原文转自:https://www.cnblogs.com/lfri/p/10599420.html
使用自定义内核对图像进行卷积。该功能将任意线性滤波器应用于图像。支持就地操作。当光圈部分位于图像外部时,该功能会根据指定的边框模式插入异常像素值。
语法
函数原型:
dst=cv.filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]])
参数:
| 参数 | 描述 |
| src | 原图像 |
| dst | 目标图像,与原图像尺寸和通过数相同 |
| ddepth | 目标图像的所需深度 |
| kernel | 卷积核(或相当于相关核),单通道浮点矩阵;如果要将不同的内核应用于不同的通道,请使用拆分将图像拆分为单独的颜色平面,然后单独处理它们。 |
| anchor | 内核的锚点,指示内核中过滤点的相对位置;锚应位于内核中;默认值(-1,-1)表示锚位于内核中心。 |
| detal | 在将它们存储在dst中之前,将可选值添加到已过滤的像素中。类似于偏置。 |
| borderType | 像素外推法,参见BorderTypes |
该函数实际计算的是相关性,而不是卷积
在内核足够大(~11x11或者更大)的时候,该函数使用DFT算法,对于小内核则直接计算。
也可见,anchor相当于坐标轴平移。
其中ddepth表示目标图像的所需深度,它包含有关图像中存储的数据类型的信息,可以是unsigned char(CV_8U),signed char(CV_8S),unsigned short(CV_16U)等等...
| Input depth (src.depth()) | Output depth (ddepth) |
|---|---|
| CV_8U | -1/CV_16S/CV_32F/CV_64F |
| CV_16U/CV_16S | -1/CV_32F/CV_64F |
| CV_32F | -1/CV_32F/CV_64F |
| CV_64F | -1/CV_64F |
Note:当ddepth=-1时,表示输出图像与原图像有相同的深度。
例子
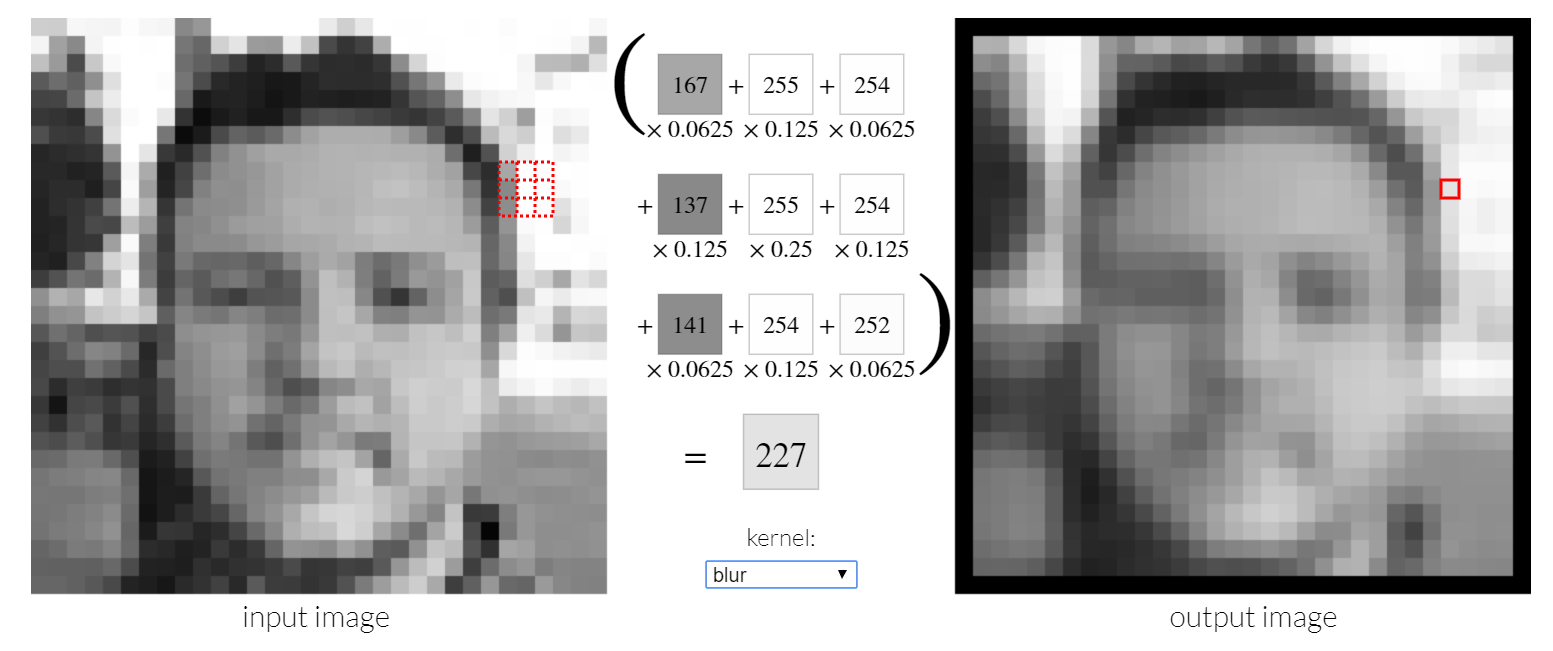
图像内核是一个小矩阵,用于应用您可能在Photoshop或Gimp中找到的效果,例如模糊,锐化,轮廓或浮雕。它们还用于机器学习中的“特征提取”,这是一种用于确定图像最重要部分的技术。在这种情况下,该过程更普遍地称为“卷积”(参见:卷积神经网络)。
有许多有趣的内核,下面一一介绍:
1、模糊(blur)
模糊内核消除了相邻像素值之间的差异。内核如下:
| 0.0625 | 0.125 | 0.0625 |
| 0.125 | 0.25 | 0.125 |
| 0.0625 | 0.125 | 0.125 |
代码:

import cv2
import numpy as np
def solve():
src = cv2.imread("./Pictures/car001.jpg")
if src is None:
return -1
kernel = np.array((
[0.0625, 0.125, 0.0625],
[0.125, 0.25, 0.125],
[0.0625, 0.125, 0.0625]), dtype="float32")
dst = cv2.filter2D(src, -1, kernel)
htich = np.hstack((src, dst))
cv2.imwrite("./Pictures/car.jpg", htich)
cv2.imshow('merged_img', htich)
cv2.waitKey(0)
return 0
if __name__ == "__main__":
solve()
效果:
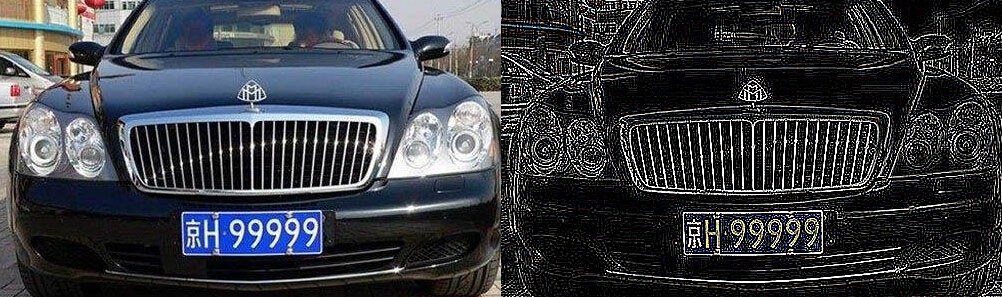
2、索贝尔(sobel)
sobel内核用于仅显示特定方向上相邻像素值的差异,分为left sobel、right sobel(检测梯度的水平变化)、top sobel、buttom sobel(检测梯度的垂直变化)。
例如,buttom sobel
| -1 | -2 | -1 |
| 0 | 0 | 0 |
| 1 | 2 | 1 |
代码与上面类似,只需修改krenel的值。

3、浮雕(emboss)
通过强调像素的差在给定方向的Givens深度的错觉。在这种情况下,沿着从左上到右下的直线的方向。
| -2 | -1 | 0 |
| -1 | 1 | 1 |
| 0 | 1 | 2 |
效果:

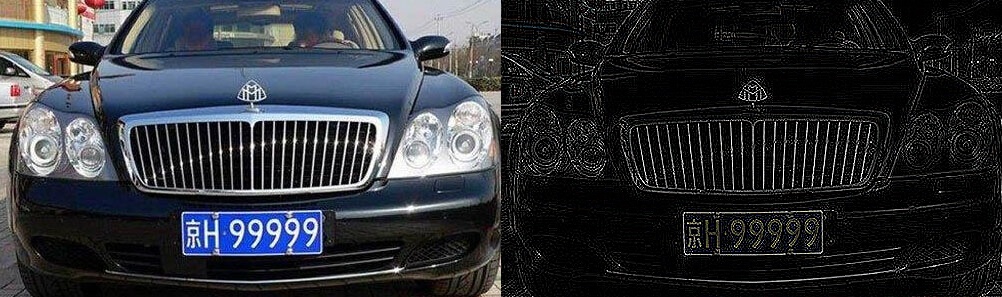
4、大纲(outline)
一个轮廓内核(也称为“边缘”的内核)用于突出显示的像素值大的差异。具有接近相同强度的相邻像素旁边的像素在新图像中将显示为黑色,而与强烈不同的相邻像素相邻的像素将显示为白色。
| -1 | -1 | -1 |
| -1 | 8 | -1 |
| -1 | -1 | -1 |
效果:

5、锐化(sharpen)
该锐化内核强调在相邻的像素值的差异。这使图像看起来更生动。
| 0 | -1 | 0 |
| -1 | 5 | -1 |
| 0 | -1 | 0 |
效果:

6、拉普拉斯算子(laplacian operator)
拉普拉斯算子可以用于边缘检测,对于检测图像中的模糊也非常有用。
| 0 | 1 | 0 |
| 1 | -4 | 1 |
| 0 | 1 | 0 |
效果:
7、分身(identity)
这个非常简单,就是原图(不考虑边界时),How boring!
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 0 | 0 | 0 |
拓展部分
正如您在本博文中所收集的那样,我们必须 手动定义每个内核以应用各种操作,例如平滑,锐化和边缘检测。
如何定义内核达到你想要的效果,这并不是一件简单的事情。
现在有一种神经网络——CNN,通过应用卷积滤波器,非线性激活函数,汇集和反向传播,CNN能够学习过滤器(的权重),可以检测网络较低层中的边缘和类似blob的结构 - 然后使用边缘和结构作为构建块,最终在网络的更深层中检测更高级别的对象(即,面部,猫,狗,杯等)。这样就不必手动定义过滤器了。