最近看了一些人脸识别的综述及几篇经典论文。这里简单记录下MTCNN论文及Tensorflow的复现过程。感觉人脸检测属于目标检测下的一个方向,不过由通用目标检测改为人脸检测,即多分类改为2分类,且为小目标检测。而且人脸检测还加上了关键点检测,可以依靠关键点增加召回率。主要思想还是依靠的通用目标检测,除了yolo和R-CNN系列,还多出的一个算法系列为级联网络结构,MTCNN为其中一个代表。以前讲过通用目标检测的两种方法,这次主要讲一下级联网络的MTCNN这一种方案。
附带一句我理解的阅读论文思路。首先看综述,梳理脉络。之后找到经典方法即有重大突破的几个节点,之后搜该方法的博客,明白大致意思。之后看论文,因为论文中细节更加丰富,之后结合论文,看源码,进行复现。源码是用的其他人的,非本人写的
主要参考博客https://blog.csdn.net/qq_41044525/article/details/80820255
https://zhuanlan.zhihu.com/p/31761796
MTCNN分为三个网络,P-net,R-Net,O-Net. 先来下预测部分总体流程图(我只复现了预测部分源码,不过会讲一下loss函数)。
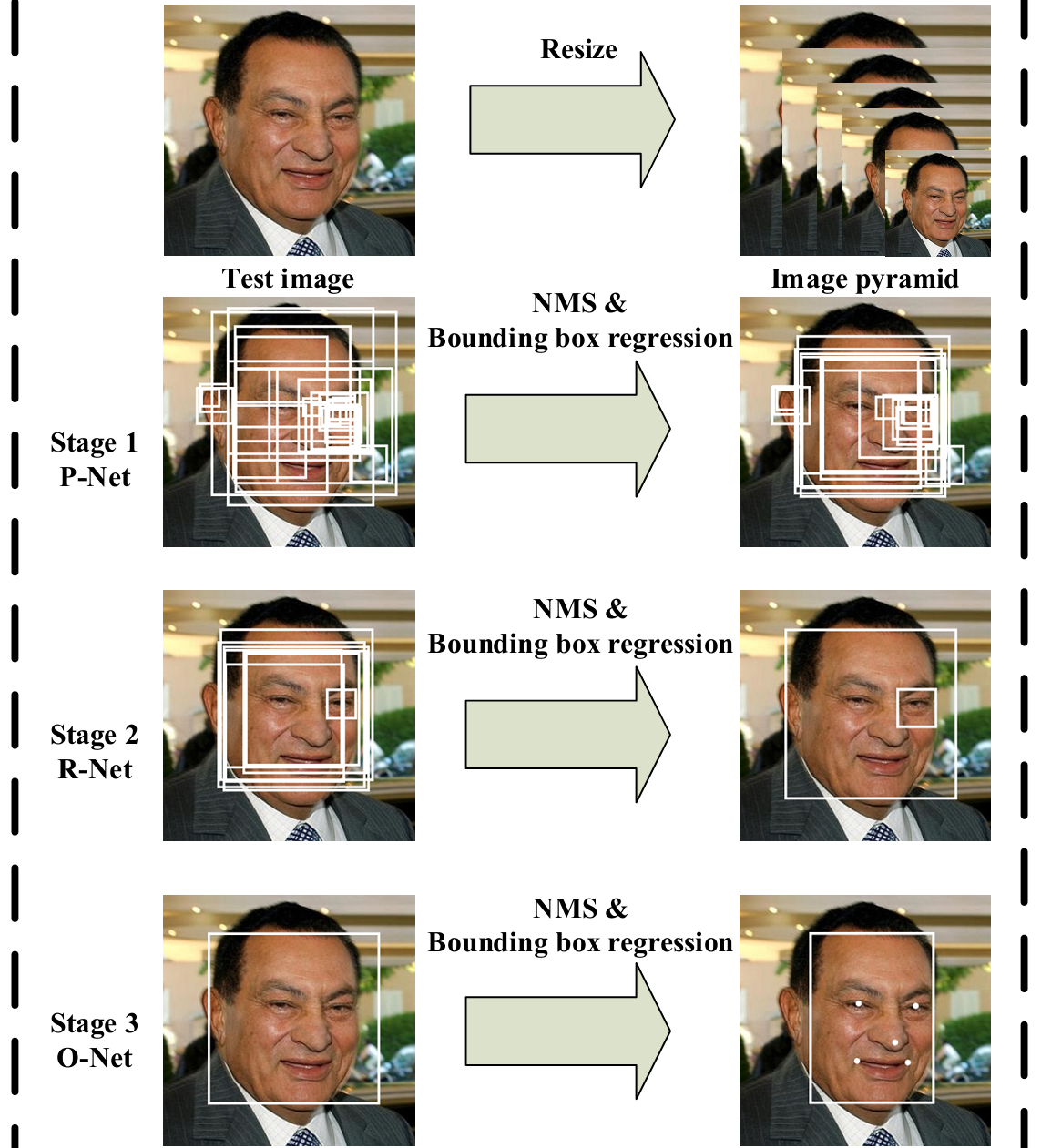
1. Stage 1
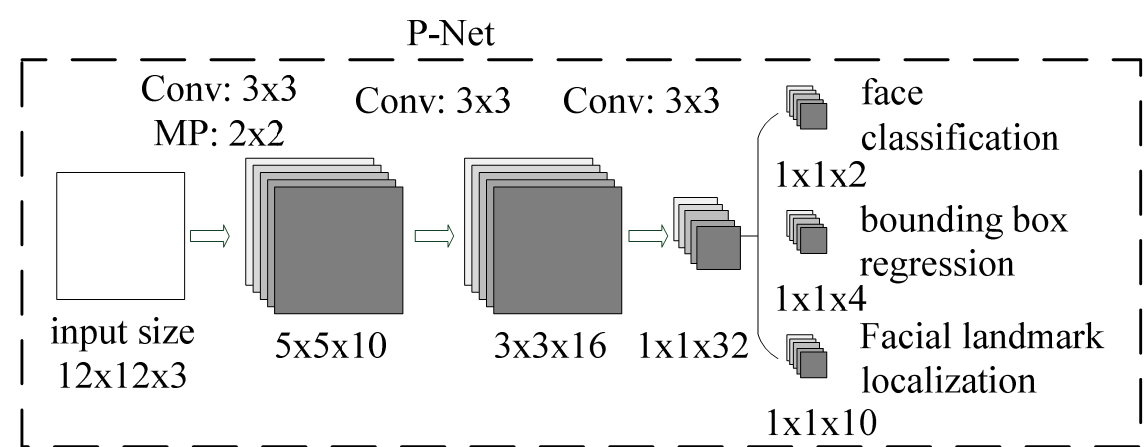
与训练时不同,单预测部分来说,输入图片非固定大小,而是将原图进行缩放,生成图像金字塔,即系列的图片,最小规格为12*12的。R-net网络结构如图,整体可看成将原图整图进行卷积(利用12*12,strides=2),之后生成预测的分类及位置偏移(无脸部关键点),网络输出中每一个1*1的方格映射到原图的感受野为12*12。由此生成系列的预测值,由此可认为输入为12*12大小。网络部分代码就不列出了,就一个网络结构,很好理解。预处理代码如下:
###作用是将原图整图输入,生成图像金字塔,输入网络中,以增加准确性。
factor_count=0
total_boxes=np.empty((0,9))
points=[]
h=img.shape[0]
w=img.shape[1]
minl=np.amin([h, w])
m=12.0/minsize
minl=minl*m
# creat scale pyramid
scales=[]
while minl>=12:
scales += [m*np.power(factor, factor_count)]
minl = minl*factor
factor_count += 1
# first stage ###将产生的最小为12*12系列的图片送入pnet网络中,获得输出的回归框。scale为缩放比例,可以用来推测在原图中的坐标
for j in range(len(scales)):
scale=scales[j]
hs=int(np.ceil(h*scale))
ws=int(np.ceil(w*scale))
im_data = imresample(img, (hs, ws)) ###此时输入非12*12,而是每一个单元的感受野为12,这样每一块就生成了系列的预测框
im_data = (im_data-127.5)*0.0078125
img_x = np.expand_dims(im_data, 0)
img_y = np.transpose(img_x, (0,2,1,3))
out = pnet(img_y) ###输入pnet网络中,获得输出
out0 = np.transpose(out[0], (0,2,1,3)) ###二分类,即为人脸的概率
out1 = np.transpose(out[1], (0,2,1,3)) ###预测框偏移回归 out0 size(1,H/12,W/12,2)
