这篇博文是Model-Free Control的一部分,事实上SARSA和Q-learning with ϵ-greedy Exploration都是不依赖模型的控制的一部分,如果你想要全面的了解它们,建议阅读原文。
SARSA Algorithm
SARSA代表state,action,reward,next state,action taken in next state,算法在每次采样到该五元组时更新,所以得名SARSA。
1
:
S
e
t
1: Set
1: Set Initial
ϵ
epsilon
ϵ-greedy policy
π
,
t
=
0
pi,t=0
π,t=0, initial state
s
t
=
s
0
s_t=s_0
st=s0
2
:
T
a
k
e
a
t
∼
π
(
s
t
)
2: Take a_t sim pi(s_t)
2: Take at∼π(st) // Sample action from policy
3
:
O
b
s
e
r
v
e
(
r
t
,
s
t
+
1
)
3: Observe (r_t, s_{t+1})
3: Observe (rt,st+1)
4
:
l
o
o
p
4: loop
4: loop
5
:
T
a
k
e
5: quad Take
5: Take action
a
t
+
1
∼
π
(
s
t
+
1
)
a_{t+1}sim pi(s_{t+1})
at+1∼π(st+1)
6
:
O
b
s
e
r
v
e
(
r
t
+
1
,
s
t
+
2
)
6: quad Observe (r_{t+1},s_{t+2})
6: Observe (rt+1,st+2)
7
:
Q
(
s
t
,
a
t
)
←
Q
(
s
t
,
a
t
)
+
α
(
r
t
+
γ
Q
(
s
t
+
1
,
a
t
+
1
)
−
Q
(
s
t
,
a
t
)
)
7: quad Q(s_t,a_t) leftarrow Q(s_t,a_t)+alpha(r_t+gamma Q(s_{t+1},a_{t+1})-Q(s_t,a_t))
7: Q(st,at)←Q(st,at)+α(rt+γQ(st+1,at+1)−Q(st,at))
8
:
π
(
s
t
)
=
a
r
g
m
a
x
Q
(
s
t
,
a
)
w
.
p
r
o
b
1
−
ϵ
,
e
l
s
e
r
a
n
d
o
m
8: quad pi(s_t) = mathop{argmax} Q(s_t,a) w.prob 1-epsilon, else random
8: π(st)=argmax Q(st,a)w.prob 1−ϵ,else random
9
:
t
=
t
+
1
9: t=t+1
9: t=t+1
10
:
e
n
d
l
o
o
p
10: end loop
10:end loop
Q-learing: Learning the Optimal State-Action Value
我们能在不知道 π ∗ pi^* π∗的情况下估计最佳策略 π ∗ pi^* π∗的价值吗?
可以。使用Q-learning。
核心思想: 维护state-action Q值的估计并且使用它来bootstrap最佳未来动作的的价值。
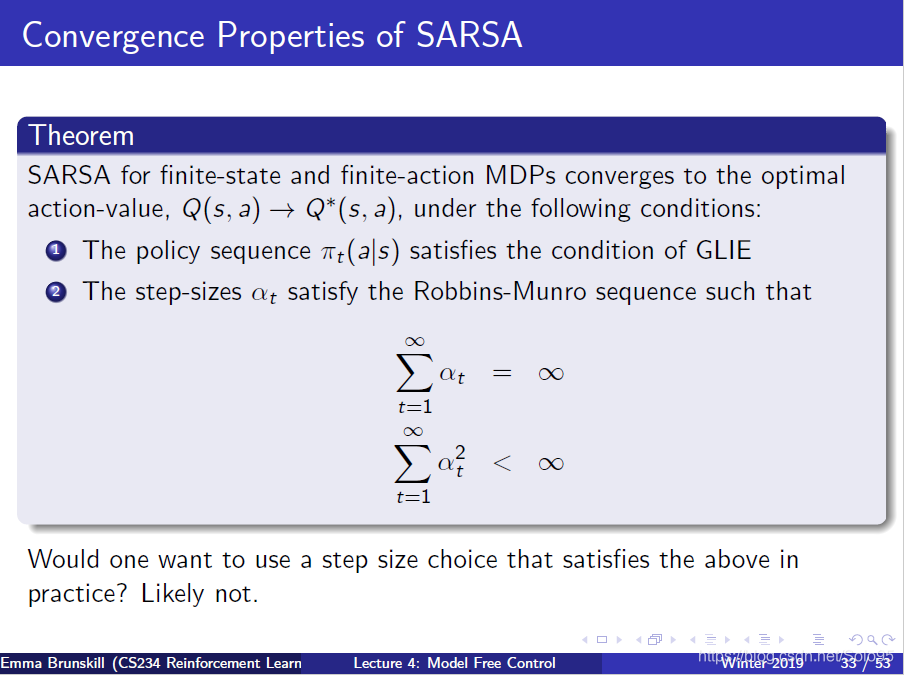
回顾SARSA
Q
(
s
t
,
a
t
)
←
Q
(
s
t
,
a
t
)
+
α
(
(
r
t
+
γ
Q
(
s
t
+
1
,
a
t
+
1
)
)
−
Q
(
s
t
,
a
t
)
)
Q(s_t,a_t)leftarrow Q(s_t,a_t)+alpha((r_t+gamma Q(s_{t+1},a_{t+1}))-Q(s_t,a_t))
Q(st,at)←Q(st,at)+α((rt+γQ(st+1,at+1))−Q(st,at))
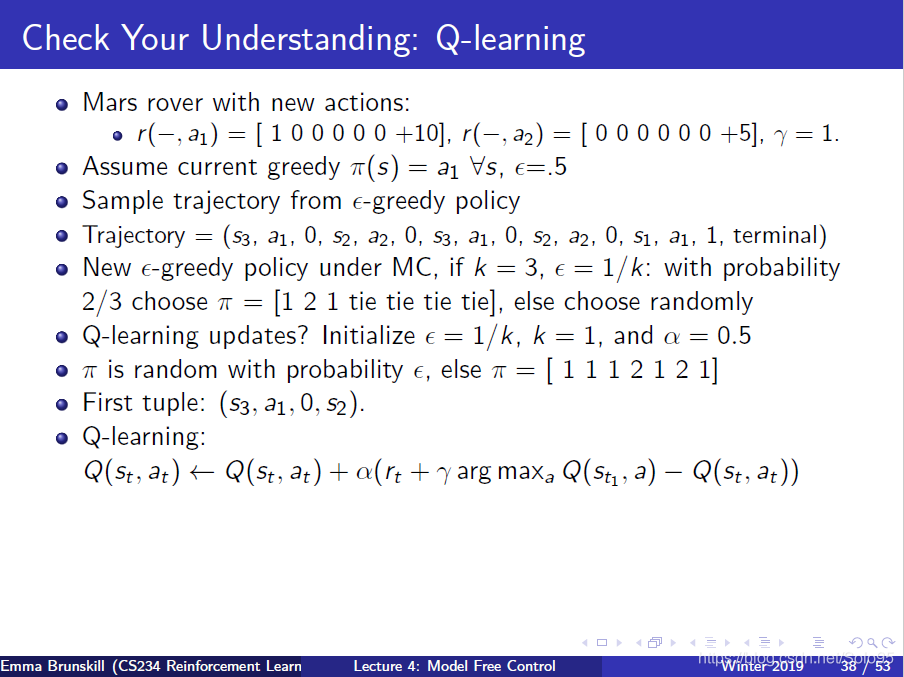
Q-learning
Q
(
s
t
,
a
t
)
←
Q
(
s
t
,
a
t
)
+
α
(
(
r
t
+
γ
m
a
x
a
′
Q
(
s
t
+
1
,
a
′
)
−
Q
(
s
t
,
a
t
)
)
)
Q(s_t,a_t)leftarrow Q(s_t,a_t)+alpha((r_t+gamma mathop{max}limits_{a'}Q(s_{t+1},a')-Q(s_t,a_t)))
Q(st,at)←Q(st,at)+α((rt+γa′maxQ(st+1,a′)−Q(st,at)))
Off-Policy Control Using Q-learning
- 在上一节中假定了有某个策略 π b pi_b πb可以用来执行
- π b pi_b πb决定了实际获得的回报
- 现在在来考虑如何提升行为策略(policy improvement)
- 使行为策略 π b pi_b πb是对(w.r.t)当前的最佳 Q ( s , a ) Q(s,a) Q(s,a)估计的- ϵ epsilon ϵ-greedy策略
Q-learning with ϵ epsilon ϵ-greedy Exploration
1
:
I
n
t
i
a
l
i
z
e
Q
(
s
,
a
)
,
∀
s
∈
S
,
a
∈
A
t
=
0
,
1: Intialize Q(s,a), forall s in S, a in A t=0,
1: Intialize Q(s,a),∀s∈S,a∈A t=0, initial state
s
t
=
s
0
s_t=s_0
st=s0
2
:
S
e
t
π
b
2: Set pi_b
2: Set πb to be
ϵ
epsilon
ϵ-greedy w.r.t. Q$
3
:
l
o
o
p
3: loop
3: loop
4
:
T
a
k
e
a
t
∼
π
b
(
s
t
)
4: quad Take a_t simpi_b(s_t)
4: Take at∼πb(st) // simple action from policy
5
:
O
b
s
e
r
v
e
(
r
t
,
s
t
+
1
)
5: quad Observe (r_t, s_{t+1})
5: Observe (rt,st+1)
6
:
U
p
d
a
t
e
Q
6: quad Update Q
6: Update Q given
(
s
t
,
a
t
,
r
t
,
s
t
+
1
)
(s_t,a_t,r_t,s_{t+1})
(st,at,rt,st+1)
7
:
Q
(
s
r
,
a
r
)
←
Q
(
s
t
,
r
t
)
+
α
(
r
t
+
γ
m
a
x
a
Q
(
s
t
1
,
a
)
−
Q
(
s
t
,
a
t
)
)
7: quad Q(s_r,a_r) leftarrow Q(s_t,r_t)+alpha(r_t+gamma mathop{max}limits_{a}Q(s_{t1},a)-Q(s_t,a_t))
7: Q(sr,ar)←Q(st,rt)+α(rt+γamaxQ(st1,a)−Q(st,at))
8
:
P
e
r
f
o
r
m
8: quad Perform
8: Perform policy impovement:
s
e
t
π
b
set pi_b
set πb to be
ϵ
epsilon
ϵ-greedy w.r.t Q
9
:
t
=
t
+
1
9: quad t=t+1
9: t=t+1
10
:
e
n
d
l
o
o
p
10: end loop
10:end loop
如何初始化
Q
Q
Q重要吗?
无论怎样初始化
Q
Q
Q(设为0,随机初始化)都会收敛到正确值,但是在实际应用上非常重要,以最优化初始化形式初始化它非常有帮助。会在exploration细讲这一点。
例题