https://www.kancloud.cn/aollo/aolloopencv/267591
(一)简单阈值
简单阈值当然是最简单,选取一个全局阈值,然后就把整幅图像分成了非黑即白的二值图像了。函数为cv2.threshold()
这个函数有四个参数,第一个原图像,第二个进行分类的阈值,第三个是高于(低于)阈值时赋予的新值,第四个是一个方法选择参数,常用的有:
• cv2.THRESH_BINARY(黑白二值)
• cv2.THRESH_BINARY_INV(黑白二值反转)
• cv2.THRESH_TRUNC (得到的图像为多像素值)
• cv2.THRESH_TOZERO
• cv2.THRESH_TOZERO_INV
该函数有两个返回值,第一个retVal(得到的阈值值(在后面一个方法中会用到)),第二个就是阈值化后的图像。
一个实例如下:
import cv2import matplotlib.pyplot as pltimg = cv2.imread('C:\Users\Administrator\Desktop\image\ll.jpg')gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)ret,thresh1 = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)ret,thresh2 = cv2.threshold(gray,127,255,cv2.THRESH_BINARY_INV)ret,thresh3 = cv2.threshold(gray,127,255,cv2.THRESH_TRUNC)ret,thresh4 = cv2.threshold(gray,127,255,cv2.THRESH_TOZERO)ret,thresh5 = cv2.threshold(gray,127,255,cv2.THRESH_TOZERO_INV)titles = ['img','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']images = [img,thresh1,thresh2,thresh3,thresh4,thresh5]for i in range(6): plt.subplot(2,3,i+1),plt.imshow(images[i],'gray') plt.title(titles[i]) plt.xticks([]),plt.yticks([])plt.show()
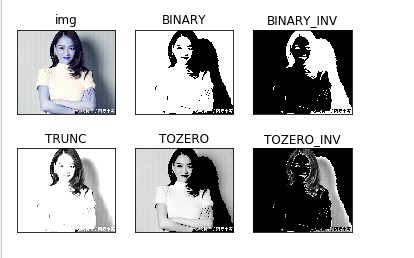
可以看到这里把阈值设置成了127,对于BINARY方法,当图像中的灰度值大于127的重置像素值为255.
(二)自适应阈值:
前面看到简单阈值是一种全局性的阈值,只需要规定一个阈值值,整个图像都和这个阈值比较。而自适应阈值可以看成一种局部性的阈值,通过规定一个区域大小,比较这个点与区域大小里面像素点的平均值(或者其他特征)的大小关系确定这个像素点是属于黑或者白(如果是二值情况)。使用的函数为:cv2.adaptiveThreshold()
该函数需要填6个参数:
- 第一个原始图像
- 第二个像素值上限
- 第三个自适应方法Adaptive Method:
— cv2.ADAPTIVE_THRESH_MEAN_C :领域内均值
—cv2.ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和,权 重为一个高斯窗口 - 第四个值的赋值方法:只有cv2.THRESH_BINARY 和cv2.THRESH_BINARY_INV
- 第五个Block size:规定领域大小(一个正方形的领域)
- 第六个常数C,阈值等于均值或者加权值减去这个常数(为0相当于阈值 就是求得领域内均值或者加权值)
这种方法理论上得到的效果更好,相当于在动态自适应的调整属于自己像素点的阈值,而不是整幅图像都用一个阈值。
一个实例如下:
import cv2import matplotlib.pyplot as pltimg = cv2.imread('C:\Users\Administrator\Desktop\image\ll.jpg')gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)ret,th1 = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)th2 = cv2.adaptiveThreshold(gray,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY,11,2) #换行符号 h3 = cv2.adaptiveThreshold(gray,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY,11,2) #换行符号 images = [gray,th1,th2,th3]plt.figure()for i in range(4): plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')plt.show()
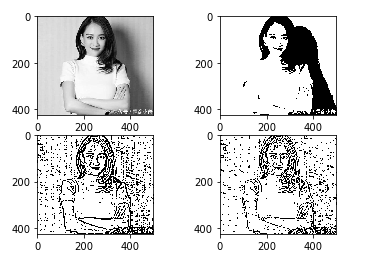
可以看到上述窗口大小使用的为11,当窗口越小的时候,得到的图像越细。想想一下,如果把窗口设置足够大以后(不能超过图像大小),那么得到的结果可能就和第二幅图像的相同了。
(三)Otsu’s二值化
我们前面说到,cv2.threshold函数是有两个返回值的,前面一直用的第二个返回值,也就是阈值处理后的图像,那么第一个返回值(得到图像的阈值)将会在这里用到。
前面对于阈值的处理上,我们选择的阈值都是127,那么实际情况下,怎么去选择这个127呢?有的图像可能阈值不是127得到的效果更好。那么这里我们需要算法自己去寻找到一个阈值,而Otsu’s就可以自己找到一个认为最好的阈值。并且Otsu’s非常适合于图像灰度直方图具有双峰的情况,他会在双峰之间找到一个值作为阈值,对于非双峰图像,可能并不是很好用。那么经过Otsu’s得到的那个阈值就是函数cv2.threshold的第一个参数了。因为Otsu’s方法会产生一个阈值,那么函数cv2.threshold的的第二个参数(设置阈值)就是0了,并且在cv2.threshold的方法参数中还得加上语句cv2.THRESH_OTSU。那么什么是双峰图像(只能是灰度图像才有),就是图像的灰度统计图中可以明显看出只有两个波峰,比如下面一个图的灰度直方图就可以是双峰图:

好了现在对这个图进行Otsu’s阈值处理就非常的好,通过函数cv2.threshold会自动找到一个介于两波峰之间的阈值。一个实例如下:
import cv2import matplotlib.pyplot as pltimg = cv2.imread('C:\Users\Administrator\Desktop\image\ll.jpg')gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#简单滤波ret1,th1 = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)#Otsu 滤波ret2,th2 = cv2.threshold(gray,0,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
print(ret2)plt.figure()plt.subplot(221),plt.imshow(gray,'gray')plt.subplot(222),plt.hist(gray.ravel(),256)#.ravel方法将矩阵转化为一维plt.subplot(223),plt.imshow(th1,'gray')plt.subplot(224),plt.imshow(th2,'gray')
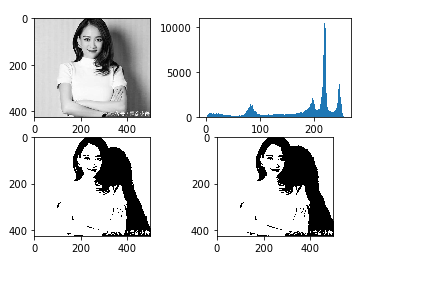
print(ret2) 得到的结果为144。可以看出似乎两个结果并没有很明显差别,主要是两个阈值(127与144)太相近了,如果这两个隔得很远那么会很明显的。
---------------------
作者:音量
来源:CNBLOGS
原文:https://www.cnblogs.com/yinliang-liang/p/9293310.html
版权声明:本文为作者原创文章,转载请附上博文链接!