arduino 套件使用说明书V1.0.pdf,
步进电机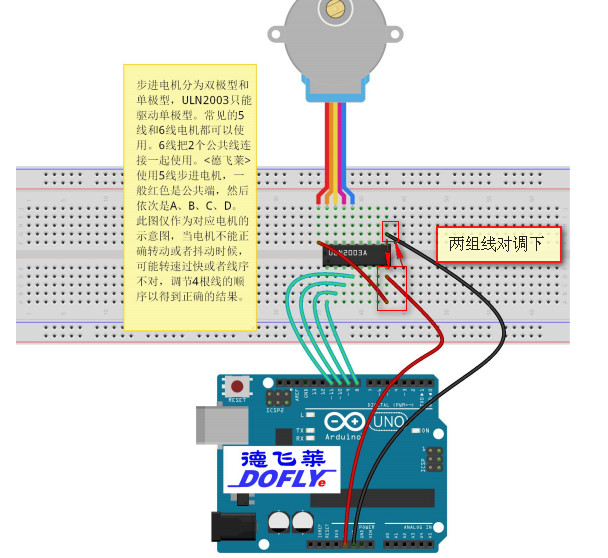
DHT11
传感器另外一脚要接A0


/* Web client This sketch connects to a website (http://www.google.com) using an Arduino Wiznet Ethernet shield. Circuit: * Ethernet shield attached to pins 10, 11, 12, 13 created 18 Dec 2009 by David A. Mellis modified 9 Apr 2012 by Tom Igoe, based on work by Adrian McEwen */ #include <SPI.h> #include <Ethernet.h> #define DHT11_PIN 1 // Enter a MAC address for your controller below. // Newer Ethernet shields have a MAC address printed on a sticker on the shield byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED }; // if you don't want to use DNS (and reduce your sketch size) // use the numeric IP instead of the name for the server: //IPAddress server(74,125,232,128); // numeric IP for Google (no DNS) char server[] = "192.168.1.95"; // name address for Google (using DNS) // Set the static IP address to use if the DHCP fails to assign IPAddress ip(192,168,99,177); // Initialize the Ethernet client library // with the IP address and port of the server // that you want to connect to (port 80 is default for HTTP): EthernetClient client; void uploadData(String c,String h){ // if you get a connection, report back via serial: if (client.connect(server, 6543)) { Serial.println("connected"); // Make a HTTP request: client.println("GET /DHT11Data.ashx?C="+c+"&h="+h+" HTTP/1.1"); client.println("Host:192.168.1.95"); client.println("Connection: close"); client.println(); delay(10); // if there are incoming bytes available // from the server, read them and print them: while (client.available()) { char c = client.read(); Serial.print(c); } } else { // kf you didn't get a connection to the server: Serial.println("connection failed"); } // if the server's disconnected, stop the client: if (!client.connected()) { Serial.println(); Serial.println("disconnecting."); client.stop(); // do nothing forevermore: } } byte read_dht11_dat() { byte i = 0; byte result = 0; for(i=0;i<8;i++) { while(!(PINC&_BV(DHT11_PIN))); delayMicroseconds(30); if(PINC&_BV(DHT11_PIN)) result|=(1<<(7-i)); while((PINC&_BV(DHT11_PIN))); } return result; } void setup() { DDRC|=_BV(DHT11_PIN); PORTC|=_BV(DHT11_PIN); // Open serial communications and wait for port to open: Serial.begin(9600); while (!Serial) { ; // wait for serial port to connect. Needed for Leonardo only } // start the Ethernet connection: if (Ethernet.begin(mac) == 0) { Serial.println("Failed to configure Ethernet using DHCP"); // no point in carrying on, so do nothing forevermore: // try to congifure using IP address instead of DHCP: Ethernet.begin(mac, ip); } // give the Ethernet shield a second to initialize: delay(1000); Serial.println("Ready"); } void loop() { byte dht11_dat[5]; byte dht11_in; byte i; PORTC &= ~_BV(DHT11_PIN); delay(18); PORTC|=_BV(DHT11_PIN); delayMicroseconds(40); DDRC &= ~_BV(DHT11_PIN); delayMicroseconds(40); dht11_in = PINC & _BV(DHT11_PIN); if(dht11_in) { Serial.println("dht11 start condition 1 not met"); return; } delayMicroseconds(80); dht11_in=PINC & _BV(DHT11_PIN); if(!dht11_in) { Serial.println("dht11 start condition 2 not met"); return; } delayMicroseconds(80); for(i=0;i<5;i++) dht11_dat[i]=read_dht11_dat(); DDRC|=_BV(DHT11_PIN); PORTC|=_BV(DHT11_PIN); byte dht11_check_sum = dht11_dat[0]+dht11_dat[1]+dht11_dat[2]+dht11_dat[3]; if(dht11_dat[4]!=dht11_check_sum) { Serial.println("DHT11 checksum error"); } uploadData(String(dht11_dat[2]) +"." +String(dht11_dat[3]),String(dht11_dat[0]) +"." +String(dht11_dat[1]) ); Serial.print("Current humdity= "); Serial.print(String(dht11_dat[0])); Serial.print("."); Serial.print(dht11_dat[1],DEC); Serial.print("%"); Serial.print("temperature = "); Serial.print(dht11_dat[2],DEC); Serial.print("."); Serial.print(dht11_dat[3],DEC); Serial.println("C"); delay(1000); }
调整PWM频率
