EPF滤波概述
均值与滤波的缺点:并没有考虑中心像素点对整个输出像素的贡献,实际上锚定的那个点贡献应该是最大的
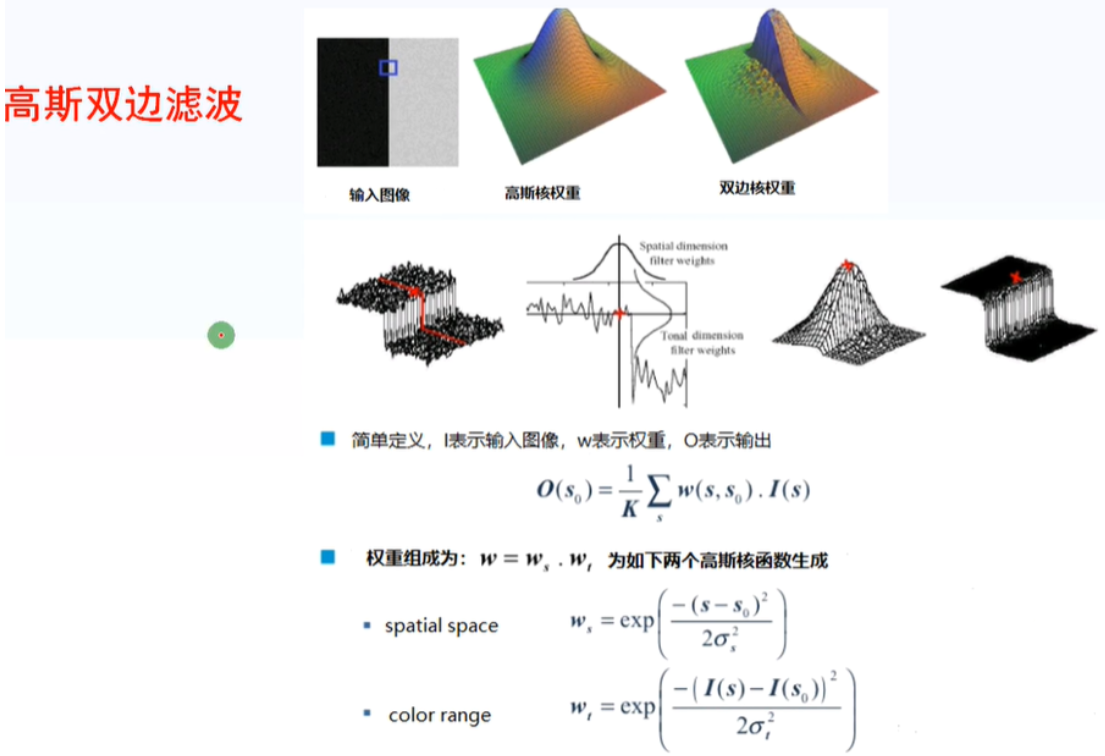
高斯滤波的缺点:当边缘值梯度很大的时候,应减少中心像素点的权重,而高斯滤波没有考虑
边缘保留滤波:
- 高斯双边
- 均值迁移
- 局部均方差
高斯双边滤波
非局部均值滤波

example
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
void add_salt_and_pepper_noise(Mat& image);
void add_gaussian_noise(Mat& image);
int main(int argc, char** argv)
{
Mat src = imread("f:/images/lena.jpg");
if (src.empty())
{
printf("Could not find the image!
");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
//add_salt_and_pepper_noise(src);
add_gaussian_noise(src);
Mat dst;
// 中值滤波
medianBlur(src, dst, 3);
imshow("median denoise demo", dst);
// 高斯滤波 高斯滤波对椒盐噪声去噪效果不理想
GaussianBlur(src, dst, Size(5, 5), 0);
imshow("guassian denoise demo", dst);
// 高斯双边
bilateralFilter(src, dst, 0, 100, 10);
imshow("bilateralF denoise demo", dst);
// 如果不加噪声, 直接进行高斯双边,去掉微小细节,保留边缘
src = imread("f:/images/lena.jpg");
bilateralFilter(src, dst, 0, 100, 10);
imshow("src - bilateralFilter", dst);
// NLM 非局部均值去燥
src = imread("f:/images/lena.jpg");
add_gaussian_noise(src);
// 除了彩色版本,还有灰度版本等一些其他版本
fastNlMeansDenoisingColored(src, dst, 3., 3., 7, 21);
imshow("NLM", dst);
waitKey(0);
destroyAllWindows();
return 0;
}
void add_salt_and_pepper_noise(Mat& image) {
RNG rng(12345);
int h = image.rows;
int w = image.cols;
int nums = 10000;
for (int i = 0; i < nums; i++) {
int x = rng.uniform(0, w);
int y = rng.uniform(0, h);
if (i % 2 == 1) {
image.at<Vec3b>(y, x) = Vec3b(255, 255, 255);
}
else {
image.at<Vec3b>(y, x) = Vec3b(0, 0, 0);
}
}
imshow("salt and pepper noise", image);
}
void add_gaussian_noise(Mat& image) {
// 高斯噪声
Mat noise = Mat::zeros(image.size(), image.type());
// 图像,均值,方差,显示一幅随机图像
randn(noise, Scalar(15, 25, 45), Scalar(30, 30, 30));
Mat dst;
add(image, noise, dst);
dst.copyTo(image);
imshow("gaussian noise", image);
}