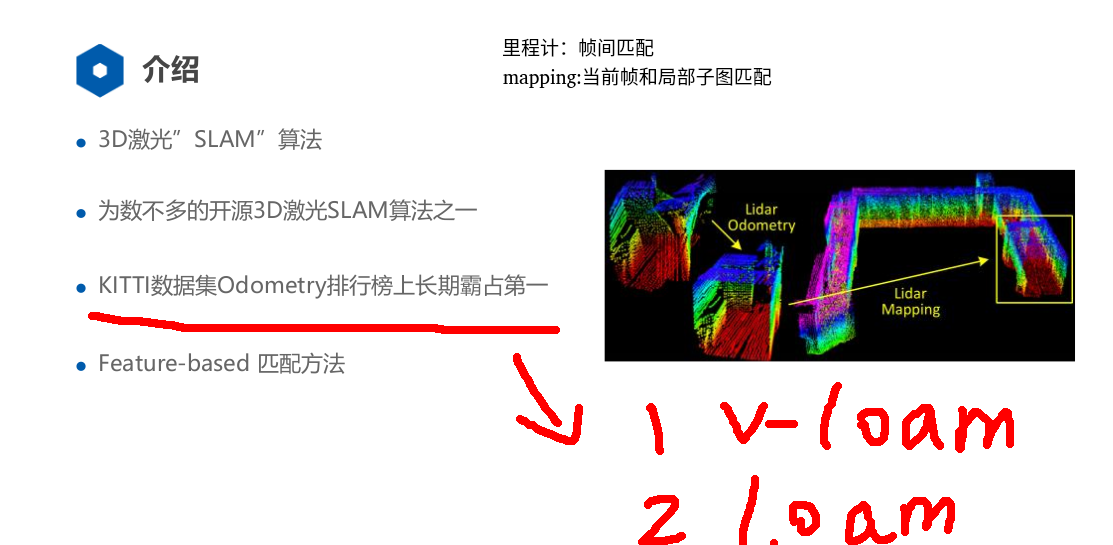
2、loam
loam没有回环,主要包含两个部分:里程计+mapping;主要是提取特征点。
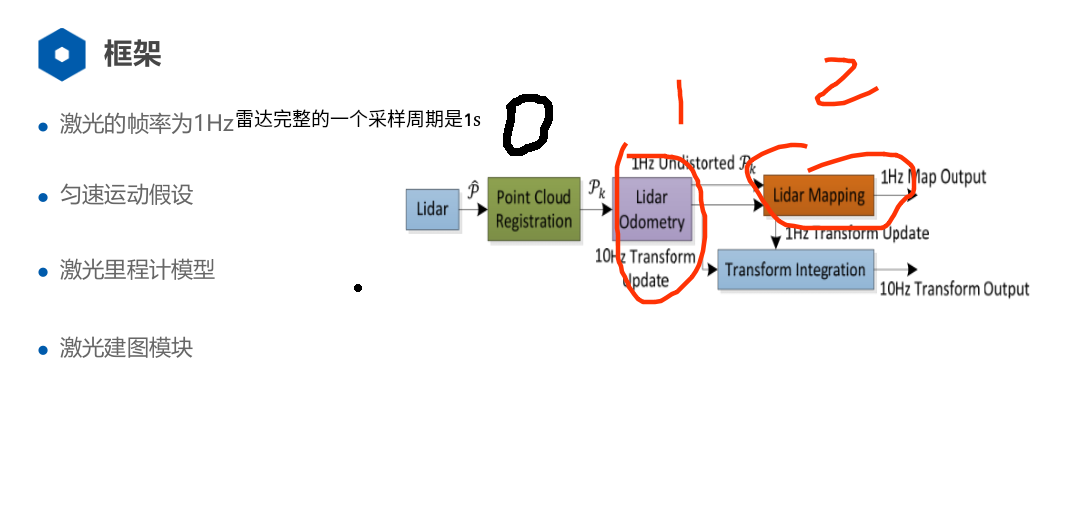
如下是框架图:1、2没啥好说了。0处的点云注册是啥意思?首先,一帧完整的激光点云数据包含多个scan,例如:16线激光雷达就对应16个scan,下图中 Point Cloud Registeration 表示将多个scan拼接到一起的过程(2D 激光SLAM依靠电机,雷达绑到步进电机上,所以角度是知道的),然后给Lidar Odometry。后面位姿集成,没看懂。
激光里程计输出的1Hz、10Hz是怎么计算输出的?