源代码如下:Here are some usage examples of the function: // Set pin 9's PWM frequency to 3906 Hz (31250/8 = 3906) // Note that the base frequency for pins 3, 9, 10, and 11 is 31250 Hz setPwmFrequency(9, 8); // Set pin 6's PWM frequency to 62500 Hz (62500/1 = 62500) // Note that the base frequency for pins 5 and 6 is 62500 Hz setPwmFrequency(6, 1); // Set pin 10's PWM frequency to 31 Hz (31250/1024 = 31) setPwmFrequency(10, 1024); Please keep in mind that changing the PWM frequency changes the Atmega's timers and disrupts the normal operation of many functions that rely on time (delay(), millis(), Servo library). /** * Divides a given PWM pin frequency by a divisor. * * The resulting frequency is equal to the base frequency divided by * the given divisor: * - Base frequencies: * o The base frequency for pins 3, 9, 10, and 11 is 31250 Hz. * o The base frequency for pins 5 and 6 is 62500 Hz. * - Divisors: * o The divisors available on pins 5, 6, 9 and 10 are: 1, 8, 64, * 256, and 1024. * o The divisors available on pins 3 and 11 are: 1, 8, 32, 64, * 128, 256, and 1024. * * PWM frequencies are tied together in pairs of pins. If one in a * pair is changed, the other is also changed to match: * - Pins 5 and 6 are paired on timer0 * - Pins 9 and 10 are paired on timer1 * - Pins 3 and 11 are paired on timer2 * * Note that this function will have side effects on anything else * that uses timers: * - Changes on pins 3, 5, 6, or 11 may cause the delay() and * millis() functions to stop working. Other timing-related * functions may also be affected. * - Changes on pins 9 or 10 will cause the Servo library to function * incorrectly. * * Thanks to macegr of the Arduino forums for his documentation of the * PWM frequency divisors. His post can be viewed at: * http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1235060559/0#4 */ void setPwmFrequency(int pin, int divisor) { byte mode; if(pin == 5 || pin == 6 || pin == 9 || pin == 10) { switch(divisor) { case 1: mode = 0x01; break; case 8: mode = 0x02; break; case 64: mode = 0x03; break; case 256: mode = 0x04; break; case 1024: mode = 0x05; break; default: return; } if(pin == 5 || pin == 6) { TCCR0B = TCCR0B & 0b11111000 | mode; } else { TCCR1B = TCCR1B & 0b11111000 | mode; } } else if(pin == 3 || pin == 11) { switch(divisor) { case 1: mode = 0x01; break; case 8: mode = 0x02; break; case 32: mode = 0x03; break; case 64: mode = 0x04; break; case 128: mode = 0x05; break; case 256: mode = 0x06; break; case 1024: mode = 0x7; break; default: return; } TCCR2B = TCCR2B & 0b11111000 | mode; } }
关于按钮软件去抖动法
unsigned char btnIsPress=0; const int buttonPin = 7; // 按键位置 const int ledPin = 13; // led 位置 // 定义变量 int ledState = HIGH; // 当前led 状态 int buttonState=0; // 读取的当前按键状态 int lastButtonState = 0; // 上次读取的按键状态 // 使用长整型变量 long lastDebounceTime = 0; // 上次按键触发时间 long debounceDelay = 50; // 去抖时间,根 void setup() { // put your setup code here, to run once: pinMode(buttonPin, INPUT); pinMode(ledPin, OUTPUT); // 初始化led 的状态 digitalWrite(ledPin, ledState); Serial.begin(9600); } void loop() { // put your main code here, to run repeatedly: // checkResetPress(); checkBtnPress(); } void checkBtnPress(){ int reading = digitalRead(buttonPin); if (reading != lastButtonState) { lastDebounceTime = millis(); } if ((millis() - lastDebounceTime) > debounceDelay) { if (reading != buttonState) { buttonState = reading; if (buttonState == HIGH) { ledState = !ledState; } } } digitalWrite(ledPin, ledState); lastButtonState = reading; } void checkResetPress(){ btnIsPress= digitalRead(buttonPin); Serial.println(btnIsPress); if(btnIsPress==0){ delay(100); btnIsPress= digitalRead(buttonPin); if(btnIsPress==0){ delay(4000); btnIsPress= digitalRead(buttonPin); if(btnIsPress==0){ Serial.println("yes!"); } } } }
上面代码中,if (buttonState == HIGH){ledState=!ledState;} 表示只识别脉冲的上升或阶段,因为一次按键相当于一次脉冲,有上升与下降两个边缘,
如果去掉判断,那么没次按钮时,只能发现led闪几下就又恢复原样(按前是灭还是亮)