然后,正文来了,我将在下面介绍2点环境配置,1.launch文件的关联,2.roslib的导入
- launch文件的关联
具体做法就是在file/settings里面打开filetypes
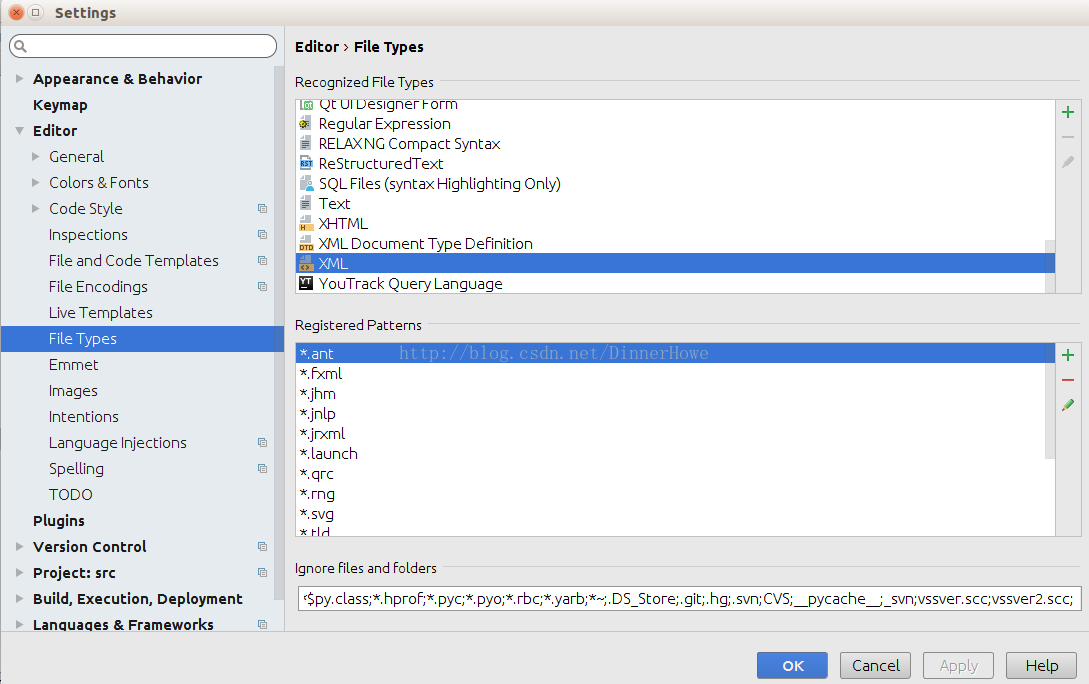
然后在registered patterns里面添加*.launch文件,点ok完成launch文件的关联
2.roslib的导入
这里介绍pycharm要如何和终端环境bashrc中配置的那样直接关联/opt/ros/indigo/setup.bash。
首先打开终端,然后输入:
- gedit ~/.local/share/applications/jetbrains-pycharm-ce.desktop #当前用户可用
- gedit /usr/share/applications/jetbrains-pycharm-ce.desktop #全部用户可用
然后会出现一个有以下内容的文档:
- [Desktop Entry]
- Version=1.0
- Type=Application
- Name=PyCharm Community Edition
- Icon=/home/howe/Downloads/pycharm-community-2017.1/bin/pycharm.png
- Exec="/home/howe/Downloads/pycharm-community-2017.1/bin/pycharm.sh" %f
- Comment=The Drive to Develop
- Categories=Development;IDE;
- Terminal=false
- StartupWMClass=jetbrains-pycharm-ce
如果是空白文档,那么就是文件开错了,输入:
- gedit /usr/share/applications/
接着修改其中的Exec变量,在‘=’后面添加bash -i -c,改完如下:
- Exec= bash -i -c "/home/ubu/tools/pycharm-professional-2016.2.3/bin/pycharm.sh" %f