深度学习课程笔记(一)CNN 解析篇
相关资料来自:http://speech.ee.ntu.edu.tw/~tlkagk/courses_ML17_2.html
首先提到 Why CNN for Image ?
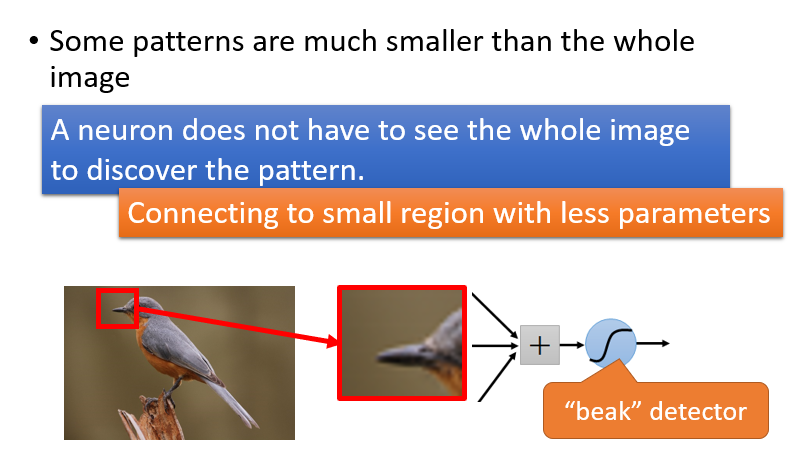
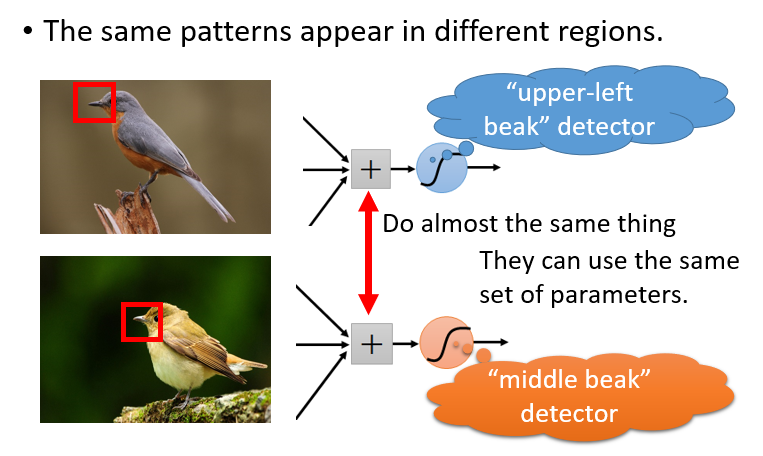
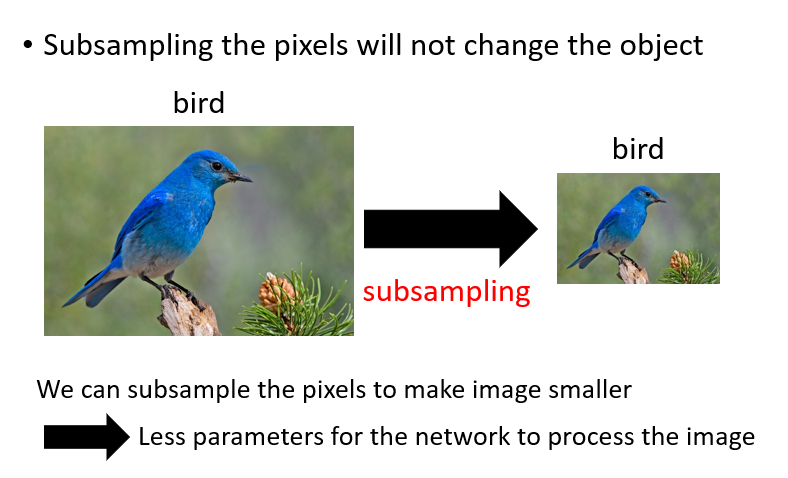
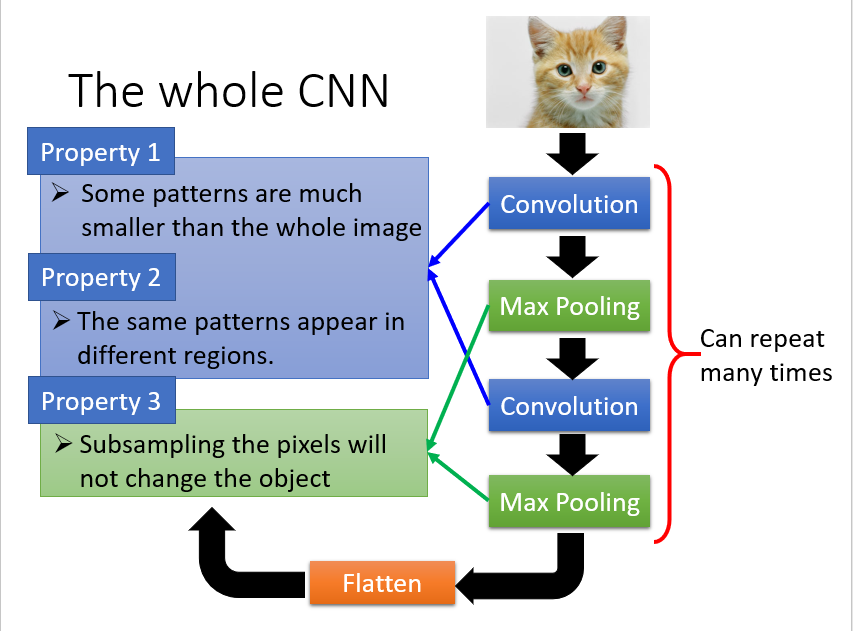
综合上述三个特点,我们可以看到图像识别有如下的特色:
=================================== 分割线 =======================================================
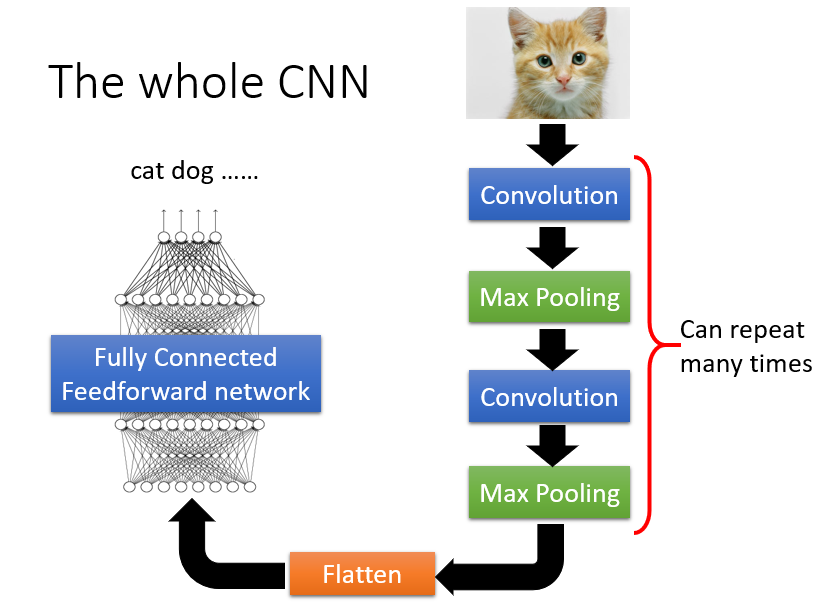
以上就是整体上来感受下深度神经网络,接下来我们仔细分析下每一个部件:
1. Convolution Layer
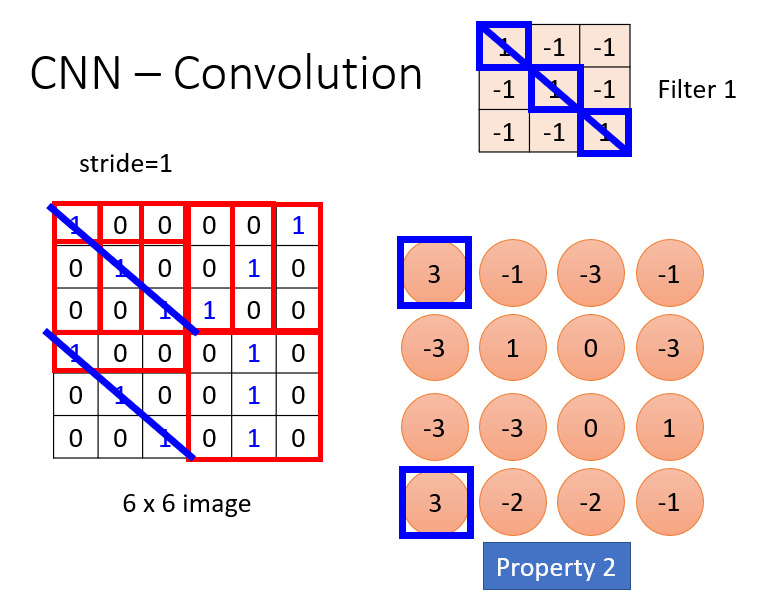
所谓卷积层,就是将两个矩阵进行卷积操作,这里的两个矩阵分别是指 卷积核(filter)和每一个与filter相同大小的图像区域。这里的卷积操作就是 点成(矩阵对应元素相乘)。
然后没执行一次这样的操作,就滑动一次filter,然后进行下一个区域的卷积操作,直至整幅图像被处理完毕。滑动的幅度,称为stride (步长)。如下图所示:
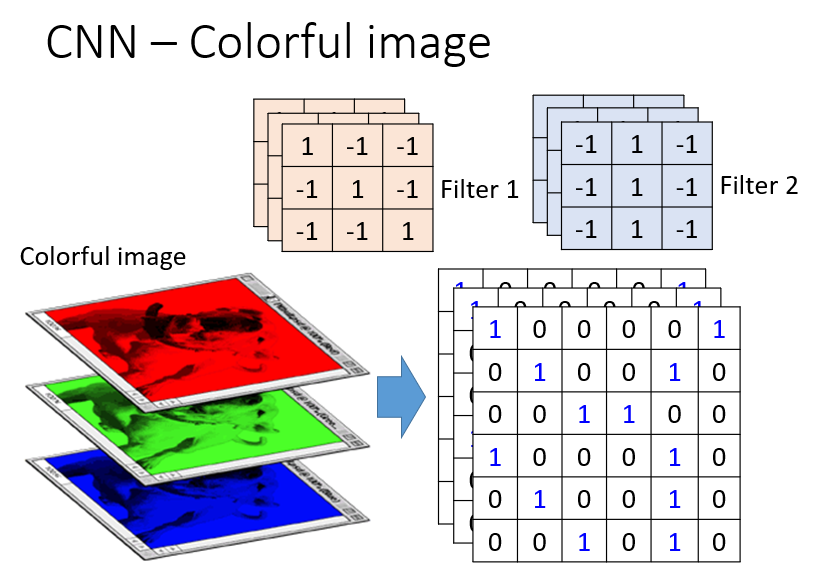
