平台:迅为IMX6Q开发板
配件:lora模块
系统:Linux系统
Lora 内核配置
本小节我们将在非设备树源码中进行 Lora 内核配置。 Android4.4 源码是非设备树内核的源码,
Linux 和Android 共用一套源码,
所以我们使用 Android4.4
源码即可。
1 打开
Android4.4
内核源码, 我们使用以下命令编辑 board-mx6q_topeet.c 文件。
cd
kernel_imx/vi arch/arm/mach-mx6/board-mx6q_topeet.c
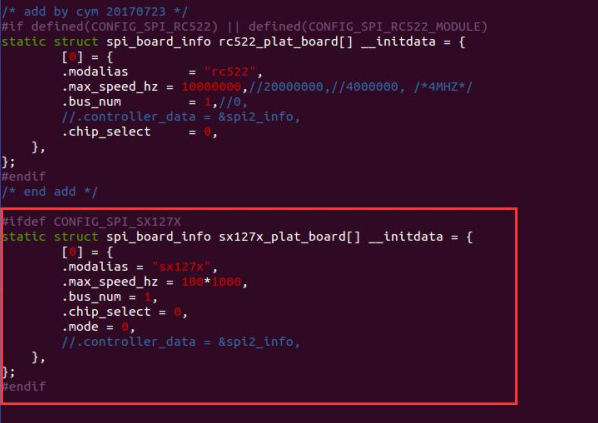
查找“522” , 在后面添加代码:
#ifdef
CONFIG_SPI_SX127X
static struct spi_board_info sx127x_plat_board[] __initdata = {
[0] = {
.modalias = "sx127x",
.max_speed_hz = 100*1000
.bus_num
= 1,
.chip_select = 0,
.mode = 0,
//.controller_data = &spi2_info,
},
};
#endif
修改完如下图所示:
2
然后继续查找“522” , 后面添加如下代码
#if
defined(CONFIG_SPI_SX127X)
spi_register_board_info(sx127x_plat_board,
ARRAY_SIZE(sx127x_plat_board));
#endif
3
查找“TOPEET_ECSPI2_CS0” 并将其值修改为 NULL, 如下图所示。
保存后退出。
4 将驱动文件 sx127x.c 通过 ssh 传到内核目录下的“drivers/spi/” 下, 如下图所示。

5 使用命令“vi Makefile” , 在最后添加如下代码
obj-$(CONFIG_SPI_SX127X) += sx127x.o
如下图所示, 修改完保存退出。
6
使用命令“vi
Kconfig” ,
在最后添加代码:
config
SPI_SX127X
tristate "SX127X Module driver support"
depends on EXPERIMENTAL
help
This supports SX127X Module drivers.
#end add
修改完如下图所示。
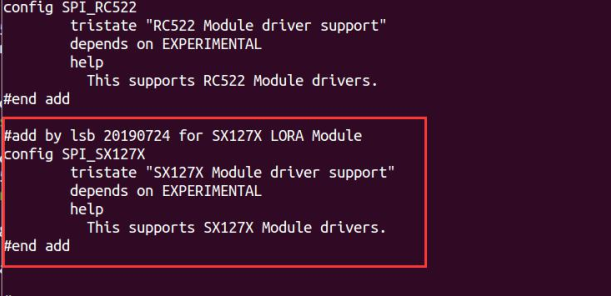
保存退出。
7 回到源码目录。 使用以下命令配置内核
cp -r
config_for_iTOPiMX6_linux .config
export
ARCH=arm
make menuconfig
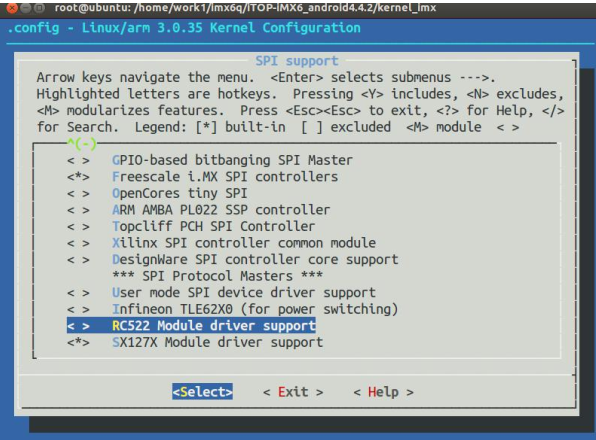
8
在 menuconfig 的配置界面, 配置 lora,取消配置 rc522
-> Device Drivers
-> SPI support (SPI [=y])
选择“SX127X
Module driver support” , 取消选择“RC522 Module driver support” 。 如下图所示。
9
保存退出后, 回到内核源码目录下,
使用以下命令
cp -r
.config config_for_iTOPiMX6_linux
./build_android.sh qt
编译内核, 烧写“uImage” 内核镜像。
编译完以后, 重新烧写内核镜像到开发板。
应用程序编写
在测试例程中, 我们要用俩个开发板通过
lora 通信控制对方开发板上的 led 的亮灭。 我们将配置资料中的测试程序 lorares.c 拷贝 Ubuntu 上, 输入以下的命令编译可执行文件
arm-none-linux-gnueabi-gcc
-o lorares lorares.c -static
编译完生成可执行程序 lorares, 将 lorares 通过 U 盘拷贝到开发板的/usr/bin 目录下, 在下一小节我们将进行测试。
测试
lora
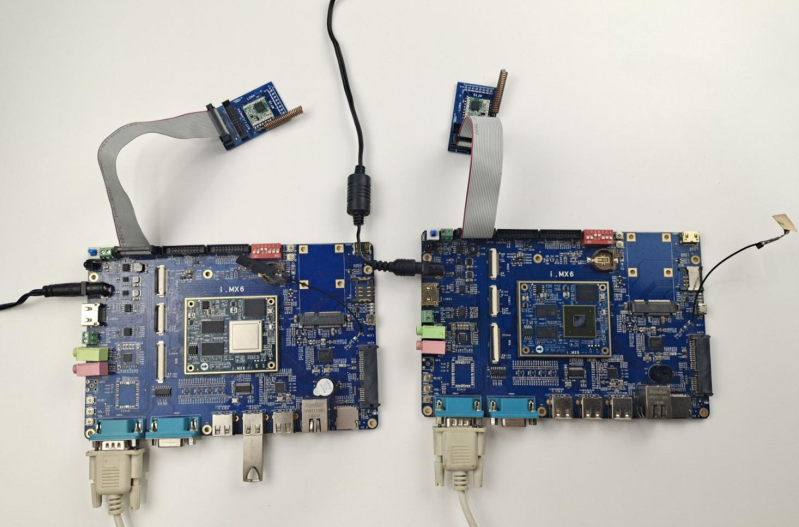
1 在测试之前我们要连接好硬件,
我们将 Lora 模块连接开发板
GPIO 座子。
连接好硬件, 如下图所示:
2
在上一小节, 我们编译好了可执行程序
lorares, 我们将 lorares 分别拷贝到俩个开发板的/usr/bin 目录下。
3 俩个开发板分别连接串口终端, 如下图所示:
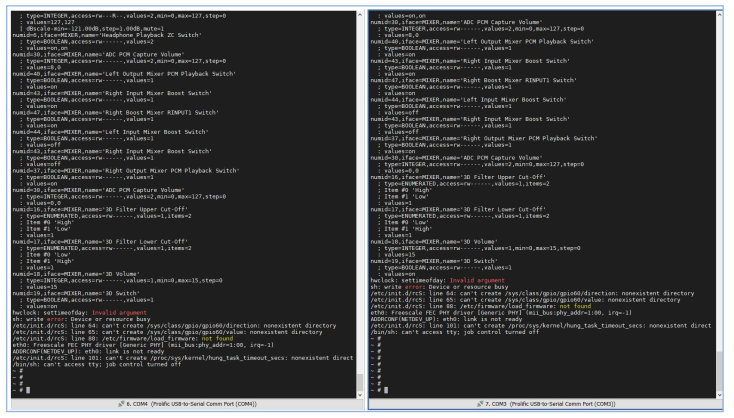
4
在左边的串口终端输入以下命令接收,
第一个参数 0
代表接收模式
cd
/usr/bin/lorares 0
5
在右边的串口终端输入以下命令发送,
第一个参数 1
代表发送模式, 第二个参数代表
led 的状态,为 1 代表 led 灯亮, 为 0 代表 led 灯灭
cd
/usr/bin/lorares 1 1
6 在俩个开发板的串口终端分别运行命令,
如下图所示:

接收端的开发板的 led 灯也变亮了, 如下图所示: