原文链接:http://tecdat.cn/?p=6585
本文介绍了用于涡轮桨距角控制的永磁同步发电机(PMSG)和高性能在线训练递归神经网络(RNN)的混合模糊滑模损失最小化控制的设计。反向传播学习算法用于调节RNN控制器。PMSG速度使用低于额定速度的最大功率点跟踪,其对应于低风速和高风速,并且可以从风中捕获最大能量。设计了具有积分运算切换面的滑模控制器,利用模糊推理机制估计不确定性的上界。
1.简介
最近,风力发电系统作为清洁和安全的可再生能源引起了极大的关注。风力发电可以通过使用电力电子转换器的恒速和变速操作来操作。由于风能产生的改善和闪烁问题的减少,变速发电系统比固定速度系统更具吸引力。并且风力涡轮机能够在最大功率操作点关于各种风速下,通过调整轴速度最佳地在所有风速达到最高效率 。
RNN变桨控制系统的设计
RNN的体系结构
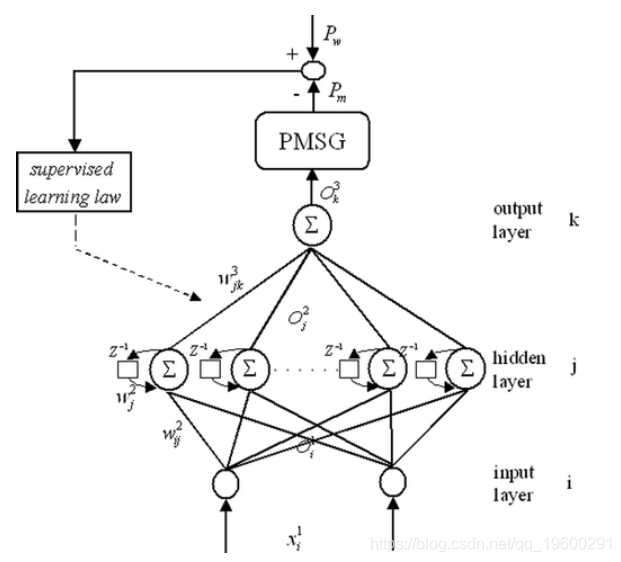
RNN具有三层,即,输入,隐藏和输出。在所示的三层神经网络图采用实施建议的RNN用于涡轮控制器。
图. RNN的体系结构。
matlab实现
clc; clear; close all; setup; dbstop if error %% RNN % useGPU = true; dataType = 'single'; backward = true; input = InputLayer(struct('batchSize',5,'useGPU',useGPU,'dataType',dataType,'backward',backward,'reverse',true)); embedd1 = EmbeddingLayer(struct('hidden_dim',512,'input_dim',input.vocabSize,'useGPU',useGPU,'dataType',dataType,'backward',backward)); rec1 = RecurrentLayer(struct('hidden_dim',512,'input_dim',512,'useGPU',useGPU,'dataType',dataType,'backward',backward)); rec2 = RecurrentLayer(struct('hidden_dim',512,'input_dim',512,'useGPU',useGPU,'dataType',dataType,'backward',backward)); loss = SoftmaxLayer(struct('hidden_dim',input.vocabSize,'input_dim',512,'useGPU',useGPU,'dataType',dataType,'backward',backward)); % train MaxIter = 10000; history_cost = zeros(1,MaxIter); for i = 1 : MaxIter tic; target = input.fprop(struct('reverse',false,'fprop',true)); loss.fprop(rec2.fprop(rec1.fprop(embedd1.fprop(target,size(target,2)),size(target,2)),size(target,2)),size(target,2)); history_cost(1,i) = gather(loss.getCost(target)); display(history_cost(1,i)); embedd1.bprop(rec1.bprop(rec2.bprop(loss.bprop(target)))); loss.update(@SGD); rec2.update(@SGD); rec1.update(@SGD); embedd1.update(@SGD); toc; end
模拟结果
传统的比例积分(PI)型控制器由于其简单的控制结构,易于设计和低廉的成本而在工业中广泛使用。然而,如果受控设备是高度非线性的或者期望的轨迹随着更高的频率变化,则PI型控制器可能不具有令人满意的性能。对于变速风力涡轮机,通常采用机械致动器来改变叶片的桨距角以控制功率系数。
动态性能测试
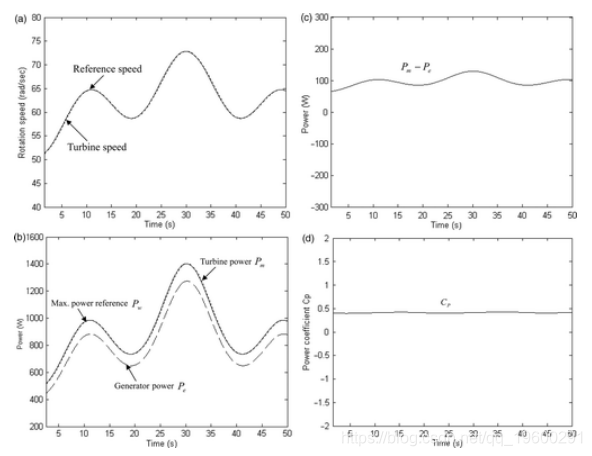
图(a)显示了轴速; 可以观察到系统跟踪额定发电机速度下的最大功率。图6(b)显示了最大功率跟踪控制的验证。
图风速剖面的模拟结果:(a)风廓线速度跟踪,(b)最大功率跟踪控制信号,(c)功率跟踪误差和(d)功率系数C p。
效率性能测试
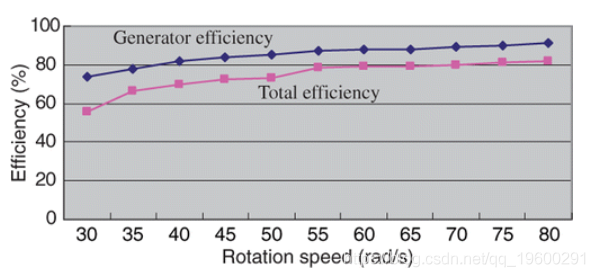
图显示了效率性能。考虑到中高速范围内的转换器损耗几乎为80%。
模拟效率性能:
结论
本文介绍了用于变速风能系统的驱动PMSG系统的设计。速度控制器设定发电机扭矩指令,这是通过电流控制回路实现的。所提出的系统已经在实时应用中实现,具有商用PMSG和模拟风力涡轮机行为的直流驱动器。仿真结果表明该系统具有良好的性能。
动态性能不仅在稳态而且在快速输入时显示出转速的准确估计,而传统的PI控制器不能确定各种风速的不确定性模型。本研究成功实现了模糊滑模速度和RNN桨距控制器,用于控制WECS。即使参数不确定,该技术也可以保持系统稳定性并达到所需的性能。