out1 size(1,H/12,W/12,4)
##输出为第一层的预测框坐标合集,如何产生系列的预测框。
boxes, _ = generateBoundingBox(out1[0,:,:,1].copy(), out0[0,:,:,:].copy(), scale, threshold[0])
下面是genereteBoundingBox代码.函数最用为输出第一层每12*12大小的坐标,偏移,及预测得分
def generateBoundingBox(imap, reg, scale, t): ###reg为偏移 imag为是否为正类 scal缩小的比例 t 为阈值
# use heatmap to generate bounding boxes
stride=2
cellsize=12
#### 转置计算很常见,目的只要为了方便比大小,做运算。通用目标检测中也常用,对位置坐标进行转置
imap = np.transpose(imap)
dx1 = np.transpose(reg[:,:,0])
dy1 = np.transpose(reg[:,:,1])
dx2 = np.transpose(reg[:,:,2])
dy2 = np.transpose(reg[:,:,3])
y, x = np.where(imap >= t) ###筛选出大于阈值的坐标。因为每个小单元格有一个预测概率值,四个坐标偏移值 H/12,W/12,y,x可看成index
if y.shape[0]==1:
dx1 = np.flipud(dx1)
dy1 = np.flipud(dy1)
dx2 = np.flipud(dx2)
dy2 = np.flipud(dy2)
score = imap[(y,x)] ###得分即为预测为人脸的概率,筛选大于阈值的预测框得分
reg = np.transpose(np.vstack([ dx1[(y,x)], dy1[(y,x)], dx2[(y,x)], dy2[(y,x)] ])) ###预测为满足条件的人脸image预测框坐标偏移
if reg.size==0:
reg = np.empty((0,3))
bb = np.transpose(np.vstack([y,x]))
###为何*2+1?应该为*2+4? q1,q2值应为在原图中每一个预测框的左上角,右下角坐标
q1 = np.fix((stride*bb+1)/scale)
q2 = np.fix((stride*bb+cellsize-1+1)/scale)
boundingbox = np.hstack([q1, q2, np.expand_dims(score,1), reg])
return boundingbox, reg ##返回每一个12*12块大小的坐标及对应偏移及该块得分
之后对预测值进行修正,预修剪,产生proposal的坐标,将预测出的回归框部分提取出来,以便输入到第二个网络中。代码如下
1 # inter-scale nms 对预测出的预测框进行nms,筛选预测框 2 pick = nms(boxes.copy(), 0.5, 'Union') 3 if boxes.size>0 and pick.size>0: 4 boxes = boxes[pick,:] 5 total_boxes = np.append(total_boxes, boxes, axis=0) 6 7 numbox = total_boxes.shape[0] ####筛选出的预测框个数 8 if numbox>0: 9 pick = nms(total_boxes.copy(), 0.7, 'Union') ###提高阈值,进一步进行nms 10 total_boxes = total_boxes[pick,:] 11 regw = total_boxes[:,2]-total_boxes[:,0] 12 regh = total_boxes[:,3]-total_boxes[:,1] 13 qq1 = total_boxes[:,0]+total_boxes[:,5]*regw 14 qq2 = total_boxes[:,1]+total_boxes[:,6]*regh 15 qq3 = total_boxes[:,2]+total_boxes[:,7]*regw 16 qq4 = total_boxes[:,3]+total_boxes[:,8]*regh 17 total_boxes = np.transpose(np.vstack([qq1, qq2, qq3, qq4, total_boxes[:,4]]))###依次为修正后的左上角,右下角坐标及该部分得分 18 total_boxes = rerec(total_boxes.copy()) ####使预测框变为正方形 19 total_boxes[:,0:4] = np.fix(total_boxes[:,0:4]).astype(np.int32) ##取整 20 dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph = pad(total_boxes.copy(), w, h) #####对坐标进行修剪,使其不超出图片大小
2. Stage 2
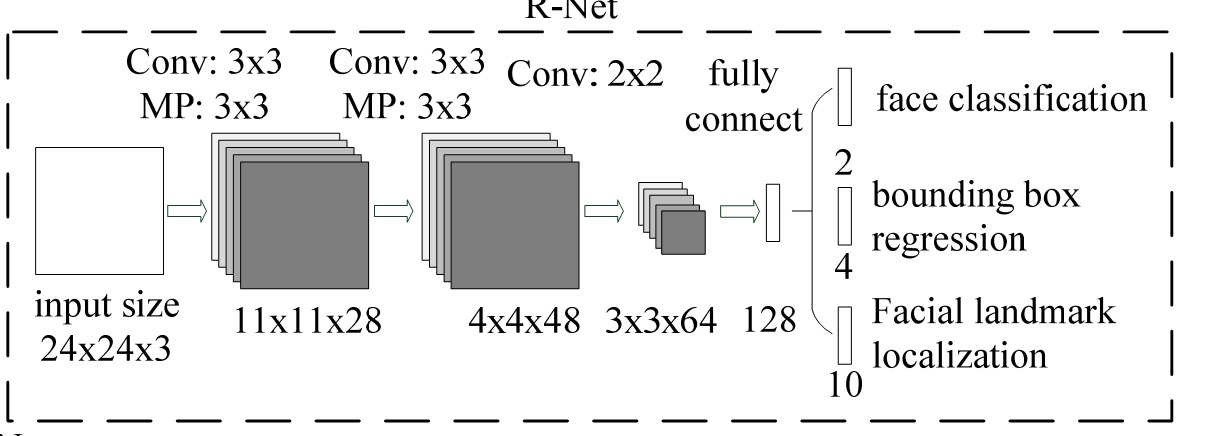
网络结构如图所示。此时的输入必须为24*24大小,输入的图像为stage1产生的porposals,抠出来,输入到stage2中。此处很像Faster-RCNN的第一步,初步筛选出纯图像,将不相关部分过滤掉。这也是级联的意义。注,预测网络输出同样只有得分与预测框坐标修正,无关键点信息。以下为代码,与第一步很相似。
1 numbox = total_boxes.shape[0] 2 if numbox>0: ###由第一步得出的预测框,在原图进行裁剪,resize,输入到第R-Net中 3 # second stage 4 tempimg = np.zeros((24,24,3,numbox)) 5 for k in range(0,numbox): 6 tmp = np.zeros((int(tmph[k]),int(tmpw[k]),3)) 7 tmp[dy[k]-1:edy[k],dx[k]-1:edx[k],:] = img[y[k]-1:ey[k],x[k]-1:ex[k],:] 8 if tmp.shape[0]>0 and tmp.shape[1]>0 or tmp.shape[0]==0 and tmp.shape[1]==0: 9 tempimg[:,:,:,k] = imresample(tmp, (24, 24)) ####将porposalsresize成24*24大小。 10 else: 11 return np.empty() 12 tempimg = (tempimg-127.5)*0.0078125 13 tempimg1 = np.transpose(tempimg, (3,1,0,2)) 14 out = rnet(tempimg1) ###输入到R-Net中得到输出 15 out0 = np.transpose(out[0]) ####预测框坐标偏置 16 out1 = np.transpose(out[1]) ######预测得分 17 score = out1[1,:] 18 ##第一步中筛选出的预测框坐标。此时的坐标为原图中的坐标偏移,并非resize之后的坐标偏置。