2.1、里程计
2.1.1 特征点检测
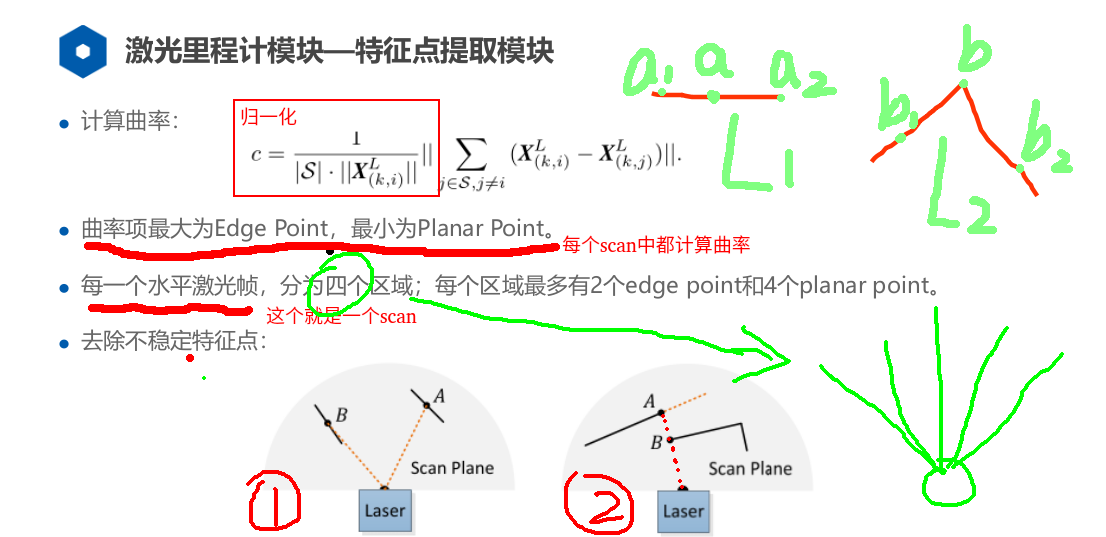
如下图,这里曲率计算公式如下图,思想和我所理解的不一样。如下图,直线L1、L2,向量aa1 - 向量aa2 = 0向量,而向量bb1 - 向量bb2很大,理论上夹角越小,得到的至越大,曲率越大。
一个水平激光帧对应一个scan,一个scan分为四个区域,分别提取特征点,我猜目的就是为了就是让特征不那么集中。
去除不稳定特征点:如下图1,B点,如果激光束再偏一点点,B点就没了;如下图2,A点是边缘特征点,但是如果激光雷达再向左边平移一点点,A点就成了平面点。
2.1.2 特征点匹配
tk -> tk+1才是一个完整的扫描周期。特征点检测上一节已经讲解,这里说下如何匹配的。
