如果本文帮到了你,帮忙点个赞;
如果本文帮到了你,帮忙点个赞;
如果本文帮到了你,帮忙点个赞;
HPF 一阶RC高通滤波器详解(仿真+matlab+C语言实现)
LPF 一阶RC低通滤波器详解(仿真+matlab+C语言实现)
预备知识
高通滤波器(HPF-high pass filter)可以滤除频率低于截止频率的信号,类似的还有低通滤波器,带通滤波器,带阻滤波器。一阶RC高通滤波器的电路如下图所示;

关于电容
首先对电容的几个公式做一下补充;
电容大小满足;
其中 是电容所带的电荷量, 是电容两端的电势差;
另外,电流相当于单位时间流过导体的电荷量;因此电流 满足;
根据①,②可以得到电容大小 和电容的电流 以及两端电压 的关系;
HPF的推导
由以上电路可知,假设电流为 ,则可知
电容两端的电压为 根据基尔霍夫定律,满足;
所以结合①,③,④可以得到;
根据 ③,④,⑤ 可以得到以下关系;
将方程进行离散化,如果输入和输出输入按照 的时间采样,那么可以将输入和输出序列化,则
序列化为:
序列化为:
根据⑥式可以进行离散化,因此最终滤波输出的序列 如下所示;
将⑦再进一步简化得到;

其中
所以换成得到;
另外截止频率和低通滤波器的相同;
将⑧式代入可以得到截止频率和 的关系;
这个公式便于简化后面程序以及截止频率的计算。
simulink 仿真
这里根据公式⑥构建simulink的子模块subsystem;
具体如下所示;

整体的仿真如下图所示;

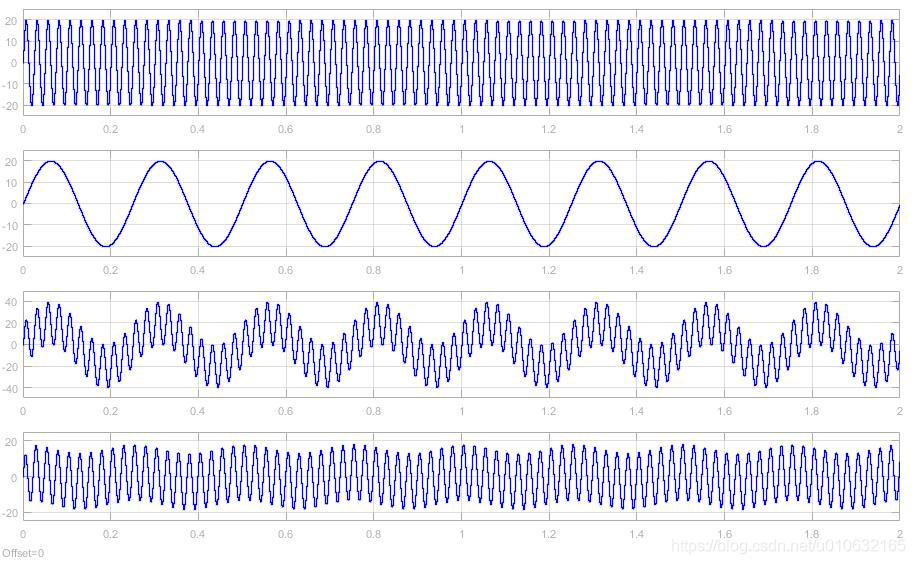
其中Sine Wave频率设置为2*pi*40,频率为40赫兹;

其中Sine Wave1频率设置为2*pi*4,频率为4赫兹;

所以这里需要使得2*pi*4的信号衰减,所以根据,截止频率 的计算公式,可以改变增益的值,具体如下所示;
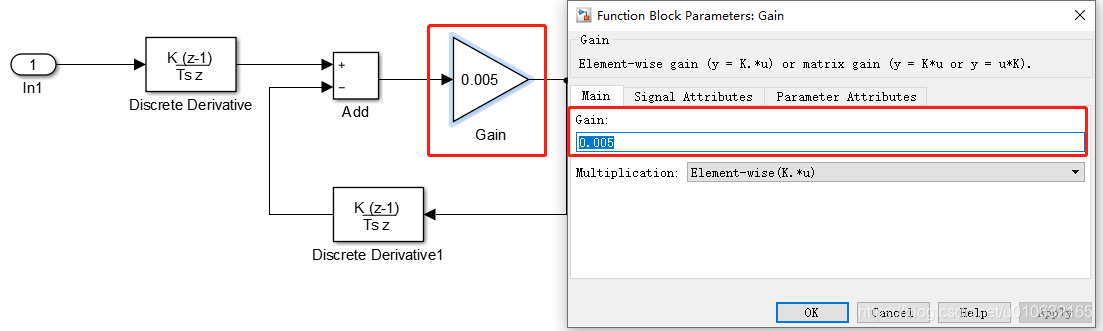
这里RC增益为0.005,因此
simulink 运行结果
matlab 实现
matlab根据以下这个公式进行数字滤波器的设计;
另外 的值如何确定需要参考⑧式;
Serial = 0:0.1:100;
Fs = 1;
Phase = 0;
Amp = 1;
N0 = 2*pi*Fs*Serial - Phase;
X0 = Amp*sin(N0);
subplot(4,1,1);
plot(X0);
Fs = 0.02;
N1 = 2*pi*Fs*Serial - Phase;
X1 = Amp*sin(N1);
subplot(4,1,2);
plot(X1);
X2=X0+X1;
subplot(4,1,3);
plot(X2);
len = length(X2);
X3=X2;
p=0.75;
for i=2:len
X3(i) = p*X3(i-1)+p*(X2(i)- X2(i-1))
end
subplot(4,1,4);
plot(X3);
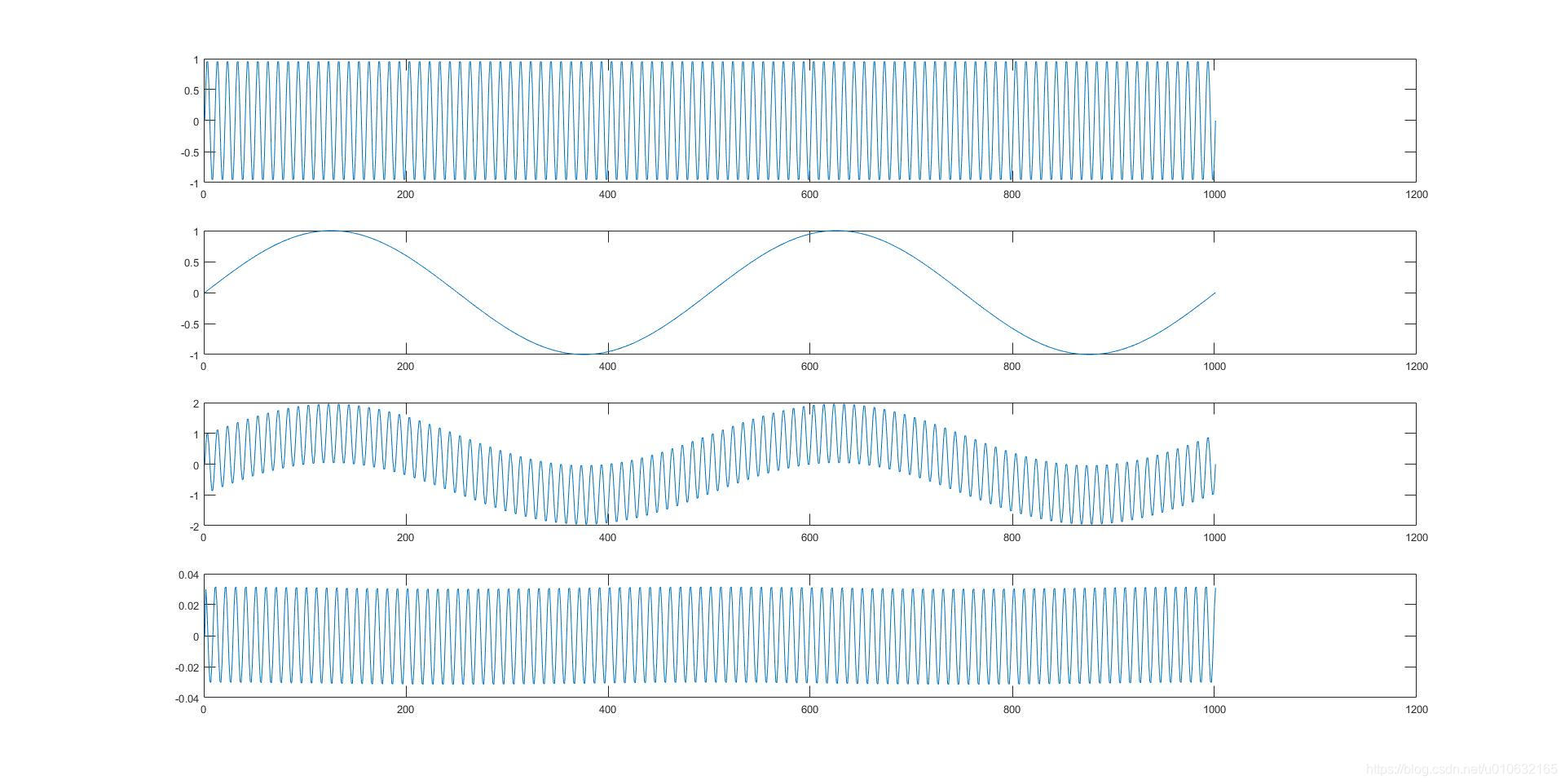
简单地分析一下,代码中的X1,X2,X3;
- X1频率为
1 - X2频率为
0.02
因此可以得到截止频率如下;
matlab 运行结果
C语言实现
typedef struct
{
int16_t Input[2];
int16_t Output[2];
int32_t FilterTf;
int32_t FilterTs;
int32_t Ky;
} high_filter;
void high_filter_init(high_filter *v);
int16_t high_filter_calc(high_filter *v);
其中;
FilterTs为采样时间 ;FilterTf为RC时间常数;Input[0]表示 ;Input[1]表示 ;Output[0]表示 ;Output[1]表示 ;Ky表示;
参考公式如下所示;

void high_filter_init(high_filter *v){
v->Ky = v->FilterTf*1024/(v->FilterTs + v->FilterTf);
}
int16_t high_filter_calc(high_filter *v){
int32_t tmp = 0;
tmp = ((int32_t)v->Ky*v->Output[1] + v->Ky*(v->Input[0] - v->Input[1]))/1024;
if(tmp>32767){
tmp = 32767;
}
if( tmp < -32768){
tmp = -32768;
}
v->Output[0] = (int16_t)tmp;
v->Output[1] = v->Output[0];
v->Input[1] = v->Input[0];
return v->Output[0];
}