雷达目标跟踪经常会有一些问题,算法会做出修改优化,用matlab等测试并给出成果文件与预期结果
一、回灌的目的:
确认算法的针对某个问题的修改是否有效
二、完成任务的步骤:
1. 在okit中获取任务链接【http://okit.chuhang.tech/taskDetail.action?taskUID=dbae919c6133495288efba5723bb1724&project_id=7】;
2. 任务里面会有算法的分析文档,根据文档了解下①具体是什么问题,②优化后应是什么效果;
3. 文档即成果文件中有数据路径,测完需要提供测试报告 。
三、回灌过程
1. 拉gitlab代码到本地
2. 烧录相应代码到板子
3. 用上位机进行回灌
4. 写测试报告
-----
1. 拉gitlab代码到本地 *ARC Gray分支在101平台
①查看git状态

②打开利用“git clone”命令下载的仓库代码所在的本地文件夹

③切换到所需要烧录的分支(从gitlab中复制commit SHA,然后在Git BASH窗口中执行“git checkout”)

-----
2. 烧录相应代码到板子
打开S32DS
①File-Switch Workspace-Other-Browse
打开git clone之后出现的最根部的文件夹
②File-Import-General-Existing Projects into Workspace-Next-Browse
打开刚刚的文件夹(git clone之后出现的最根部的文件夹)-不要勾BOOT,只要主文件
③Build

④样件接调试器(Multilink(PE-Fx))+电源(13.5V5A)-打开电源
⑤Flash from file...(黄色闪电)
双击GDB PEMicro…(进入New_configuration)-
配置Debugger:Device Name(选S32R274)-Core保持Z4-将Target Communication Speed中Debug Shift Freq(KHz)改为4000-Apply-
配置Main-选择.serc文件