边缘特征点的匹配:如下图,当前帧点云橙色,投影(依据什么投影的?ICP?)到参考帧点云中,例如:对于当前帧边缘点j,在参考帧中找一次近边缘点l(note:这两点必定不在同一个scan序列中,最近边缘点是当期帧的点i),所以特征匹配目标函数就是最小化:点i到直线lj的距离。
平面特征点的匹配:同理。


特征点无脑匹配,很简单,总共的点也不多(需要最小化误差函数,才能求解出粗略位姿)。
2.1.3 运动估计
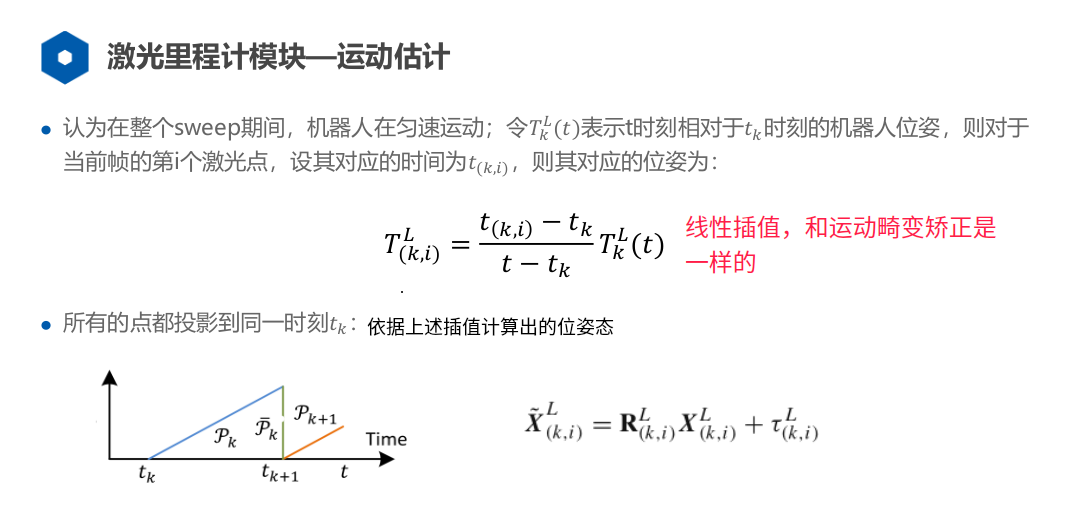
构建目标函数,LM算法优化。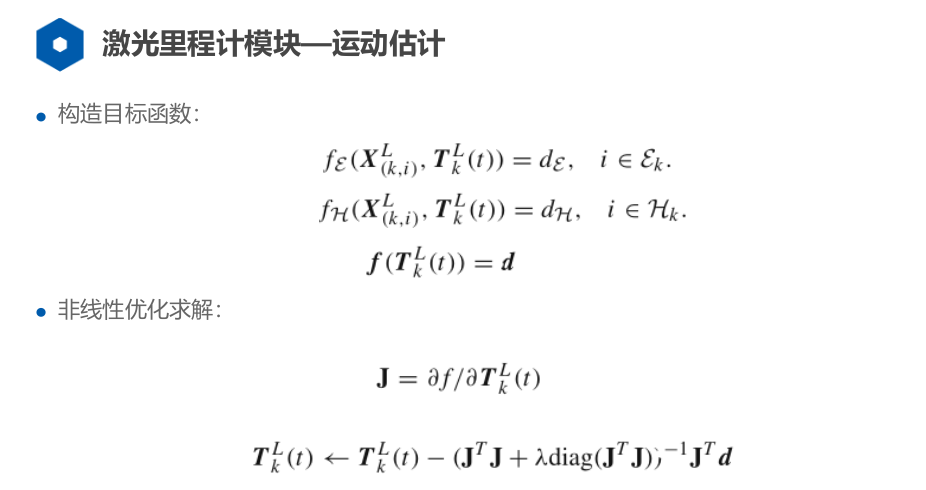
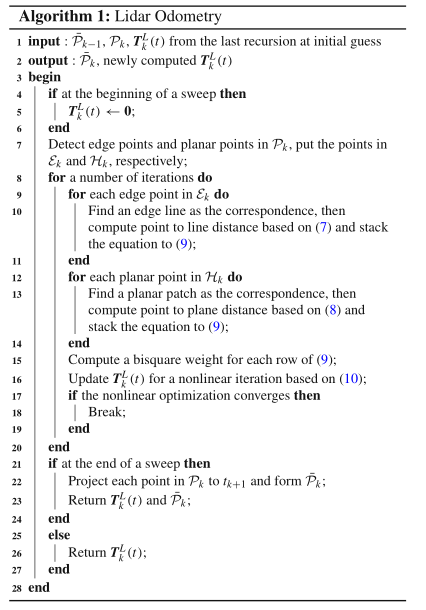
对前面三个小结进行总结(其中不懂的变量,可对比上图进行对比观看):
- 特征点检测
- 寻找匹配点
- 构建非线性方程组
- 求解非线性方程组
- 如果到了当前帧的末尾,则投影到当前帧的时刻,开始进行下一帧的求解(这一句你好好理解!!!!!!)
上图变量不懂,可以看下图
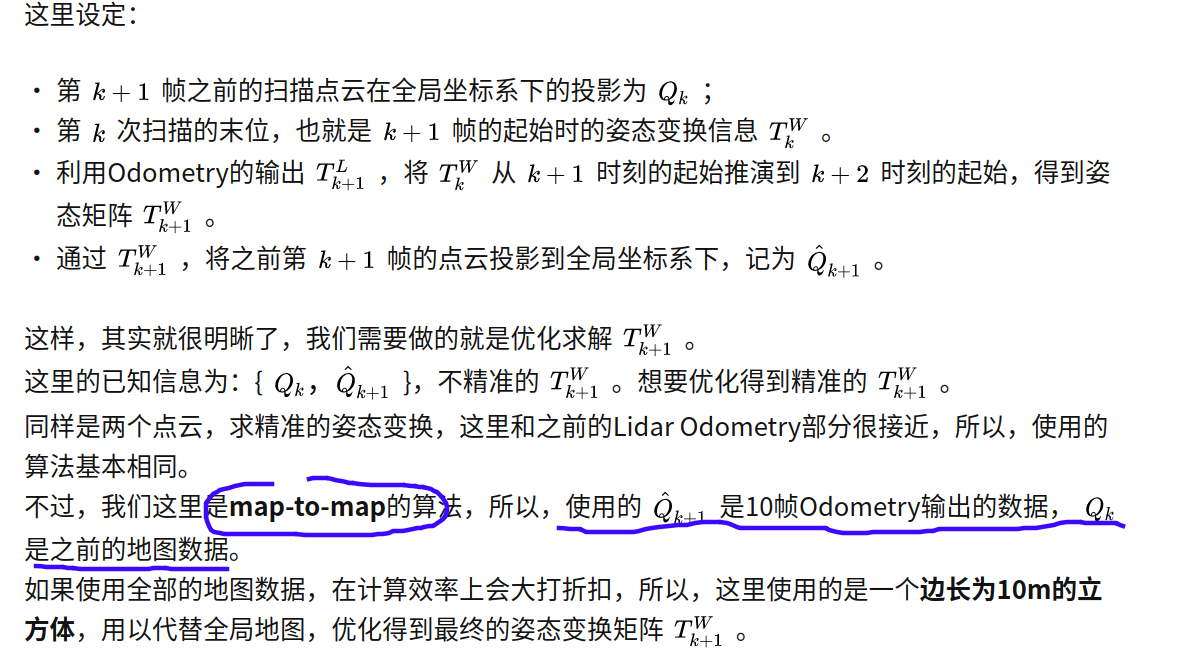
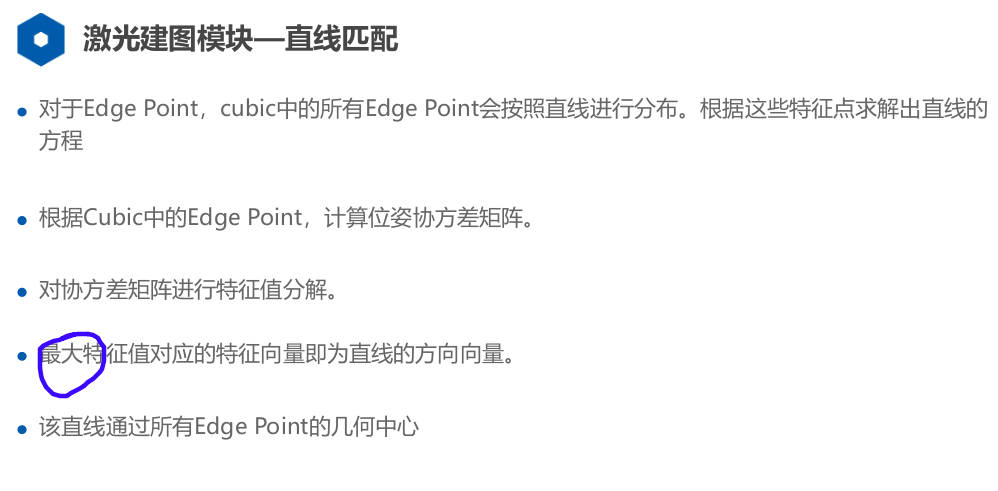
2.2 建图
Qk一横(你懂得) 表示完整的,去除了运动几遍的sweep,其与局部子图Qk-1进行匹配,得到位姿得到Tk(如下图)。

参考:https://zhuanlan.zhihu.com/p/111388877
至少到现在,应该直到 scan to scan 和 map to map的区别了
这里有个cubic的限制,其目的在于:多找几个边缘点,方便后续作基于SVD的3D直线拟合(这玩意我以前是做过的,不多BB),下面链接有个动态图,很好说明了SVD中最大奇异值对应的右奇异矩阵第一列就是:这堆3D点的方向向量。
链接:https://zhuanlan.zhihu.com/p/111388877
对于点-平面匹配,原理一样。

不同于里程计,mapping这里在计算直线、平面方程的时候,采取的点数量更多。
