本文的前提是已经安装好windows,没有安装就仿照第2点操作先在另外的电脑上制作启动盘,下载windows镜像到启动U盘即可
1、先在windows上分离出一个空白卷
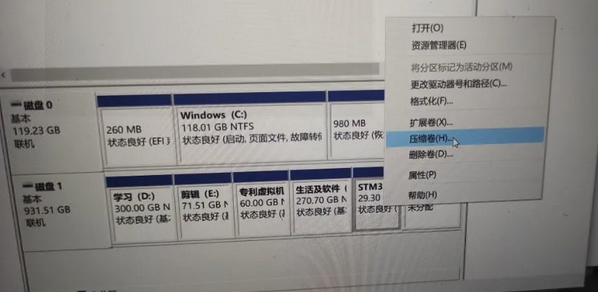
Windows下面 点击 此电脑,右键,然后选择管理

进入管理之后呢,我们选中一个分区,进行压缩卷,压出适当容量的空间给Ubuntu:
设置压缩卷的大小(按自己的情况设置)
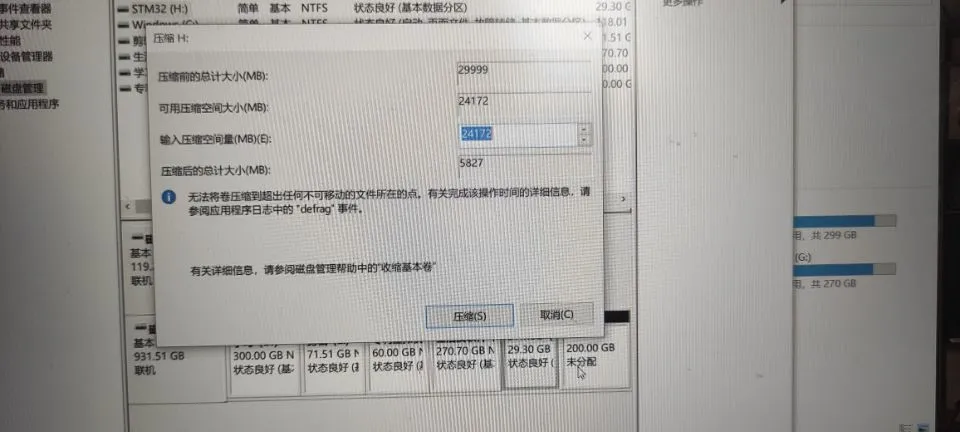
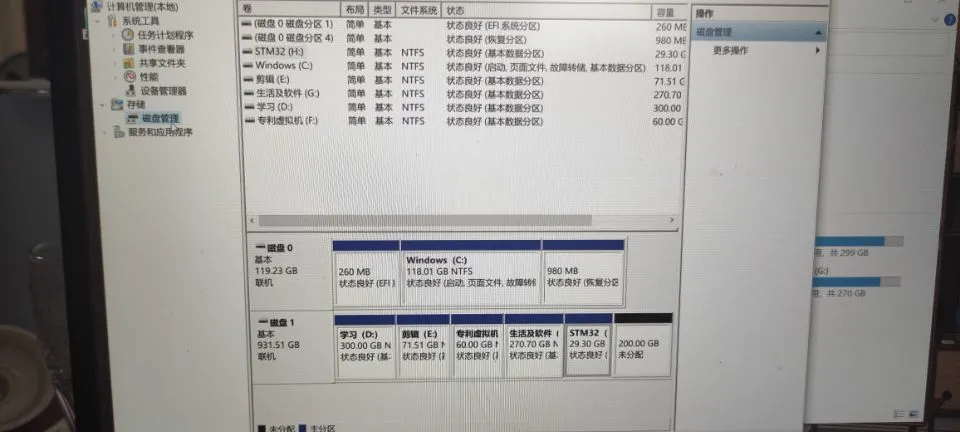
压缩完成之后(压缩完后不要对其进行格式化,就让他黑着,这方便后面双系统的安装。)
2、Download . Ventoy在这里下载Ventoy
Ventoy是一个制作可启动U盘的开源工具。有了Ventoy你就无需反复地格式化U盘,你只需要把 ISO/WIM/IMG/VHD(x)/EFI 等类型的文件直接拷贝到U盘里面就可以启动了,无需其他操作。
Ventoy 支持大部分常见类型的操作系统 (Windows/WinPE/Linux/ChromeOS/Unix/VMware/Xen ...)
下载压缩包后解压,运行Ventoy2Disk 如图所示:插上U盘,点击配置选项即可选择在U盘中安装Ventoy,完成启动盘的初始化

下载ubuntu镜像Ubuntu Releases
我下载的是16.04版本
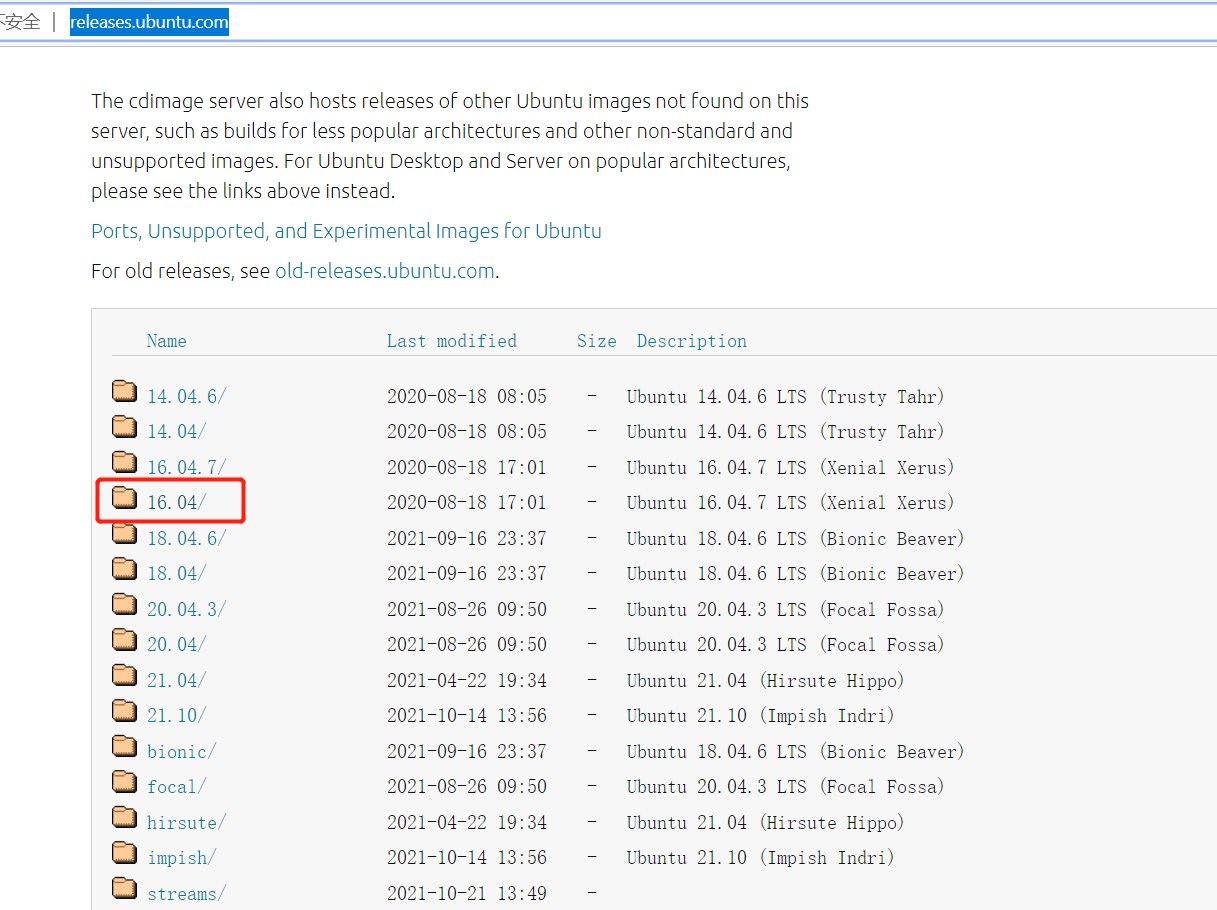
下载完后将镜像拷贝到制作好启动盘的U盘中
重启电脑进入bios 选择u盘启动