-----
3. 用上位机进行回灌
打开上位机3C_VM.N(CH_Ctrl)
通过BroadR-Reach网口转接器(用自带电源)连接样件P_CAN口和电脑网口,给样件上电。
①(左下角)选NETWORK-Control-端口-Start
②(左上角)设置-状态机-NET(雷达一+ETH DEBUG)-Enter(成功将提示cmd 0×201:ack)
③(右边状态栏)Info【-取消Auto split的自动勾选(自动600拆包)-选择Save Data——回灌不用】
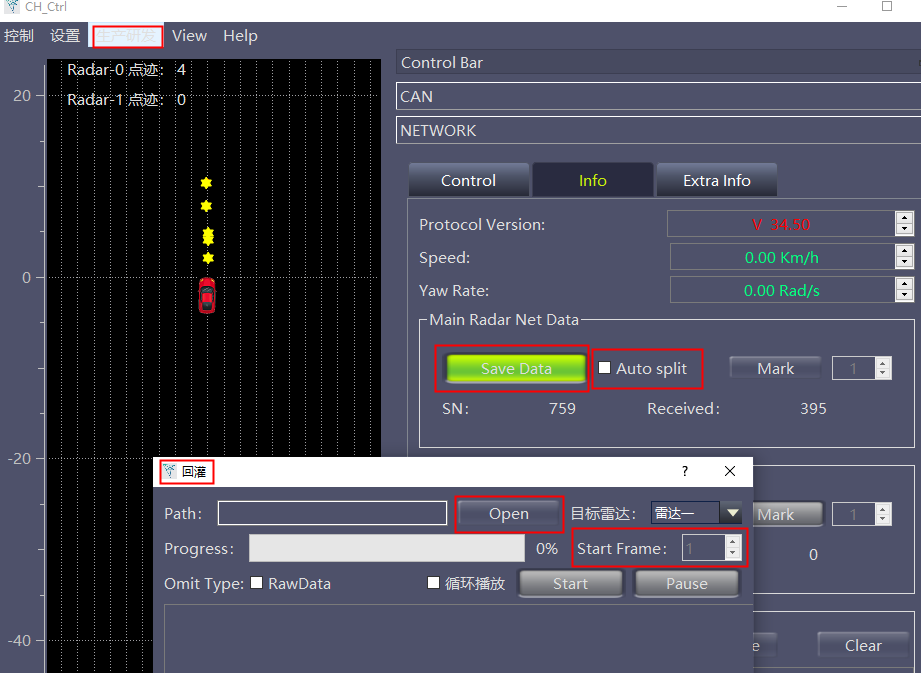
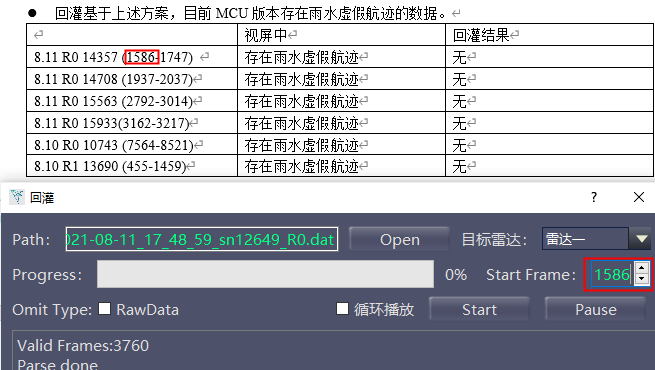
④根据文档选择需要开始的帧数
-----
4. 写测试报告
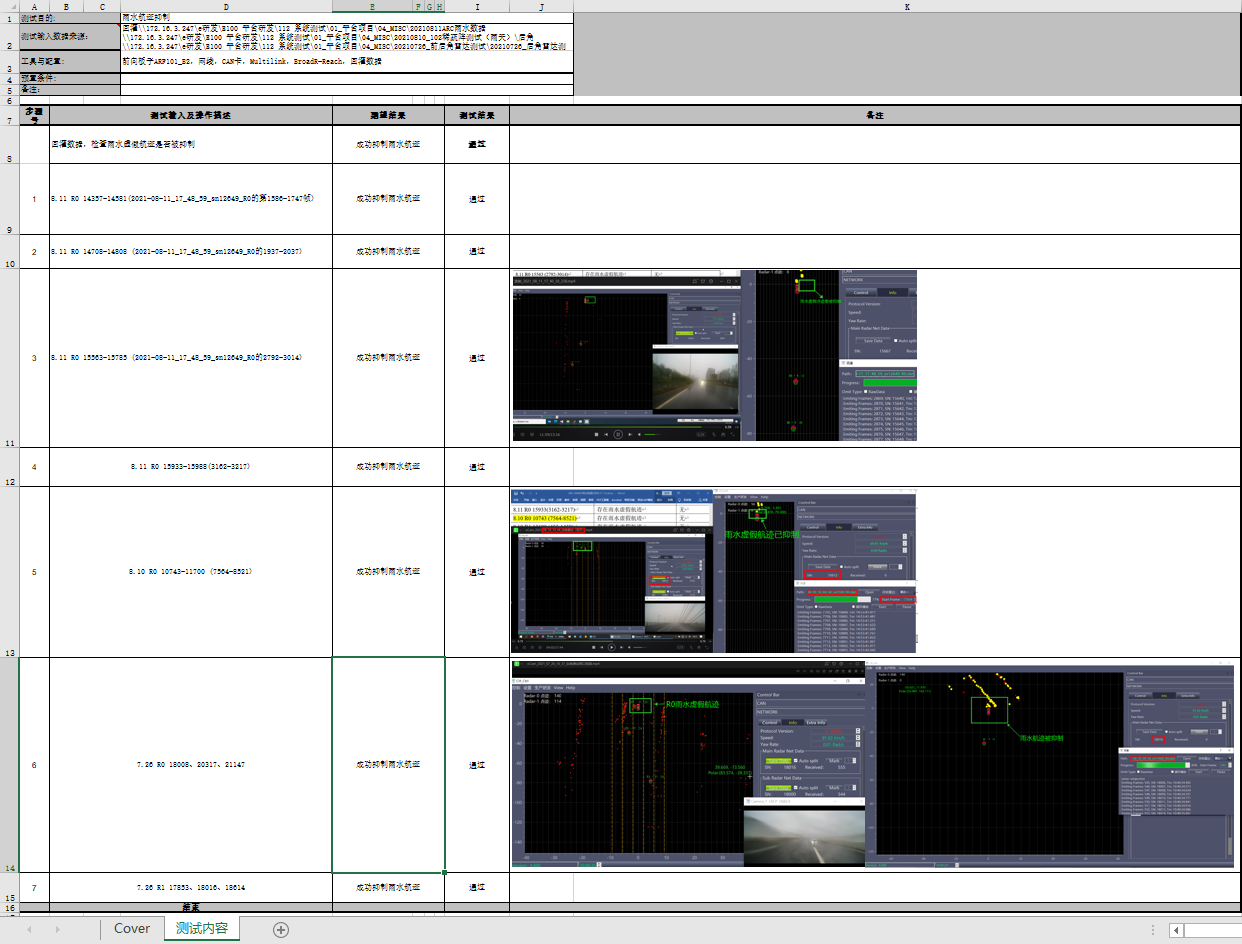
最后提交!~