即直接将偏移加到原图中坐标即可 19 ipass = np.where(score>threshold[1]) 20 total_boxes = np.hstack([total_boxes[ipass[0],0:4].copy(), np.expand_dims(score[ipass].copy(),1)]) 21 mv = out0[:,ipass[0]] ###第二步得出的偏移值 22 if total_boxes.shape[0]>0: 23 pick = nms(total_boxes, 0.7, 'Union') 24 total_boxes = total_boxes[pick,:] ###先nms,第一步中调高阈值 25 total_boxes = bbreg(total_boxes.copy(), np.transpose(mv[:,pick])) ####加偏移后的坐标 26 total_boxes = rerec(total_boxes.copy())###变为正方形
3. Stage 3
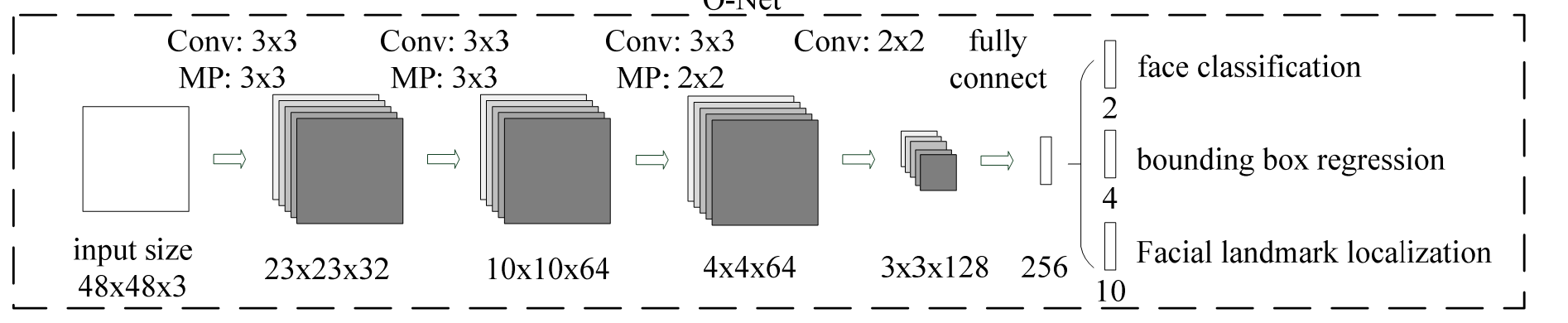
第三步网络没什么好说的,和第二步一样的流程。不过此时多了一个关键点预测。最后得到了结果。
1 numbox = total_boxes.shape[0] 2 if numbox>0: 3 # third stage ###仿照第二步,将第二步得出的预测图像输入到第三个网络中 4 total_boxes = np.fix(total_boxes).astype(np.int32) 5 dy, edy, dx, edx, y, ey, x, ex, tmpw, tmph = pad(total_boxes.copy(), w, h) 6 tempimg = np.zeros((48,48,3,numbox)) 7 for k in range(0,numbox): 8 tmp = np.zeros((int(tmph[k]),int(tmpw[k]),3)) 9 tmp[dy[k]-1:edy[k],dx[k]-1:edx[k],:] = img[y[k]-1:ey[k],x[k]-1:ex[k],:] 10 if tmp.shape[0]>0 and tmp.shape[1]>0 or tmp.shape[0]==0 and tmp.shape[1]==0: 11 tempimg[:,:,:,k] = imresample(tmp, (48, 48)) 12 else: 13 return np.empty() 14 tempimg = (tempimg-127.5)*0.0078125 15 tempimg1 = np.transpose(tempimg, (3,1,0,2)) 16 out = onet(tempimg1) 17 out0 = np.transpose(out[0]) 18 out1 = np.transpose(out[1]) 19 out2 = np.transpose(out[2]) 20 score = out2[1,:] 21 points = out1 22 ipass = np.where(score>threshold[2]) 23 points = points[:,ipass[0]] 24 total_boxes = np.hstack([total_boxes[ipass[0],0:4].copy(), np.expand_dims(score[ipass].copy(),1)]) 25 mv = out0[:,ipass[0]] 26 27 w = total_boxes[:,2]-total_boxes[:,0]+1 28 h = total_boxes[:,3]-total_boxes[:,1]+1 29 points[0:5,:] = np.tile(w,(5, 1))*points[0:5,:] + np.tile(total_boxes[:,0],(5, 1))-1 30 points[5:10,:] = np.tile(h,(5, 1))*points[5:10,:] + np.tile(total_boxes[:,1],(5, 1))-1 31 if total_boxes.shape[0]>0: 32 total_boxes = bbreg(total_boxes.copy(), np.transpose(mv)) 33 pick = nms(total_boxes.copy(), 0.7, 'Min') 34 total_boxes = total_boxes[pick,:] 35 points = points[:,pick] 36 37 return total_boxes, points ####得出最终的预测值
此处只有预测部分的代码,在训练时,有一个与其他目标检测不同的地方在于,有5个人关键点检测,也计入了损失函数中,以此进行训练,可增加识别的准确性。
来勉强解读一下。。这部分看的很粗略。
1. 脸分类损失函数。交叉熵损失函数

2. 预测框损失函数。 平方损失
3. 关键点损失函数。同样为平方损失

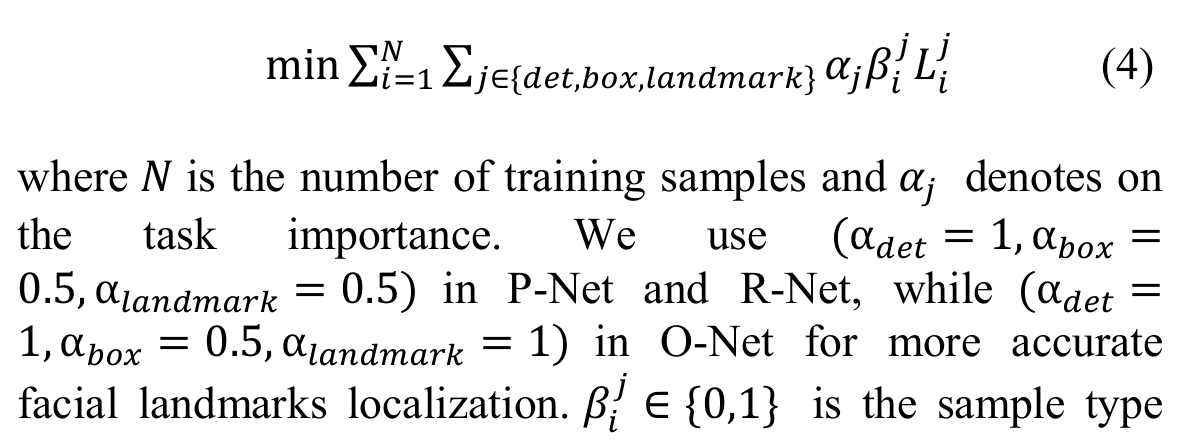
3. 综合训练,整体损失函数。每部分网络的权重不同。
最后再添加一部分内容,即人脸对齐与识别.看到一段别人代码,根据眼睛记性对齐。我不太理解为什么这么做,因为opencv就有原装函数可以做对齐,不知道为何还要用PIL丽丽的函数。具体过程就是通过使两个眼睛在一条水平线上,从而对图像进行仿射变换,还有进一步对图像进行裁剪。复代码
# -*- coding: utf-8 -*-
"""
Created on Thu Jan 1 16:09:32 2015
@author: crw
"""
# 参数含义:
# CropFace(image, eye_left, eye_right, offset_pct, dest_sz)
# eye_left is the position of the left eye
# eye_right is the position of the right eye
# 比例的含义为:要保留的图像靠近眼镜的百分比,
# offset_pct is the percent of the image you want to keep next to the eyes (horizontal, vertical direction)
# 最后保留的图像的大小。
# dest_sz is the size of the output image
#
import sys,math,Image
# 计算两个坐标的距离
def Distance(p1,p2):
dx = p2[0]- p1[0]
dy = p2[1]- p1[1]
return math.sqrt(dx*dx+dy*dy)
# 根据参数,求仿射变换矩阵和变换后的图像。
def ScaleRotateTranslate(image, angle, center =None, new_center =None, scale =None, resample=Image.BICUBIC):
if (scale is None)and (center is None):
return image.rotate(angle=angle, resample=resample)
nx,ny = x,y = center
sx=sy=1.0
if new_center:
(nx,ny) = new_center
if scale:
(sx,sy) = (scale, scale)
cosine = math.cos(angle)
sine = math.sin(angle)
a = cosine/sx
b = sine/sx
c = x-nx*a-ny*b
d =-sine/sy
e = cosine/sy
f = y-nx*d-ny*e
return image.transform(image.size, Image.AFFINE, (a,b,c,d,e,f), resample=resample)
# 根据所给的人脸图像,眼睛坐标位置,偏移比例,输出的大小,来进行裁剪。
def CropFace(image, eye_left=(0,0), eye_right=(0,0), offset_pct=(0.2,0.2), dest_sz = (70,70)):
# calculate offsets in original image 计算在原始图像上的偏移。
offset_h = math.floor(float(offset_pct[0])*dest_sz[0])
offset_v = math.floor(float(offset_pct[1])*dest_sz[1])
# get the direction 计算眼睛的方向。
eye_direction = (eye_right[0]- eye_left[0], eye_right[1]- eye_left[1])
# calc rotation angle in radians 计算旋转的方向弧度。
rotation =-math.atan2(float(eye_direction[1]),float(eye_direction[0]))
# distance between them # 计算两眼之间的距离。
dist = Distance(eye_left, eye_right)
# calculate the reference eye-width 计算最后输出的图像两只眼睛之间的距离。
reference = dest_sz[0]-2.0*offset_h
# scale factor # 计算尺度因子。
scale =float(dist)/float(reference)
# rotate original around the left eye # 原图像绕着左眼的坐标旋转。
image = ScaleRotateTranslate(image, center=eye_left, angle=rotation)
# crop the rotated image # 剪切
crop_xy = (eye_left[0]- scale*offset_h, eye_left[1]- scale*offset_v) # 起点
crop_size = (dest_sz[0]*scale, dest_sz[1]*scale) # 大小
image = image.crop((int(crop_xy[0]),int(crop_xy[1]),int(crop_xy[0]+crop_size[0]),int(crop_xy[1]+crop_size[1])))
# resize it 重置大小
image = image.resize(dest_sz, Image.ANTIALIAS)
return image
if __name__ =="__main__":
image = Image.open("/media/crw/DataCenter/Dataset/CAS-PEAL-R1/POSE/000001/MY_000001_IEU+00_PD-22_EN_A0_D0_T0_BB_M0_R1_S0.tif")
leftx =117
lefty=287
rightx=187
righty= 288
CropFace(image, eye_left=(leftx,lefty), eye_right=(rightx,righty), offset_pct=(0.1,0.1), dest_sz=(200,200)).save("test_10_10_200_200.jpg")
CropFace(image, eye_left=(leftx,lefty), eye_right=(rightx,righty), offset_pct=(0.2,0.2), dest_sz=(200,200)).save("test_20_20_200_200.jpg")
CropFace(image, eye_left=(leftx,lefty), eye_right=(rightx,righty), offset_pct=(0.3,0.3), dest_sz=(200,200)).save("test_30_30_200_200.jpg")
CropFace(image, eye_left=(leftx,lefty), eye_right=(rightx,righty), offset_pct=(0.4,0.4), dest_sz=(200,200)).save("test_40_40_200_200.jpg")
CropFace(image, eye_left=(leftx,lefty), eye_right=(rightx,righty), offset_pct=(0.45,0.45), dest_sz=(200,200)).save("test_45_45_200_200.jpg")
CropFace(image, eye_left=(leftx,lefty), eye_right=(rightx,righty), offset_pct=(0.2,0.2)).save("test_20_20_70_70.jpg")
---------------------
作者:RiweiChen
来源:CSDN
原文:https://blog.csdn.net/chenriwei2/article/details/42320021
版权声明:本文为博主原创文章,转载请附上博文链接!
图中较难理解的函数为image.transform用来做仿射变换的,如果不理解的话可参考这个https://stackoverflow.com/questions/17056209/python-pil-affine-transformation
附上opencv自带用来做仿射变换的函数 ,虽然粗糙,但应该够用了,不用上面那么麻烦的代码。封装好的函数好处就是可直接算出坐标变换矩阵。如何使用参考
https://blog.csdn.net/a352611/article/details/51418178
RotateMatrix = cv2.getRotationMatrix2D(center=(Img.shape[1]/2, Img.shape[0]/2), angle=90, scale=1)
RotImg = cv2.warpAffine(Img, RotateMatrix, (Img.shape[0]*2, Img.shape[1]*2))
最后,说一下人脸识别。 人脸识别即判断两个图片是不是同一个人。具体过程分三部分:
1. 采样,将图片输入到MTCNN中,得到人脸框,进行对齐,之后裁剪。
2. 将第一步裁剪出的图像输入到网络中,一般为Inception网络, 得到输出向量。
3.有两种处理结果方式,一种是三元损失函数,即 若 x1,x2为同一个人的,y为另一个人的,则 (x1-x2)-(x1-y)必然是小于0的,损失为0,可看成计算两个向量的相似度。这种方法大大减少了计算过程,需要的数据量也少。另为一种为聚类,也是通过计算两个向量之间的具体来计算损失的。一般采用第一种方法。
说到这里,我提下自己的理解。对于人脸对齐,和人脸识别,其实主要用到了矩阵变换的知识,这块要把矩阵的意义弄得比较明白。可参考西瓜书的聚类章节,对各种距离解释的很清楚,说到底就是矩阵变化,纯数学计算,没什么新内容。时间充裕可以看一下,不然会用那几个函数就行了,opencv及python库太多了