安装linux(选择自己要安装的镜像,和图中的不一定相同,你下载的哪个就选择哪个)
如果遇到Invalid Signature detected Check Secure Boot Policy 错误提示
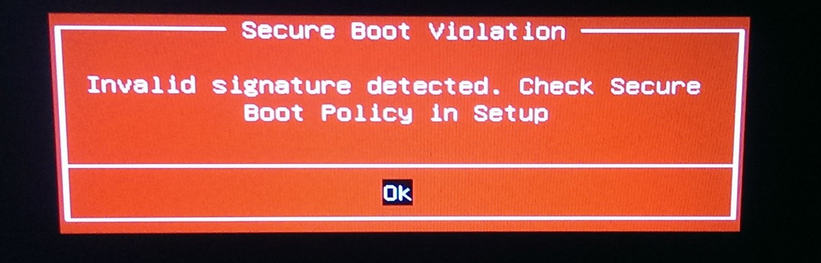
在bios中 ,找到 Security---secure boot control---设置为disable,按 F10 保存退出
前面几步都是选择语言,键盘布局啥的,重要的是到下面这一步
选择其他选项,还记得压缩好的卷吧,在这里找到它。
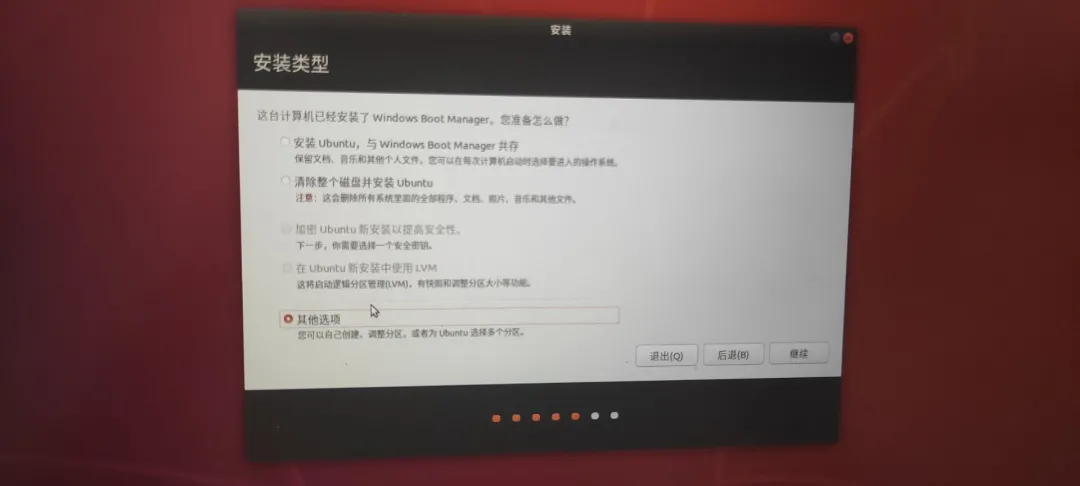
你压缩多少,这里就会有一个对应大小的空闲区

之后的操作就是和普通安装一样了
安装ROS 及key
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
安装ros-kinetic (可以根据自己的系统版本选择合适的ros版本)
安装slam-gampping
sudo apt update sudo apt-get install ros-kinetic-desktop-full sudo apt-get install ros-kinetic-slam-gmapping
sudo apt update sudo apt-get install ros-kinetic-desktop-full sudo apt-get install ros-kinetic-slam-gmapping
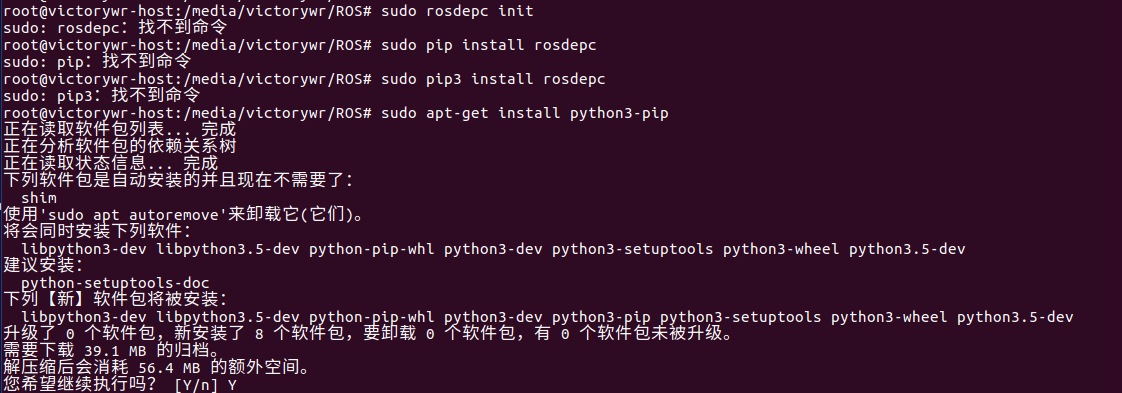
安装rosdepc
sudo pip3 install rosdepc
rosdep是ros的一个功能包,在安装ros时会自动安装.在使用时需要初始化.
ros包有两个不同类型的依赖项:build依赖项和run依赖项。rosdep就是用来检查包的丢失依赖项,并且完成下载和安装。
此命令会自动检测src下的所有包依赖,如果发现没有安装的依赖,直接安装。
rosdep是ros一个命令行,用于安装系统依赖,具体地说,就是ros包的依赖。举例来说,你在编译velodyne源码时,可能会遇到找不到pcap.h错误,这是因为velodyne依赖于pcap库,但是这个库没有安装,此时你就可以使用rosdep安装pcap库
上面指令可能执行提示 找不到指令:如下
输入 Y,先安装python 即可
sudo rosdepc init
按提示更新: rosdepc update
添加环境变量:一般ros安装在opt目录下
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
运行roscore
roscore
如下是运行成功的log

安装rosinstall (后续用于安装ROS功能包程序)
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
测试小海龟
1、安装turtlesim
apt-get install ros-kinetic-turtlesim
2、运行 roscore
3、打开另一个终端 运行 rosrun turtlesim turtlesim_node
4、再打开一个终端运行 rosrun turtlesim turtle_teleop_key
如下:
小海龟在键盘控制下移动轨迹生成