然后再用另一组 filter 对该图像进行类似的处理。一张图像可以用多个卷积核来进行处理。上面提到的图像是 gray image,而对于彩色图像来说,是三个通道的。这个没有关系,我们将三个 filter 作为一组,分别对三个 channel 进行卷积,就可以了。如下图所示:
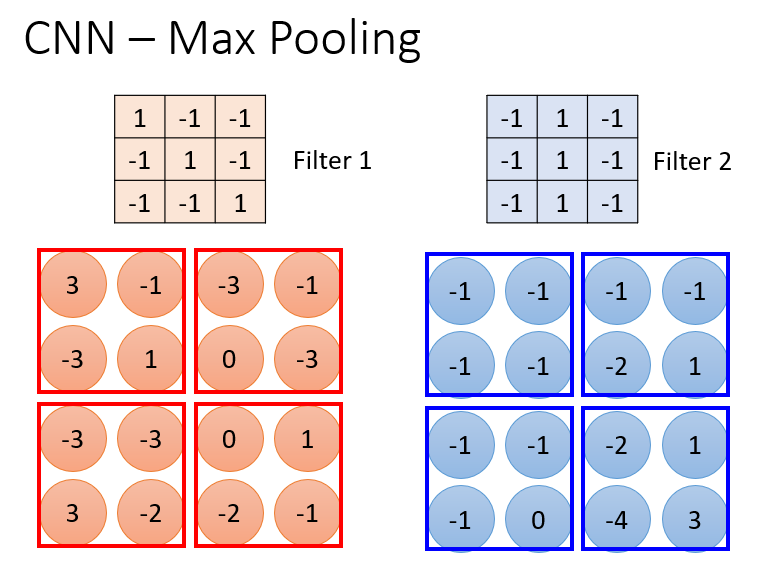
2. Pooling Layer:
所谓的池化层,就是对得到的 feature map 进行降采样处理,常见的有,mean, max pooling operation 等。即:在一个区域内,如:2*2 的区域,max pooling 就是选择一个 max value 来代表这个区域,其余的直接扔掉。mean 就是取这些 value 的平均值来代替这些。当然也可以同时进行 max 和 mean pooling 操作,来完成降采样的过程。
需要说明的是,max pooling 其实并不是必须的,如:在AlphaGo 中,使用的网络结构并没有使用 max pooling layer,因为使用了这个层,就会丢失一定的信息,而实际上 棋盘丢失了某些信息,结果是无法想象的。因为这可能会导致不同的局面。。。这是李宏毅老师的解释。。。但是,我觉得,这只是整个分辨率降低了而已,没有那么大的影响吧???如果有小伙伴知道更详细的答案,请不吝赐教。
3. Fully Connected Layer:
全连接层 也是常见的 CNN 组件,一般用来输出一组向量。而 fc layer 和 convolutional layer 可以看做是类似的操作,为何这么说呢?且看下图:
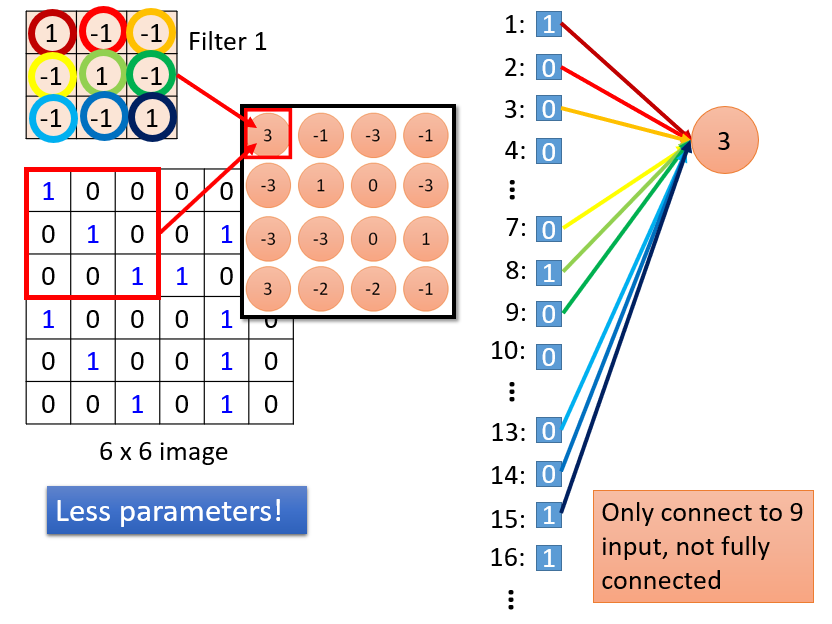
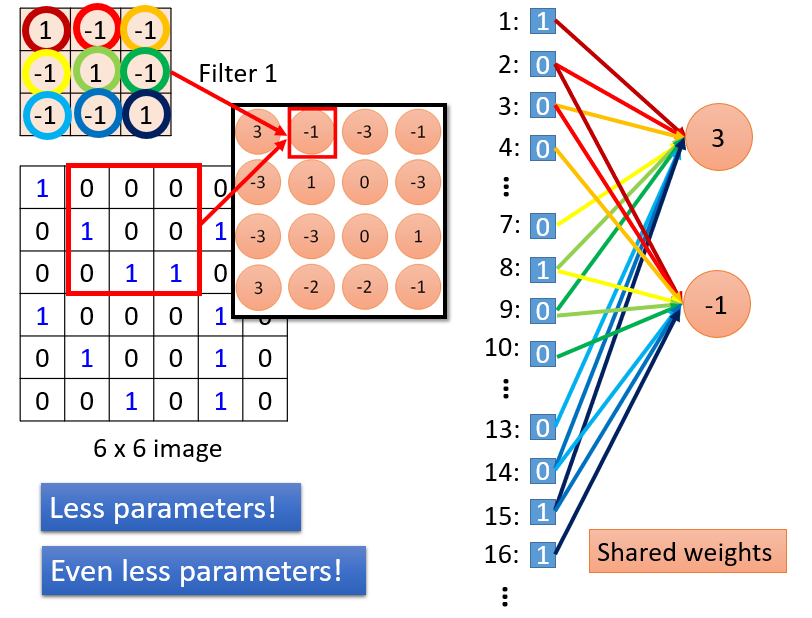
上图中,我们将 filter 中不同的 weight 设置为不同的颜色,在进行卷积操作的时候,我们进行对应元素点乘操作,从而得到 3 。我们将对应图像区域中的元素标上标号可以看出,我们这里仅仅和 9 个输入元素进行了连接,而不是所有的元素。所以,这里 convolutional layer 是 sparse connected。同时,在移动之后的卷积操作也是类似,而且这两个过程是共享权重的,都分享了同一个 filter 1. 这样就可以降低参数的数量,使得训练和测试都可以尽量快速的执行。
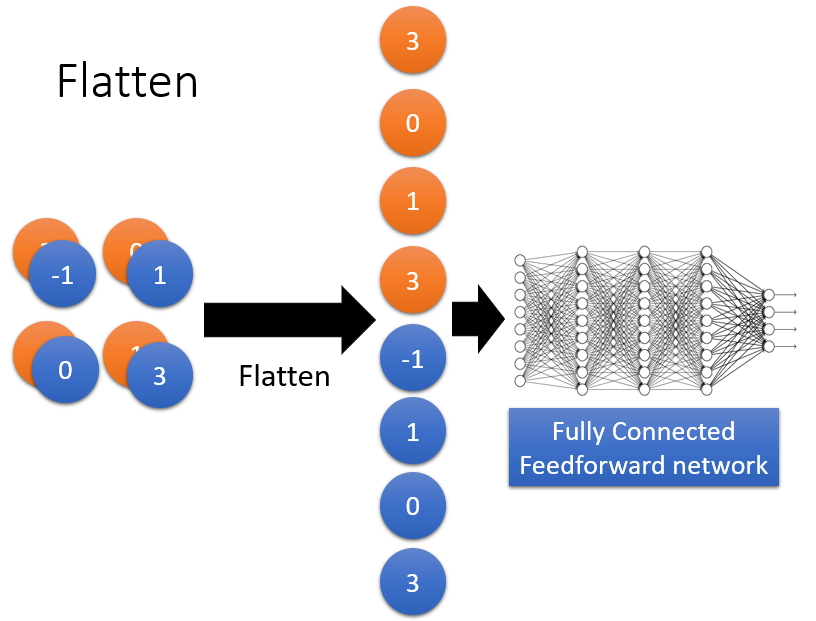
这里还有一个比较迷糊人的问题是,卷积层 出来的 feature map 是一个立方体矩阵,而 fc layer 处理的是 vector,这两者之间是怎么接起来的呢?看下图:
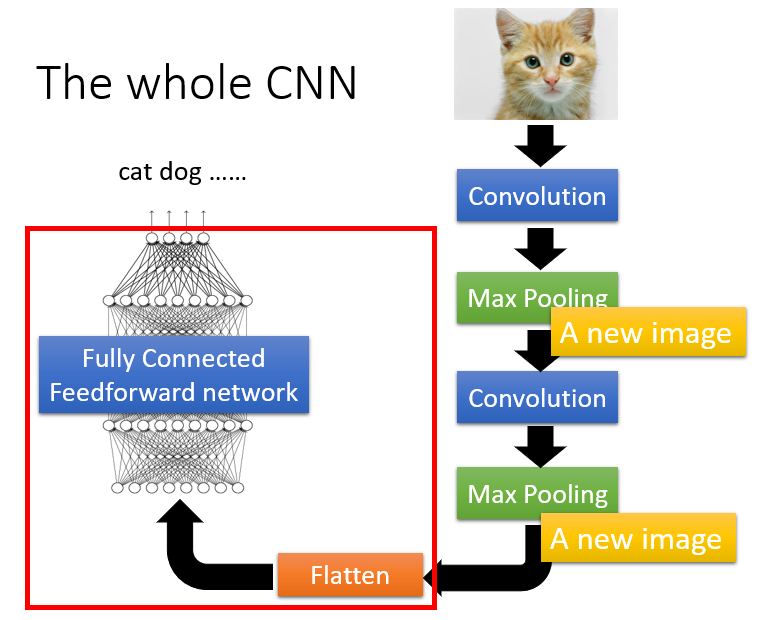
是的,你没有看错,两者之间有一个 flatten 的操作,即:将 feature map 按照每一个 map 展开,然后拼接在一起,构成一个大的 vector,再进行处理。整个过程如下所示:
4. 激活层:
常见的激活函数,有 sigmoid, ReLU, PReLU 等等。这些非线性函数被引入到 CNN 当中来,使得该模型具有非线性拟合能力。从而,可以执行更加复杂多样的任务。
========================================== 分割线 =================================================
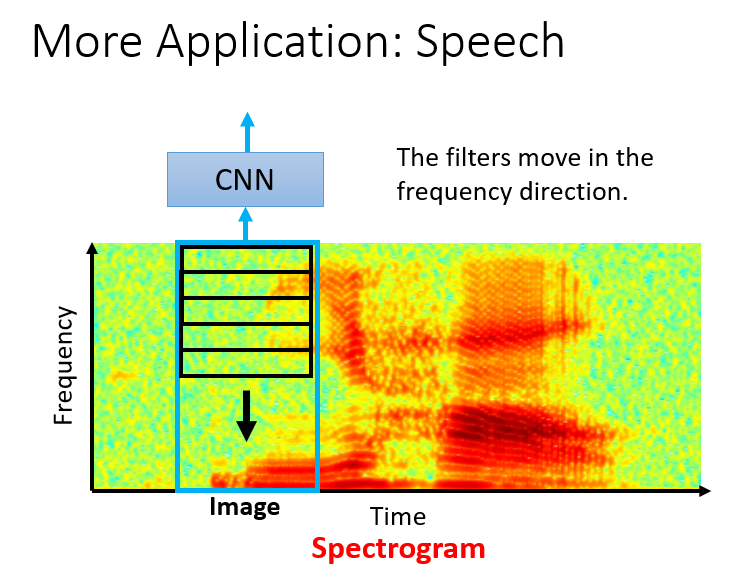
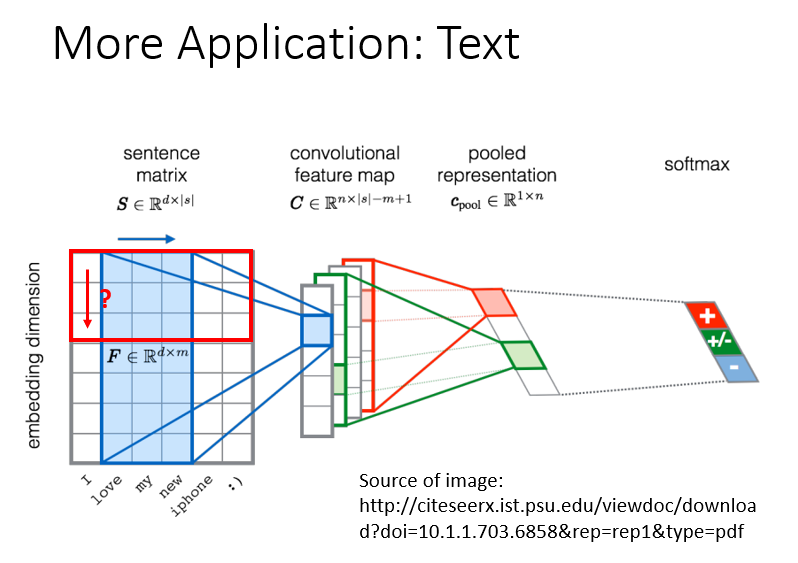
CNN 常见的应用除了在图像领域之外,还有语音和自然语言领域。你可能比较纳闷,CNN 不是专门用来处理图像的吗?
宏观的来看,这只是一个执行 weighting operation 的网络,是可以处理任何 matrix 形式的东西的。例如:将语音和文本转化为 matrix 的形式,就可以利用 CNN 来进行特征的学习,从而完成后续的研究任务,像语音识别,等等。
======================== 完毕 ==============================
基础的图像识别的例子 ------ pytorch 版本:
from __future__ import print_function
import argparse
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from torch.autograd import Variable
# Training settings
parser = argparse.ArgumentParser(description='PyTorch MNIST Example')
parser.add_argument('--batch-size', type=int, default=64, metavar='N',
help='input batch size for training (default: 64)')
parser.add_argument('--test-batch-size', type=int, default=1000, metavar='N',
help='input batch size for testing (default: 1000)')
parser.add_argument('--epochs', type=int, default=10, metavar='N',
help='number of epochs to train (default: 10)')
parser.add_argument('--lr', type=float, default=0.01, metavar='LR',
help='learning rate (default: 0.01)')
parser.add_argument('--momentum', type=float, default=0.5, metavar='M',
help='SGD momentum (default: 0.5)')
parser.add_argument('--no-cuda', action='store_true', default=False,
help='disables CUDA training')
parser.add_argument('--seed', type=int, default=1, metavar='S',
help='random seed (default: 1)')
parser.add_argument('--log-interval', type=int, default=10, metavar='N',
help='how many batches to wait before logging training status')
args = parser.parse_args()
args.cuda = not args.no_cuda and torch.cuda.is_available()
torch.manual_seed(args.seed)
if args.cuda:
torch.cuda.manual_seed(args.seed)
kwargs = {'num_workers': 1, 'pin_memory': True} if args.cuda else {}
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=args.batch_size, shuffle=True, **kwargs)
test_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=False, transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=args.test_batch_size, shuffle=True, **kwargs)
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 10, kernel_size=5)
self.conv2 = nn.Conv2d(10, 20, kernel_size=5)
self.conv2_drop = nn.Dropout2d()
self.fc1 = nn.Linear(320, 50)
self.fc2 = nn.Linear(50, 10)
def forward(self, x):
x = F.relu(F.max_pool2d(self.conv1(x), 2))
x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)), 2))
x = x.view(-1, 320)
x = F.relu(self.fc1(x))
x = F.dropout(x, training=self.training)
x = self.fc2(x)
return F.log_softmax(x)
model = Net()
if args.cuda:
model.cuda()
optimizer = optim.SGD(model.parameters(), lr=args.lr, momentum=args.momentum)
def train(epoch):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
if args.cuda:
data, target = data.cuda(), target.cuda()
data, target = Variable(data), Variable(target)
optimizer.zero_grad()
output = model(data)
loss = F.nll_loss(output, target)
loss.backward()
optimizer.step()
if batch_idx % args.log_interval == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)] Loss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.data[0]))
def test():
model.eval()
test_loss = 0
correct = 0
for data, target in test_loader:
if args.cuda:
data, target = data.cuda(), target.cuda()
data, target = Variable(data, volatile=True), Variable(target)
output = model(data)
test_loss += F.nll_loss(output, target, size_average=False).data[0] # sum up batch loss
pred = output.data.max(1, keepdim=True)[1] # get the index of the max log-probability
correct += pred.eq(target.data.view_as(pred)).cpu().sum()
test_loss /= len(test_loader.dataset)
print('
Test set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)
'.format(
test_loss, correct, len(test_loader.dataset),
100. * correct / len(test_loader.dataset)))
for epoch in range(1, args.epochs + 1):
train(epoch)
test()