前面我已经把PetaLinux成功安装到了Ubuntu虚拟机当中了,接下来就要实际操作,将PetaLinux移植到我们自己的硬件平台当中去。
step1:硬件描述文件
有两种PetaLinux工程建立的方法,一种是下载官方开发板的BSP包并安装,一种就是针对自己的硬件平台去剪裁Linux功能以适应自己的需求。
第一种,比较简单,官方提供了完整的demo和已经预编译好的各种文件。
比如说我们从网上下载了Avnet-Digilent-ZedBoard-v2015.4-final.bsp,我们直接执行下面的命令就可以安装这个BSP包了。安装完成后,PetaLinux工程就安装在了Avnet-Digilent-ZedBoard-v2015.4-final文件夹下面。可以选择自己重新编译,或者直接使用预编译好的文件直接拷贝到SD卡中,马上就能够在ZedBoard上运行PetaLinux了。
petalinux-create -t project -s ./Avnet-Digilent-ZedBoard-v2015.4-final.bsp
第二种,根据我们自行设计的硬件平台去创建PetaLinux工程。这就稍微复杂一些了,需要进行各种配置,我也是尝试了各种配置方法,最终获得了一个基本上满足我需求的结果。
选用的芯片是ZYNQ系列的芯片,我们将会在内部的ARM硬核上去跑Linux。
首先,为了让PetaLinux正常的运行,需要分配一些硬件外设资源给PetaLinux,文档ug1144中也说明了PetaLinux中对Zynq-7000系列FPGA硬件资源的需求。若用到了MicroBlaze或者Zynq Ultrascal+ MPSoC的话,自己查看文档说明吧。
1.TTC模块(必须) #如果多个TTC都使用了的话,Linux内核将会使用第一个TTC模块。 2.外部32MB存储空间(必须) 3.UART模块(可选,控制台打印信息用) #如果用UART IP模块的话,如AXI UART,需要确保中断信号有连接到PS 4.非易失存储器(可选) #如QSPI Flash,SD/MMC 5.以太网接口(可选) #若果用Ethernet IP模块或外部PHY的话,需要确保中断信号连接道PS
知道这些后,我们在Vivado中设计硬件平台时需要预留好上述模块就可以了。Vivado设计,综合,实现后,我们在Vivado中使用“Export Hardware”输出PetaLinux需要的硬件描述文件。
输出的文件都在“/<vivado project>/<project name>.sdk/<top module name>_hw_platform_0”文件夹下。
如果我们使用的是Windows版本的Vivado,我们就需要把“***_hw_platform_0”这个文件夹拖到Linux虚拟机当中去。如果使用Linux版本的Vivado,之后直接定位到这个文件夹就可以了。
step2:创建PetaLinux工程
接下来就能够根据这些硬件描述文件,来创建基于我们自己的硬件平台的PetaLinux工程了。
首先,创建一个PetaLinux工程目录。执行命令:
#创建工程,针对Zynq芯片,工程名称ifc_petalinux petalinux-create --type project --template zynq --name ifc_petalinux
创建成功后,在ifc_petalinux目录下将包含2个文件夹和一个文件,如下所示。

接着,我们来引用刚才输出的硬件描述文件。执行命令:
petalinux-config --get-hw-description=/home/xilinx-arm/PetaLinux/ifc_v1_0/ifc_hw_description/IFC_TOP_wrapper_hw_platform_0
因为是空工程,我们会进入一个配置界面。在里面我们可以配置一些系统参数,主要的配置包括:启动方式,启动存储器分区表,启动文件名称等等。
这里我们仅需要修改两个启动方式选项即可。boot和kernel的存储位置,都选到QSPI Flash即可。配置如下:
#Subsystem AUTO Hardware Settings ---> # Advanced bootable images storage Settings ---> # boot image settings ---> # image storage media ---> choose primary flash # kernel image settings ---> # image storage media ---> choose primary flash
这里要说明一下,因为我自己的板子上包含了QSPI Flash、eMMC、USB,而没有SD卡、以太网。
所以非常尴尬,不能通过简单的SD卡复制文件去进行系统boot,必须通过JTAG下载BOOT.bin和image.ub文件。非常非常的e'xin!!下载两个文件就要下载好久,这也导致我每次尝试都花费大量时间在下载Flash上。
所以在这里,建议大家一定要在设计板子的时候尽量留好SD卡的位置,或者就算留上几个测试点飞线出来也好,对开发来说肯定会提供很多方便。
回到正题,配置完成后,按ESC并选择YES保存配置。系统就自动进行配置了,配置成功的打印信息如下:

为了方便我们之后复制和修改文件,执行命令:
chmod -R 777 ../ifc_petalinux/
step3:内核配置
因为硬件平台没有SD卡和网口,尴尬的我很难复制文件。想了个办法,就是通过U盘去复制文件,所以我需要把USB配置一下,让系统能够识别出U盘,并进行读写操作。而且以后可能用到USB摄像头,就顺便把这个功能也打开吧。参考网址:http://www.wiki.xilinx.com/Zynq+Linux+USB+Device+Driver
配置kernel,执行命令:
petalinux-config -c kernel
打开了kernel的配置界面,
USB的配置如下:
#Device Drivers ---> # USB support ---> # <*> Support for Host-side USB # <*> OTG support # <*> EHCI HCD (USB 2.0) support # <*> USB Mass Storage support # <*> ChipIdea Highspeed Dual Role Controller # <*> ChipIdea host controller # <*> ChipIdea device controller # USB Physical Layer drivers ---> # <*> NOP USB Transceiver Driver ####!!!在2015.4中不用打开这个 # <*> USB Gadget Support # <M> USB Gadget Drivers # <M> USB functions configurable through configfs # [*] Mass storage
上面都是按照OTG功能来配置的,但我暂时没有OTG的转接线,没法调试不敢确认是否能用,所以我们最后在设备树中只开启host功能。
其实除了“NOP USB Transceiver Driver”是默认没有打开,剩下都是默认打开的,我最终根据自己的配置并没有打开这个选项!!!
USB摄像头配置如下:
#Device Drivers ---> # Multimedia Support ---> # Media USB Adapter ---> # <*>USB Video Class (UVC) (also UVC Input Event Support) #打开 # USB Support ---> # < >USB 2.0 OTG FSM Implementation #关闭
配置完成后,ESC并保存。
step4:设备树配置
我设计的板子是参考ZYBO开发板的,usb phy上有一个reset引脚连接到了PS的MIO46管脚上。
需要在设备树中告诉系统。
设备树文件都在目录 ./subsystems/linux/configs/device-tree 底下
首先修改pcw.dtsi文件:(在最下面的问题二中,解决了usb reset的问题。按照解决方法配置好后,就不用修改pcw.dtsi文件了,它能够自动生成!)
gedit subsystems/linux/configs/device-tree/pcw.dtsi
#在&usb0上增加一行usb-reset = <&gpio0 46 0>;
#最后如下:
&usb0 {
dr_mode = "host";
phy_type = "ulpi";
status = "okay";
usb-reset = <&gpio0 46 0>;
};
接着修改system-top.dts文件:
gedit subsystems/linux/configs/device-tree/system-top.dts
#可以看到里面基本是空的
#在里面增加以下内容
&qspi {
flash0: flash@0 {
compatible = "micron,n25q128a11";
};
};
/{
usb_phy0: usb_phy@0 {
compatible="ulpi-phy"; ###假如前面的kernel配置中打开了“NOP USB Transceiver Driver”,需要配置为compatible="usb-nop-xceiv";
#phy-cells = <0>;
reg = <0xe0002000 0x1000>;
view-port=<0x170>;
reset-gpios = <&gpio0 46 1>;
drv-vbus;
};
};
&usb0 {
status = "okay";
dr_mode = "host";
usb-phy = <&usb_phy0>;
};
其中QSPI Flash我用到型号是N25Q128A11EF740E,所以要在这个设备树中说明。而USB配置为host模式,并打开VBUS电源。
step5:编译和下载程序
终于,配置完成了,接下来就可以愉快的编译了,执行命令:
petalinux-build
编译成功log:

最终在./images/linux文件夹下,就能够找到我们需要的各种文件了。
我们需要的四个文件是:
zynq_fsbl.elf #FSBL可执行文件 IFC_TOP_wrapper.bit #FPGA配置bit文件 u-boot.elf #SSBL可执行文件 image.ub #linux镜像文件
由于我没有在Linux虚拟机中安装Vivado,所以我没有办法使用“petalinux-package”命令。
因此我将这四个文件拖到Windows中进行处理,
在Windows中打开Xilinx SDK,选择 Xilinx Tools->Create Boot Image,可以参考一下官方手册,
分别按顺序加入 zynq_fsbl.elf--->IFC_TOP_wrapper.bit--->u-boot.elf 三个文件。点击 Create Image 按钮,生成BOOT.bin文件。
因为我的系统中没有SD卡,而且一开始就配置为了QSPI FLASH启动的方式,在Xilinx SDK中选择 Xilinx Tools->Program Flash。
Image File选择刚才生成的BOOT.bin文件,Flash Type选择qspi_single,Offset填写0,点击Program按钮。烧录完成后,我们的FSBL,bit,SSBL就成功下载到QSPI Flash中去了,我们就已经可以实现u-boot的启动了,但是还不能引导kernel。
接下来烧录image.ub文件,因为Image File只能选择.bin或者.mcs文件,所以需要把image.ub重新命名为image.ub.bin,好像有点粗暴。。。
然后Offset需要填写偏移地址,这个地址可以通过petalinux-config配置,或者可以通过system-config.dtsi文件查看。内容如下:
&qspi {
#address-cells = <1>;
#size-cells = <0>;
flash0: flash@0 {
compatible = "micron,n25q128";
reg = <0x0>;
#address-cells = <1>;
#size-cells = <1>;
spi-max-frequency = <50000000>;
partition@0x00000000 {
label = "boot";
reg = <0x00000000 0x00500000>;
};
partition@0x00500000 {
label = "bootenv";
reg = <0x00500000 0x00020000>;
};
partition@0x00520000 {
label = "kernel";
reg = <0x00520000 0x00a80000>;
};
partition@0x00fa0000 {
label = "spare";
reg = <0x00fa0000 0x00000000>;
};
};
};
可以看到kernel的偏移地址是0x00520000,所以Offset就填写这个数值。点击Program烧录。
最终,我们通过跳线方式将板子的启动方式配置为QSPI Flash,上电,启动~~~~
我们的PetaLinux就成功运行了~~~~哈哈哈哈
运行后插入了USB Hub和U盘,成功挂载!之后传输文件或者更新BOOT.bin和image.ub就可以用U盘复制了,JTAG下载flash的方式实在是太慢了!
Log打印没有截图,有空了copy一下。先留个位置。
log信息
需要做PetaLinux版本控制时,需要备份如下几个文件夹内的所有文件:
• "<plnx-proj-root>/.petalinux" • "<plnx-proj-root>/build/" • "<plnx-proj-root>/images/"
需要注意的问题:
1.假如在FPGA中用到了VDMA模块,在编译时会提示有错误出现。
原因是VDMA的中断编号有错误,我的处理方法是在pl.dtsi设备树文件中,把每个VDMA模块里的MM2S,S2MM通道的interrupt=-1那两行直接删除,这样就能够成功编译了。但是有什么影响我就不知道了。以后再研究吧。
2.在petalinux-config配置完成后,提示类似No USB reset found, No ethernet reset found类似的警告。
一直以为是设备树的问题,最后发现原来是在Vivado中Zynq系统配置时,没有设置Reset对应的MIO管脚。配置好后就不需要修改pcw.dtsi文件了。如下图,配置了USB的Reset为MIO46。
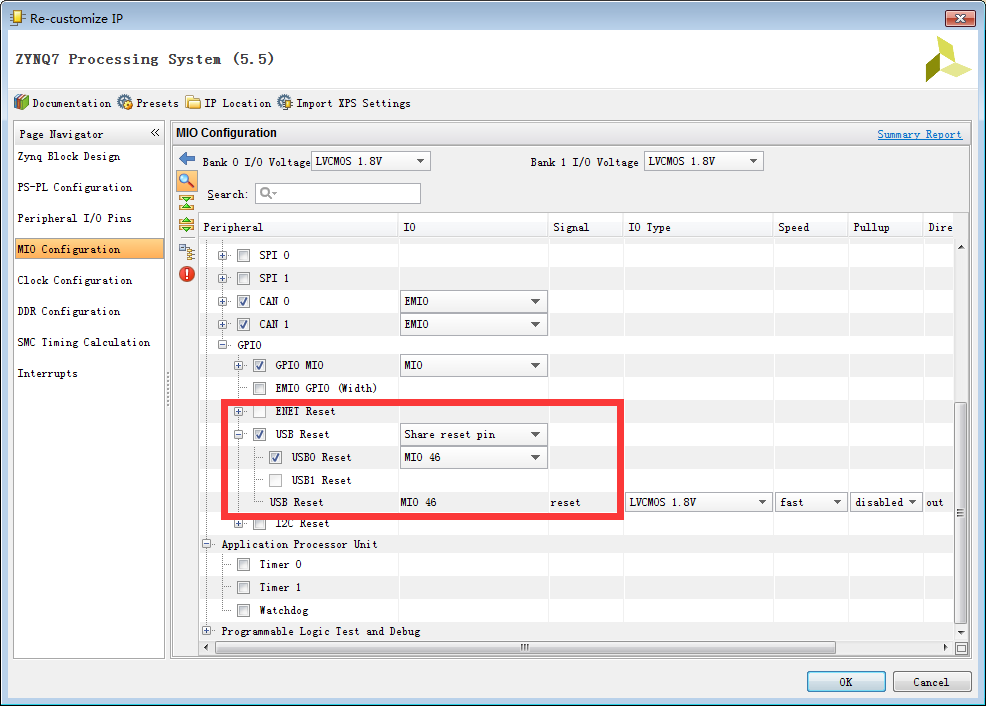
配置这个后,当调用 petalinux-config --get-hw-description=/*** 命令时,就会自动在pcw.dtsi文件中生成“usb-reset = <&gpio0 46 0>;”这段描述了。
3.USB HOST模式,USB PHY的CPEN不使能电源,导致不能向外供电。
由于我使用的是2015.4的PetaLinux,这个bug已经被修复了。在之前的版本会出现这个现象,大致原因就是就算配置设备树成host模式,系统仍然按otg方式配置了USB。
问题描述的网址:
https://forums.xilinx.com/t5/Embedded-Linux/Petalinux-2015-2-1-usb-not-working/td-p/654349
http://zedboard.org/content/using-petalinux-configure-zedboard%EF%BC%8C-usb-otg-can-not-work解决方法就是在petalinux中安装一个app,每次启动时候运行脚本强制打开USB。也可以手动打开,针对usb0,执行命令:devmem 0xe0002170 32 0x600a0067
补丁网址:https://forums.xilinx.com/xlnx/attachments/xlnx/ELINUX/14090/1/force_usb_power.tar.gz
app的安装方法参考ug1144,执行的命令大致包括:
mkdir ./components/apps/force_usb_power #复制force_usb_power.sh, Kconfig, Makefile, README四个文件到文件夹下 petalinux-config -c rootfs #进入Applications ---> 使能force_usb_power应用 petalinux-build -c /rootfs/force_usb_power petalinux-build -c /rootfs/force_usb_power petalinux-build -x package #得到了打了补丁的image.ub文件