本文介绍了PMSM的转子初始位置的各种情况;
1 什么是转子的初始位置?
其实转子的初始位置是不确定的,但是在电机启动的时候,我们需要得到电角度,这样才可以进行矢量控制;所以,这里将转子与A轴重合作为初始位置,此时电角度也恰好为零,具体如下图所示;

)
至于原理下面会详细分析,这样在转子到初始位置后,也可以得到准确的电角度,就可以实现磁场和转子的同步转动。
2 如何让转子运行到初始位置?
其实这是一个很简单的问题,在这里我将它放大了,简单地分析了一下推导了一下,首先我们期望的结果是转子和A轴重合,准确地说是转子磁链和A轴重合。
之前在分析单电阻采样,对不同时刻的转子位置,处于不同的扇区时,电流的状态做了简单的分类讨论,首先看下图;
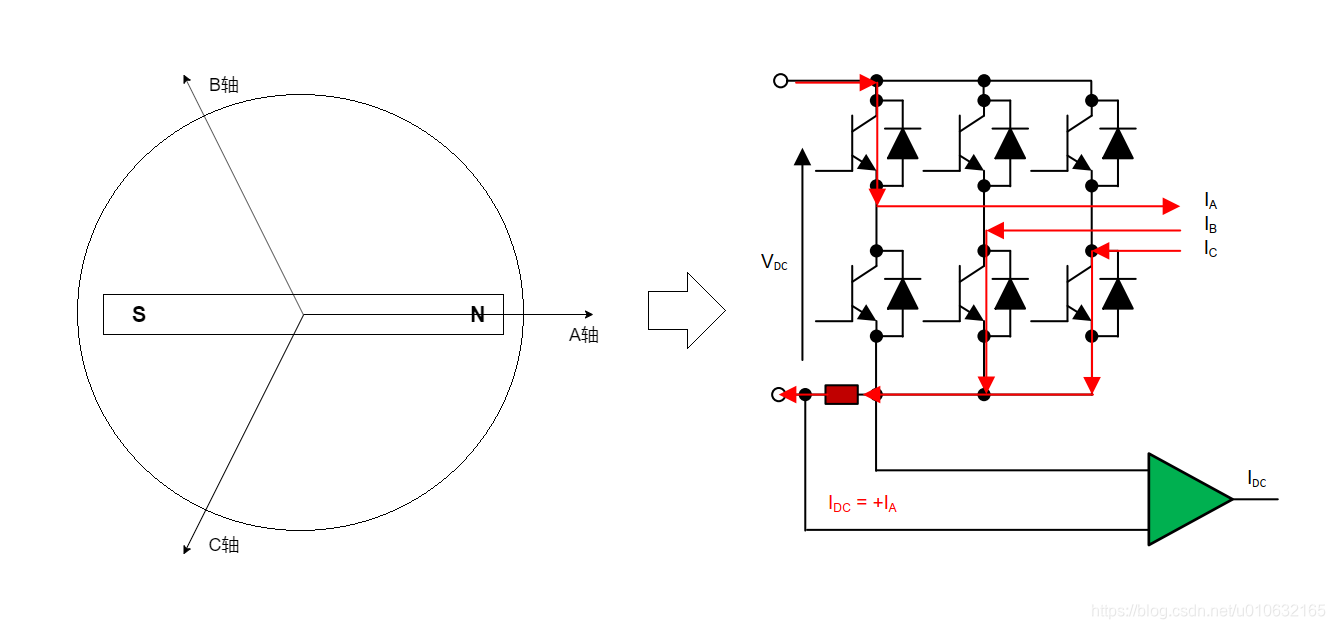
显然,当转子磁链与A轴重合的时候,逆变器的开关状态为:
SA:SB:SC—1:0:0
这里规定上管打开,下管关闭的时候,SA=1;上管关闭,下管打开的时候,SA=0
因此可以得到
IA=IDCIC=IB=−2IDC
静止坐标系αβ,α轴的电流分量为iα,iβ,则Clark变换满足以下公式:
iα=iAiβ=31∗iA+32∗iB
所以根据Clark变换公式可以得到:
iα=IA=IDCiβ=31∗IA+32∗IB=31IDC−31IDC=0
根据park变换:
id=iα∗cosθ+iβ∗sinθiq=−iα∗sinθ+iβ∗cosθ
因为当前电角度为零,所以将 IA=IDC,IB=0,θ=0 代入park变换的公式中,最终得到;
id=IDCiq=0
所以可以设置id=IDC,iq=0;然后通过park反变换得到Uα,Uβ输入到SVPWM,就可以将转子驱动的和A轴重合的位置。
ipark_parameter.Ds = 0;
ipark_parameter.Qs = 20000;
ipark_parameter.Angle = 0;
ipark_calc(&ipark_parameter);
sv.Ualpha = ipark_parameter.Alpha;
sv.Ubeta = ipark_parameter.Beta;
svpwm_calc(&sv);
svpwm_update(ipark_parameter.Qs, &sv);
以上代码是实际测试中使用的,20000是电流的Q格式,最终可以实现预期的效果。
那么,如果iq=IDC;id=0;θ=0;转子会出现什么样的情况呢?
3 iq=IDC;id=0;θ=0
因为存在机械角度和电角度存在:电角度=机械角度*极对数;
所以如果电机极对数为1时:转子磁链与A轴夹角的机械角度为90°

所以如果电机极对数为2时:转子磁链与A轴夹角的机械角度为45°
