论文阅读:Adaptive NMS: Refining Pedestrian Detection in a Crowd
Adaptive-NMS(CVPR 2019)
文章
又是一篇在NMS上面做文章的paper。。读完之后感觉,哇!自己再想的深一点也能想出来呀,可是想出来和做出好效果真是两码事。。尤其是没有人告诉你这个idea的价值只能靠自己判断的时候。扯远了。。。还是说一说这篇文章吧。
NMS是目前基于深度学习的目标检测模型的重要的后处理步骤,针对目标检测来讲,NMS具体操作就是将所有检测结果(设为集合A)中score最大的结果取出来加入到最后的检测结果集合(设为集合B),然后将A中其它检测结果i中与该结果进行比较,如果如该结果的相似度(往往使用IoU)超过一个阈值就将i从A中去掉。重复上述操作,直到A为空空集,伪代码如下(greedy-NMS就是普通的NMS):

然而普通NMS的问题在于,如果两个ground truth本身就有overlap的话,这个时候就不好办了,如果overlap较小,没有问题,但如果overlap较大呢?比crowd这种场景,这时候要想能检测出两个gt,只能设置较大的阈值来保证较小score的结果不被抑制。可矛盾在于,在crowd这种情况下,人群有时候密集有时候稀疏,高的阈值又会导致对于稀疏的情况下产生过多的False Positive(即被错认为positive的结果)。为了尝试解决这个问题呢,ICCV 2017一篇soft-NMS横空出世(靠一行代码就发了ICCV,牛逼。。。。)。soft-NMS的思想是,NMS所谓的“抑制”可以看做将检测结果的分数置0了,从而就不要该结果了,那么可不可以不置0,而是减小score呢,不过是IoU越大,score减小的越多。
为什么可以这样弄呢?其实细想一下,虽然会存在gt之间存在overlap的情况,但我们的目的是抑制那些overlap更大的(比如有三个结果ABC,分数分别为0.9,0.8,0.7,其中AC是正确结果,A和B的overlap大于A和C的,这样经过一轮NMS后BC的分数可能就变了0.6,0.5,从而将B抑制了)最后实验证明。。。这个想法还真有效!
这篇论文呢,针对crowd中的行人检测这一特殊的应用场景,对soft-NMS又进行了优化,使得在人群密集的地方,NMS阈值较大,而人群稀疏的地方NMS阈值较小。但是问题在于怎么判断人群是否密集,又怎么根据密集程度定NMS阈值呢?对于第一个问题。。。当然是用CNN啦!于是文章就定义了第i个物体处的密度如下:
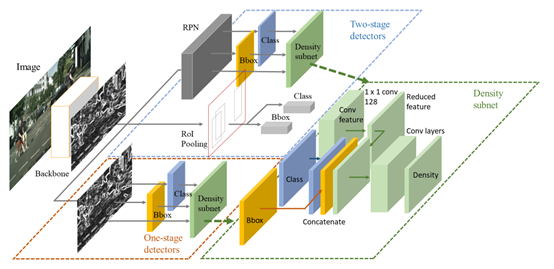
因此在训练CNN时,每次还需要求出密度作为监督信号,训练网络能够拟合这个密度函数,即输入一张图片,能输出每个位置的物体密度,但这个参数怕是作者调了不短的时间,模型如下:
有了密度之后,soft-NMS就改进成了

emmmm,文章的方法就是这样,感觉也是很自然的发现一个问题然后想办法去解决,不过个人以为这个模型恐怕真不好调参。