论文:《Memory-based Graph Networks》,ICLR2020
代码:https://github.com/amirkhas/GraphMemoryNet
概述
图神经网络(GNNs)是一类深度模型,可处理任意拓扑结构的数据。比如社交网络、知识图谱、分子结构等。GNNs通常被用来根据节点的交互关系学习节点的向量表示,典型的模型有gated GNN(Li et al., 2015)、MPNN(Giler et al., 2017)、GCN(Kipf & Welling, 2016)和GAT(Velikovi et al., 2018)。GNNs方法通常优于传统的随机游走、矩阵分解、核方法和概率图模型。
但是,这些模型无法学习到层次表示,因为它们没有利用图的组合性质。DiffPool (Ying et al., 2018)、TopKPool (Gao & Ji, 2019)、SAGPool (Lee et al., 2019)等模型引入参数化的图池化层,通过堆叠交错层和池化层来学习层次图表示。但这些模型的计算效率不高,因为它们需要在每个池化层后进行消息传递计算。
本论文介绍了一个能够同时进行图表示学习和节点聚类的记忆层,该记忆层由多组(multi-head)记忆键和卷积运算组成。记忆键被视为聚类中心,而卷积运算用来聚合多组结果。记忆层的输入叫做query,是前一层输出的节点表示,记忆层的输出是聚类后的节点表示。这种记忆层不显式依赖节点的连接信息,因此不存在过度平滑问题(Xu et al., 2018),同时也改进了效率和性能。
作者在论文中提出了两种基于记忆层的网络,分别叫做memory-based GNN(MemGNN)和graph memory network(GMN)。其中MemGNN就是首先使用GNN学习节点的初始表示然后堆叠记忆层学习层次表示;GMN则不依赖GNN,因此也不需要消息传递的计算。
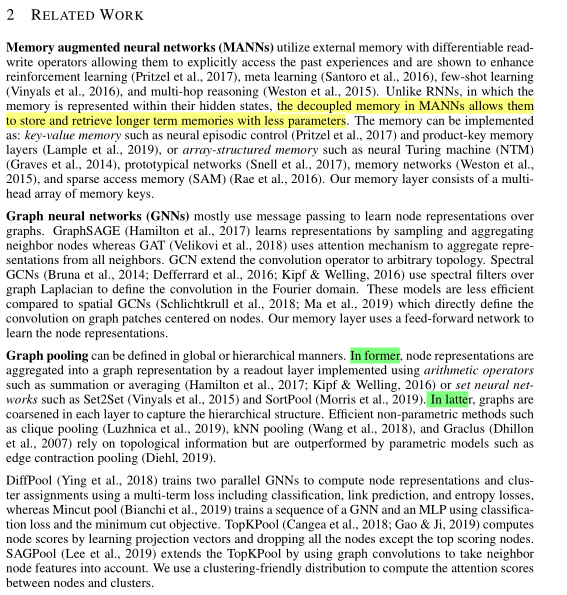
相关工作
方法
下面开始讲记忆层究竟是什么,以及由此而来的两种网络架构,即GMN和MemGNN。
记忆层
第(l)层的记忆层可以表示为(mathcal{M}^{(l)}:mathbb{R}^{n_l imes d_l} longmapsto mathbb{R}^{n_{l+1} imes d_{l+1}}),记忆层输入(n_l)个维度为(d_l)的查询向量,生成(n_{l+1})个维度为(d_{l+1})的查询向量(下个记忆层的查询向量)。因为要自底向上学习图层次表示,要保证(n_{l+1} lt n_l)。
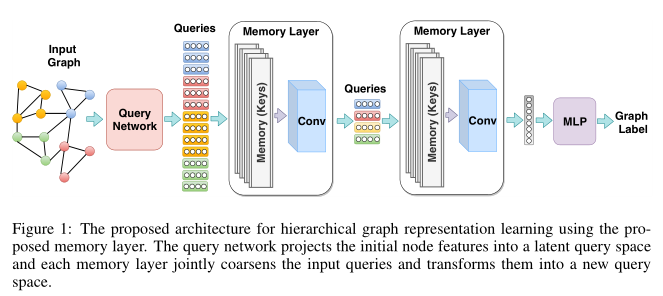
上图就是记忆层的示意图,假设其中有(|h|)组记忆键。现在来看看记忆层是怎么实现聚类的。首先,假设第(l)层记忆层的输入为(mathbf{Q}^{(l)} in mathbb{R}^{n_l imes d_l}),一组记忆键(mathbf{K}^{(l)} in mathbb{R}^{n_{l+1} imes d_l})可以看作是(mathbf{Q}^{(l)})的聚类中心。为了衡量(mathbf{Q}^{(l)})和(mathbf{K}^{(l)})每个分量之间的相似度,作者借鉴Xie et al., 2016的工作,使用t分布作为核函数。因此查询(q_i)和记忆键(k_j)的正则化的相似度定义为:
(C_{i,j})就是将节点(i)分配到类簇(j)的概率,或者说(q_i)和(k_j)之间的注意力权重。( au)是t分布的自由度。前面我们说到,记忆键总共有(|h|)组,因此实际上上述聚类要计算(|h|)次,得到结果为([mathbf{C}_0^{(l)} dots mathbf{C}_{|h|}^{(l)}] in mathbb{R}^{|h| imes n_{l+1} imes n_l})。为了将(h)组结果聚合为一组结果,作者将三个维度分别看作深度、高度和宽度,然后使用一个(1 imes 1)的卷积进行聚合:
其中,(Gamma_{phi})是(1 imes 1)的卷积,(mathbf{C}^{(l)})就是聚合后的分配矩阵。
之后,值(value)矩阵(mathbf{V}^{(l)} in mathbb{R}^{n_{l+1} imes d_l})由下式定义:
由于(mathbf{V}^{(l)})元素维度和(mathbf{Q}^{(l)})元素维度相同,作者认为这就表示在相同空间对节点聚类,之后还要经过一个单层前向网络将(mathbf{V}^{(l)})投影为新的查询:
其中(sigma)是LeankyReLU激活函数。(mathbf{Q}^{(l+1)})将作为下一个记忆层的查询。
对于图分类任务,我们可以通过堆叠记忆层最终获得整个图的向量表示,然后用全连接层进行分类:
其中,(mathbf{Q}^{(0)}=f_q(g))是将图(g)输入网络(f_g)得到的初始查询表示,也就是初始节点向量。根据(f_q)的不同,作者引出了两种模型,即GMN和MemGNN。
GMN架构
GMN将图中节点表示视为排列不变(permutation-invariant)集,也就是不考虑它们之间的空间关系,因此也不需要使用到图神经网络中的消息传递机制。但是,图中节点毕竟是存在拓扑关系的,完全不考虑是行不通的,因此作者考虑的是把节点的拓扑关系编码到节点的初始表示中。更具体地说,作者使用带重启的随机游走(RWR)(Pan et al., 2004)来计算拓扑嵌入,然后按行对它们进行排序,以强制节点嵌入保持顺序不变。得到包含拓扑信息的节点表示(mathbf{X} in mathbb{R}^{n imes d_{in}})后,初始的查询表示通过两层前向网络计算得到:
其中(mathbf{W}_0 in mathbb{R}^{n imes d_{in}})和(mathbf{W}_1 in mathbb{R}^{2d_{in} imes d_{0}})是参数,(mathbf{S} in mathbb{R}^{n imes n})是图扩散矩阵,(Vert)表示拼接操作,(sigma)是LeakyReLU激活函数。
MemGNN架构
MemGNN直接使用图神经网络计算初始查询:
其中,(G_{ heta})是任意的图神经网络。作者在实现时使用了GAT模型的改进版e-GAT,也就是在计算注意力权重时考虑了边特征。注意力权重计算公式为:
其中(h_i^{(l)}, h_{i ightarrow j}^{(l)})分别是节点表示和边表示,(mathbf{W}_n, mathbf{W}_e)分别是节点权重和边权重,(mathbf{W})是前向网络参数,(sigma)是LeakyReLU激活函数。
模型训练
模型的损失包含两部分,有监督损失和无监督损失。有监督损失(mathcal{L}_{sup})来自图分类或者图回归损失。无监督损失用于鼓励模型学习利于聚类的表示,由(mathbf{C}^{(l)})和辅助分布(mathbf{P}^{(l)})之间的KL散度定义:
其中辅助分布(mathbf{P}^{(l)})的计算和Xie et al., 2016一样,
因此模型最终的损失定义为
为了使训练更稳定,(mathcal{L}_{sup})产生的的梯度每个batch进行反向传播,而(mathcal{L}_{KL}^{(l)})产生的梯度每个epoch反向传播一次,可以通过反复调整(lambda)的取值为0或1实现。这是因为快速地调整聚类中心,也就是记忆键,可能会导致训练不稳定。
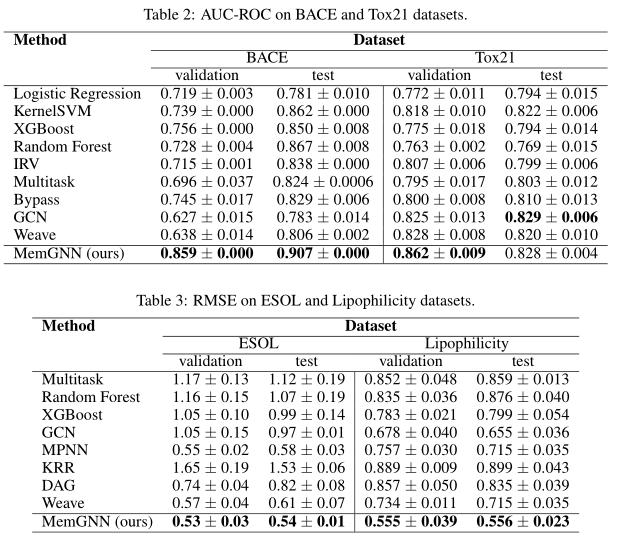
实验
论文主要关注图分类和图回归任务,使用了5个图分类数据集和2个图回归数据集:
主要实验结果如下面几幅图所示: