该方法也是一种路径规划算法,不过障碍物过多的时候建立势场可能比较耗时,而且容易陷入局部最优。
算法流程如下:
1. 对于栅格场景中每一个像素分别计算到终点的距离,距离越大,则对该像素赋值越大,结束得到引力场。
2. 对于栅格场景中每一个像素分别计算到所有障碍物的距离,距离越大,则对该像素赋值越小,结束得到斥力场。
3. 引力场和斥力场相加得到总人工势场。
4. 得到人工势场后,从起始位置用梯度下降或者邻域搜索法找到一条路径到结束点。
这里建立势场只用到了障碍物最外层边界,如果障碍物所有像素全部用来计算,太过于耗时了。路径寻找用了邻域搜索。
matlab代码如下:
clear all; close all; clc; img = imread('map.png'); imshow(img); [h,w] = size(img); img1 = 255-(img-imerode(img,ones(3))); %求边界 figure; imshow(img1); p = ginput(); hold on; plot(p(:,1),p(:,2),'r.') grav = zeros(h*w,1); %引力场 repu = zeros(h*w,1); %斥力场 ind=zeros(h*w,2); indobs=zeros(sum(sum((255-img1)>0)),2); num = 1; for i=1:h for j=1:w ind((i-1)*w+j,:) = [j i]; if img1(i,j) ==0 indobs(num,:)=[j i]; num = num + 1; end d = norm([j,i]-p(2,:)); %根据距离判断,距离越小,值越小 grav((i-1)*w+j) = 2*d; %建立引力场,2是引力系数 end end for i=1:length(indobs) t = ind - repmat(indobs(i,:),length(ind),1); %根据距离判断,距离越小,值越大 repu = repu + 5./sqrt(t(:,1).^2+t(:,2).^2); %建立斥力场,5是斥力系数 end repu(repu>500) = 500; re = grav + repu; %综合场 imgre = reshape(re,[h,w])'; nei=[ -1 -1; -1 0; -1 1; 0 -1; 0 0; 0 1; 1 -1; 1 0; 1 1]; path=floor(p(1,:)); pre = [0 0]; while norm(path(end,:)-p(2,:))>2 pc = path(end,:); im = imgre(pc(end,2)-1:pc(end,2)+1,pc(end,1)-1:pc(end,1)+1); [~,ind] = min(reshape(im,9,1)); %八邻域找最小值 pre = path(end,:); path = [path;path(end,:)+nei(ind,:)]; if norm(path(end,:)-pre) == 0 || ... %超出边界或陷入局部最优了 path(end,1)==1 || path(end,2) ==1 || ... path(end,1)==w || path(end,2) ==h; break; end end hold on; plot(path(:,1),path(:,2)); figure; mesh(imgre);
结果如下:
原图:

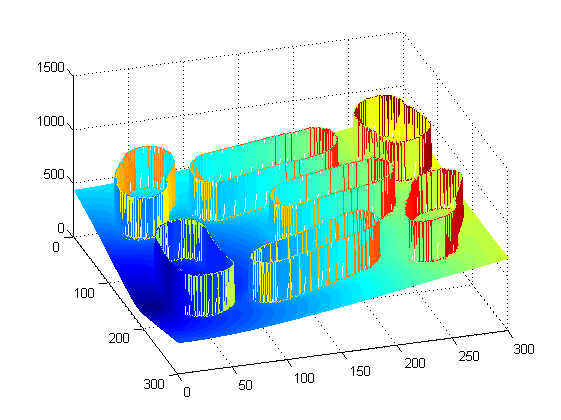
人工势场:

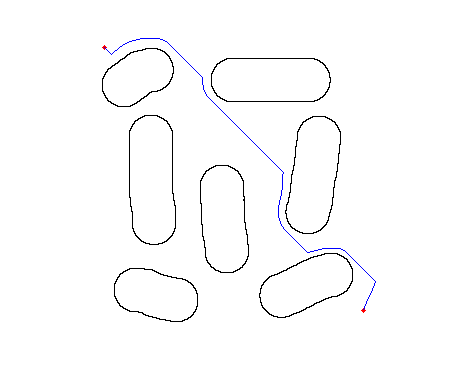
规划路径:
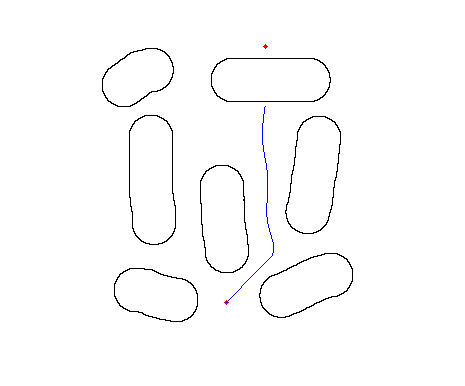
不过该方法有时候会陷入局部最优,比如下面这个势场:
规划路径: